
地下人防通道工程测量技术方法探讨
2020-07-02 06:32孔莉明太原市测绘研究院山西太原030002
经纬天地 2020年1期
孔莉明(太原市测绘研究院,山西 太原 030002)
0.引言
太原市双塔寺地下人防通道修建于20世纪70年代。随着时间的推移,受限于当时的修建条件、使用材料、工艺水平的影响,该人防工程多处渗水,部分区域甚至发生了坍塌。因双塔陵园需重新设计、建设公园,并可能将原地下人防通道开放使用,需将地下人防通道的平面位置、布局及埋深等基本信息准确地测绘出来,以确保施工过程中对地下人防通道的保护。
双塔寺地下人防通道环境恶劣,内部无照明设备,空气稀薄,局部有淤泥和封堵情况;布局错综复杂,和通道相连设有各类洞室。测量条件不理想,测量难度较大。且双塔寺地下人防通道修建伊始,由多家单位联合修建,受限于当时的条件,本项目施测前无对地下通道平面位置描述准确的图纸及地下通道埋深等信息。为确保在本次施工过程中地下通道不被破坏,同时可能对地下人防通道进行开发利用、维护修缮,准确了解地下通道的健康状况,故急需测量地下人防通道的平面位置及布局、地下人防地表高程、洞顶高程、地下人防地表位置及埋深。
1.工程测量实施方案
通过分析已有资料、现场踏勘后,对该地下人防战备工程测量技术方法进行研究探讨,确定主要工作内容为首级控制测量、导线测量、洞穴测量、示位测量、地面三维激光扫描测量等。具体包括E级GPS控制点测量,四等水准测量;约6.2km地下三级导线测量;约6.2km地下人防通道及房间的平面位置测量、洞底和洞顶标高测量;约6.2km定位地下人防通道的地表位置测量,计算埋深。
实施方案为现场踏勘、GPS控制点(导线点和水准点)的选取与布设、各项地下人防战备工程测量施测、测量数据处理、成果整理等,具体作业流程(如图1所示):
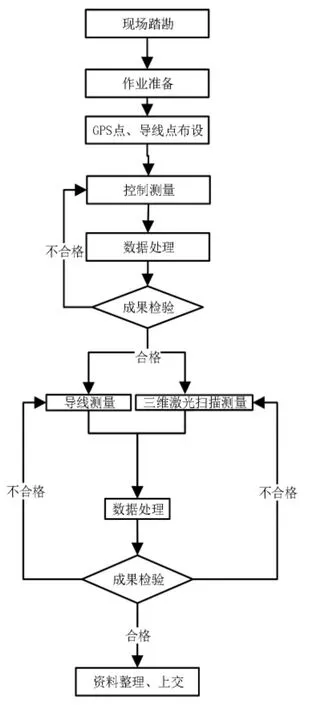
图1 地下人防通道工程测量作业流程图
2.地下人防通道施测技术路线
2.1 点位选取与布设
2.1.1 GPS控制点布设
依据项目设计要求,GPS控制点选取与布设应满足下列要求:GPS控制点点位应选在土质坚实、稳固可靠的地方,且每个GPS控制点至少有1个通视方向,通视条件好,方便后续的导线测量;GPS控制点点位应选在视野开阔,高度角在15°以上的范围内,无障碍物;点位附近不应有强烈干扰接收卫星信号的干扰源或强烈反射卫星信号的物体;GPS点埋设选用7cm GPS专用观测钢钉直接钉入地面。
2.1.2 水准点布设
本项目水准点利用布设的GPS控制点。
2.1.3 导线点布设
依据项目设计要求,地下人防通道内导线点的选取应满足下列要求:地下人防通道内拐角较多,故选取导线点时在满足规范要求的前提下应尽可能地增大导线边的长度,导线点宜选取在地下人防通道拐角、岔口处。经现场踏勘,通道正中间为人防排水,导线点埋设时应避开排水的沟渠盖板;导线点埋设用10cm螺纹钢钉直接钉入地面;点号依据前期踏勘时标注的洞室标号进行次级命名。
2.2 控制测量
2.2.1 平面控制测量
施测前,按要求制订好观测计划,明确基本技术要求、GPS测站作业要求及观察过程中禁止操作规定等。实际测量过程严格按照观测计划执行,保证观测质量,输出整理观测成果数据。
本项目平面首级控制设计时拟采用GPS静态观测的方式进行,但在观测完成后进行GPS解算时,发现部分点的观测质量一般,影响了静态基线解算及平差。因受限于测区的条件,故实际施测时并未重新进行静态观测。而是采用单基准站(TYCORS站)直接获取控制点独立坐标(快速静态)的方式并用全站仪观测各控制点通视方向的角度、距离。经过计算,这种方式获取的控制点平面坐标精度较好,本项目中用来代替原设计中的静态观测。通过快速静态的测量方法,解算结果经过实地测量验证,精度良好,满足要求。
2.2.2 高程控制测量
按照国家四等水准测量要求,采用水准测量的方法,与选取的已知二等水准点进行联测。
水准测量的具体技术要求(如表1、表2所示):

表1 水准观测的视线长度、前后视距差和视线高要求

表2 水准观测的限差
2.3 导线测量
地下人防通道无可用光源,本次导线测量配备专人进行照明工作,保证基座的对中、整平精度。
2.3.1 导线平面测量
为了提高观测精度,本次选用0.5″级仪器进行导线测量,使用徕卡TS50测量机器人自动观测。
水平角观测采用方向观测法,水平角精度要求(如表3所示):

表3 水平角观测要求
距离观测精度要求(如表4所示):

表4 水平角观测要求
2.3.2 导线高程测量
垂直角及边长测量要求(如表5所示):
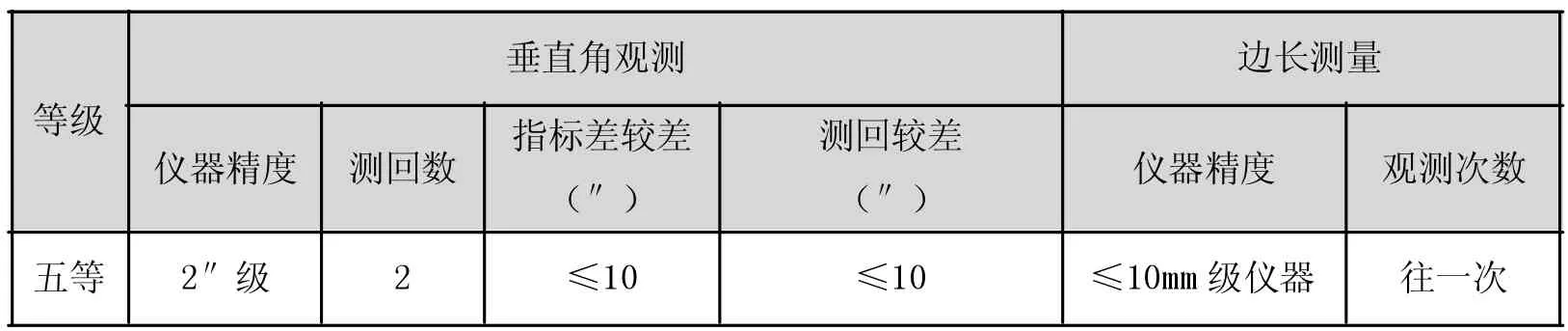
表5 垂直角及边长测量要求
因地下人防在各个出入口处高差较大,垂直角观测值容易超限。经研究,本项目在地下人防出入口处观测时增加了测回数。仪器在自动观测时若观测值超限,则立即报警并重新开始本测回观测。高精度测量仪器的使用确保了本次导线测量及三角高程测量的观测质量。
2.4 洞室测量
三维激光扫描技术通过高速激光扫描测量的方法,以点云的形式获取物体或地形表面的三维空间信息和反射率信息,能够准确获取目标对象的纹理信息。相较于与传统的数据采集方法,该技术具有效率好、精度高、非接触主动测量等优势,有效避免了传统作业方式外业劳动强度大、时间长、重复测量、工作效率低等缺点,为快速建立物体的三维影像模型提供了一种全新的技术手段。
本项目的洞室测量采用三维激光扫描结合导线及碎部测量的方式,来确定洞室的相对位置及绝对位置。在布设的导线点上架设全站仪,采集人防洞室的关键节点,并在后期处理过程中与采集的碎部点坐标相结合处理,以提高洞室的平面位置精度。三维激光扫描测量选用天宝TX5型三维激光扫描仪。
2.4.1 测站选取及仪器架设原则
(1)本次选取仪器有效扫描距离约测站前后视距20m,故测站间间距不宜超过35m,同时为确保工期,仪器架设距离不宜过短。
(2)在地下通道岔口处应架设仪器。
(3)因三维激光扫描仪存在底部60°扫描盲区,为了尽可能减少扫描盲区对成果的影响,仪器不宜架设过高。
(4)架设仪器时应将脚架底部螺旋旋转至脚尖露出,检查仪器底座的稳定性、底座卡扣工作状态、仪器与脚架的固定旋钮、伸缩性脚架的固紧螺丝等,上述检查完毕后将仪器安置在脚架上,并整平。
(5)每4-5测站需联测洞内导线点。
2.4.2 标靶球摆放要求
测站间利用标靶球和洞内特征点进行拼接。标靶球摆设不应摆设为等边三角形,测站前进方向应确保有3个以上的特征点及标靶球,以便后期的点云数据匹配。标靶球摆设时应避开本站扫描盲区并考虑下一站的仪器架设位置。
2.4.3 三维激光扫描
(1)技术指标
主要利用三维激光扫描进行洞室及主洞的平面位置测量,依据规范要求及本次项目定级,三维激光扫描连续拼接次数不应超过5次,故需在扫描中带入部分控制点,以便后期点云数据的拼接及精度验证。
三维激光扫描主要技术要求为:在扫描过程中,要求观测人员记录观测起始时间后躲避至扫描有效范围外,根据仪器预算扫描时间,计算当前测站扫描结束时间,待扫描完成听到仪器提示音后,方可靠近仪器。扫描完成后,根据屏幕显示的扫描点云数据结果,粗略寻找标靶球,确保能进行顺利拼接。扫描时应确保拐角、岔口处的扫描质量。人防入口处应扫描已知控制点,应保证在1测站扫描3个以上控制点,以便后期点云数据的定位。
单测站扫描结束后,在仪器上对测站数据进行简单的查看,主要查看内容包括标靶球是否全部扫描上,标靶球在本测站的点云数据中是否清晰可见,拍摄照片过程中是否有人员走动,是否有手电等高亮度光源影响拍摄质量等。若某一测站扫描质量不佳,需重新进行扫描。
受洞内环境、测量条件的限制,本次作业采用点云数据先整体拼接,后验证精度的作业方式。将地下人防的三维激光扫描数据完全拼接、定位后,在点云数据里采集放置在导线点上的标靶球坐标。与经过平差处理后的导线点坐标进行比对(经实验研究确定比对密度为6 point/150m)。存在部分区域不能满足6 point/150m的导线点比对密度,需外业全站仪采集部分洞室特征点,特征点应采集特征线与地面相交处节点。
(2)数据处理
利用扫描时联测的地表控制点及洞内联测的部分导线点进行点云数据的绝对定位。在绝对定位过程中发现,由于点云数据量较大,计算机无法运行。故本项目采用分段绝对定位的方式进行点云定位。点云绝对定位精度最大残差为0.3m。由于残差过大,不满足本次测量的精度要求,故将点云拼接成果投影成图片,将图片导入到软件中采集洞内的轮廓,并将采集的轮廓与全站仪测量获取的洞内的碎部点结合,对洞室的平面绝对位置进行纠正。用这种后处理方式进行绝对定位,纠正后的人防洞室轮廓与外业实测的地表出入口、通风口等拟合较好,经过比对,最大误差约0.13m,能够满足本次使用。
利用点云数据,采集洞室净高变化处的洞内净高。结合洞内布设导线点的三角高程信息及全站仪碎部点采集的洞室高程信息,来确定洞内的顶高、底高。地表高程利用高分辨率航摄资料立体采集获取,外业对部分航测点进行了检核。重点采集地表覆盖类型变化、高程变化处的地表高程信息。通过洞内地面高程、洞室净高(洞顶高程)、地表高程来反映地下人防的埋深信息。
2.5 示位测量
导线测量及洞室测量结束后,整理出地下人防的平面位置信息。利用RTK、全站仪对地下人防平面位置关键性节点进行定位,采集节点所在的地表高程,计算埋深。当地下人防跨过建筑时,需如实采集人防线路上建筑物的散水及正负零高程。部分人防通道位于现状施工区内,在施工区内的示位测量时,地面高程起伏较大,需在数据中备注说明。
2.6 精度评定
本项目中,由于数据量较大,测站数较多,通过软件内置的绝对定位功能进行定位的结果不能满足要求(精度0.3m)。经探讨研究,采用后处理的定位方式,即点云拼接结束后,将点云拼接成果进行投影,输出投影图片(0.03m/pixel),采集投影图片的轮廓信息,利用全站仪测量的洞内特征点,进行洞室轮廓的纠正。纠正结果与地面实测的出入口、排气孔、瞭望哨等进行比对。经比对,最大偏差约13cm,满足精度要求。
3.结束语
本项目涉及到的测量内容较多,综合性较强,实施过程采用了一些较新的测量技术和测量仪器,并严格遵守相关规范和技术标准,准确测定了地下人防通道的平面位置、布局及埋深等基本信息,保证成果满足要求,为后续对双塔寺地下人防通道保护工作的开展奠定基础。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
测绘地理信息(2022年2期)2022-04-02
文萃报·周五版(2021年45期)2021-11-17
科技和产业(2021年9期)2021-11-01
陕西水利(2021年5期)2021-06-21
岩土工程技术(2020年2期)2020-04-22
测绘通报(2017年2期)2017-03-07
中南大学学报(自然科学版)(2016年2期)2017-01-19
世界博览(2015年20期)2015-09-10
岩土力学(2014年5期)2014-05-18
