人工智能“合乎道德责任设计”的信任问题探析
2020-07-06 03:19马玉杰
江苏理工学院学报 2020年1期
马玉杰
摘 要:随着人工智能的广泛应用,如何确保人工智能的决策和行为符合人类的道德规范,将是未来科技发展的重点和方向。从我国发布的《新一代人工智能治理原则》中“负责任人工智能”的概念出发,提出人工智能的发展应“合乎道德责任设计”,在此基础上分析人工智能的不同道德決策路径,明确智能机器的推理过程,就此对人工智能道德决策中的信任问题进行探究,进一步确保人工智能系统的透明性和可预测性,提高公众对于人工智能技术的信任,推进人工智能与人类的和谐共存。
关键词:人工智能;合乎道德责任设计;道德决策;信任
中图分类号:B82-057 文献标识码:A 文章编号:2095-7394(2020)01-0073-06
人工智能的快速发展和大规模应用带来了一系列的伦理困扰。如何确保其决策和行为符合人类基本道德规范,获取公众的信任,成为各国人工智能设计者、生产者、应用者及社会管理者十分关注的课题。MIT的情感计算研究组主任罗莎琳德·皮卡德就说过,机器越自由,就越需要道德准则。要机器为自己的行为负责,前提是机器具有道德主体性是可能的。[1]但不容置疑,人工智能的决定权依旧在人,人工智能的设计也必须合乎道德责任的规范。
2019年6月17日,国家新一代人工智能治理专业委员会发布《新一代人工智能治理原则——发展负责任的人工智能》。这是我国在国家层面制定的首个发展人工智能治理原则,“负责任”涵盖了人工智能的基础研发层到应用层,成为贯穿我国人工智能发展的一条主线。[2]
本文从我国新一代人工智能治理原则中提出的“负责任人工智能”的概念出发,提出人工智能的发展应“合乎道德责任设计”的原则,在讨论发展其必要性及内涵的基础上,分析人工智能的不同道德决策路径,就人工智能的信任问题进行初步地思考,从而引起人们更多关注和更加深层次的探讨。
一、人工智能“合乎道德责任设计”的必要性及其内涵
随着人工智能技术的迅猛发展,其决策和行动的自主性也在日益增强,由此引发的伦理问题也日益凸显,甚至在一定程度上会对人类社会形成威胁。因此,对人工智能的认识不能只停留在技术层面,人工智能的发展应以“合乎道德责任设计”为原则,提高公众对人工智能的信任,确保人工智能以人为本,造福人类、增进人类共同福祉。
(一)“合乎道德责任设计”的必要性
作为一种新兴技术,人工智能在极大地改善人类生活的同时,也潜存着各种安全风险。在人工智能的应用中,用户的个人敏感信息很容易泄露,个人隐私权将不可避免地受到侵犯,其中金融和医疗保健等领域最容易受到攻击。在金融方面,用户财产安全将受到不法分子的极大威胁,医疗服务的过程中的人工智能系统也会不可避免的造成一些失误,例如:选择不正确的药物、算错药物的剂量或是使用了过期药品,造成患者的身体伤害,最终导致病人死亡。图灵在《智能机器》一文中也详细讲述了人工智能技术的发展趋势和方向,同时也提到了人工智能对人类的威胁。路易斯维尔大学网络安全实验室的罗曼教授发表的《人工智能和网络安全:人工智能的失败》列举出发生在2016年的10项重大人工智能失败案例,其中涉及的安全威胁包括特斯拉自动驾驶汽车造成人员伤亡、机器人伤人事件等。因此,设计“合乎道德责任”的智能机器,确保人工智能的安全可靠,保障人类健康和生命安全,成为国内外人工智能领域研究的核心内容之一。
现今,国际上越来越多的国家及机构开始制定人工智能伦理的发展规划。2007年4月,韩国起草了《机器人道德规范》,为人类与机器人之间的关系制定了规章制度;2016 年,美国特朗普政府更新了奥巴马政府发布的《国家人工智能研究和发展战略计划》,再次强调了人工智能的伦理法律与社会影响;2018年12月27日,日本发布《以人类为中心的AI社会原则》的规范,提出AI的使用不得侵害宪法和国际规范保障的基本人权;2019年6月17日,我国新一代人工智能治理专业委员会发布《新一代人工智能治理原则——发展负责任的人工智能》,以“发展负责任的人工智能”为主题,希望“负责任”贯穿人工智能的研发和应用的全过程;同时建立人工智能问责机制,明确研发者、使用者和受用者等的责任。[3]在我国推动人工智能发展的关键时期,开展人工智能伦理问题的探讨有极为重要的意义。[4]
(二)“合乎道德责任设计”的内涵
在机器伦理学中,最重要的问题之一涉及到如何使人工智能的设计“符合道德”。该领域的先驱苏珊·安德森(Susan Anderson)将这一目标定义为:“制造一种遵循人类理想的道德原则或一套指导其行为原则的机器;它在可能采取行动路线的决策中受既定原则的指导,即在机器上“增加道德层面”。[5]其道德决策基于避免不道德行为或禁止某些不道德行为。[6]并在可预见的未来,机器人只允许被设计和用作目标机制中影响道德行动和结果的道德参与要素。[7]
美国作家艾萨克·阿西莫夫在他著名的《机器人三定律》中通过构想内置的“机器伦理调节器”,设定机器人不得危害人类的原则。为机器人提出了第一个道德体系:第一定律:机器人不得伤害人类,也可能因不作为而伤害人类。 第二定律:机器人必须服从人类的命令,除非命令会与第一定律发生冲突。第三定律:机器人必须保护自己的存在,只要这种保护与第一定律或第二定律不冲突。如今,人工智能专家、伦理学家等正在共同努力,走在实践阿西莫夫这一设想的路上。
2017年12月,美国电气与电子工程师协会(简称IEEE),发布了《合伦理设计:利用人工智能和自主系统最大化人类福祉的愿景》,呼吁将人类规范与道德价值观嵌入人工智能系统中,在人工智能发展过程中关注人工智能的设计正义性,避免人工智能设计的不公平、使用的不公平、算法歧视等社会问题。[8]2018年5月25日,欧洲联盟出台的《通用数据保护条例》(General Data Protection Regulation,简称GDPR) ,针对人工智能应用的潜在风险,国际社会在标准设计、伦理道德等方面也提出了一系列试图控制智能机器系统的方案,逐渐形成一个共识原则,即通过算法给智能机器嵌入人类的价值观和道德规范。
二、人工智能“合乎道德责任设计”的决策路径
如何设计“合乎道德责任”的人工智能?涉及两个问题:首先,应为人工智能系统选择哪些道德理论进行决策;其次,根据不同的决策路径如何为一组候选决定计算结果。[9]本文主要对选择何种合适的道德理论,予自上而下與自下而上两种不同道德决策路径两个方面进行分析,判定智能机器的决策能力是否可靠,其决策系统是否安全透明,值得人类信任。
(一)道德理论决策选择
人工智能信息处理有五个阶段模型。第一阶段:获取信息,即从传感器或遥测中获得信息;第二阶段:分析信息,即分类和整合数据;第三阶段:产生替代性的行动方案,即为一组候选决定计算结果;第四阶段:选择决策,即从备选方案中进行选择;第五阶段:激活执行器,即执行与该选择相对应的动作。[10]
从智能机器道德责任的角度来看,关键阶段在于第三阶段与第四阶段——产生替代性的行动方案和选择决策。在选择决策这一阶段,其关键要素是伦理学理论。尽管道德机器人的设计可以采用许多道德理论,但人工智能作为一种特殊目的的智能体,它的伦理道德关注点不是以“做好事”本身作为道德因素,而是做一些不违反道德规则的事。这里我们主要考虑两种道德理论:功利主义和道义主义。
一项行动的价值取决于其后果的整体利益,即指从所有可能的行动中选择适当的行动,以使所有人员获得最大利益,该道德决策基于边沁的“功利主义”。功利主义侧重于效用最大化,以道德偏好的形式出现在效用函数中[11],基于对所有受影响的社会单位做出最有利的决定。从这一角度看,具有自动检测能力的无人驾驶汽车在行为上具有行为能力,该自动驾驶汽车能够检测出街道上的行人并避开行人或为了不伤害行人而停车。因此,有能力计算其行为后果并评估其带来收益的机器人必须被视为具有道德责任的。但是,该道德决策很难定义为“好”。在大多数应用程序中,它被“实用程序”所代替。相反,道义主义更容易排除特定类别的行为,这种道德理论是关于遵循确定的对或错,以及应如何行事的准则,使人工智能在道德上做出人类可接受的行为。例如,无论环境或后果如何,都可以指示智能机器不许杀人、说谎或造成伤害。但这种方法侧重于根据独立于其行动后果的道德原则行事,不关注行动的后果。
人工智能的决策处理能力取决于机器人行为的道德理论的选择。如果它有能力展望、计划和评估结果的“好处”,那么可以将其设计为遵循功利主义的道德决策路径;如果它只能遵守规则,需要一种解决规则冲突的方法,道义主义的决策路径更合适。
(二)自上而下与自下而上决策路径分析
在人工智能系统中,将替代决策过程称为自上而下、自下而上的决策方法。[12]在自上而下的决策路径中,人工智能的设计者安装可预测结果的决策算法。从本质上讲,其道德决策过程为选择功利主义或道义主义之类的道德理论,将人类认为是合乎道德责任的行为内容嵌入到机器中,然后仅需确定何时应用这些行为即可。
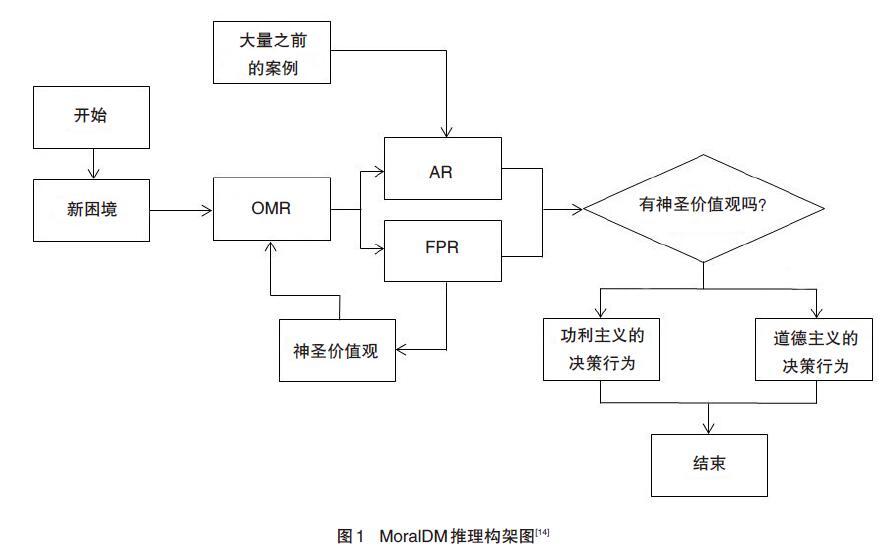
例如,Dehghani等人基于自上而下研究进路构建的MoralDM模型,是一种试图模仿人类道德决策过程的计算模型[13],该模型集成了AI的多种技术,例如处理自然语言以从心理刺激中产生形式化的表示,用于建模和测量世俗与神圣价值影响的定性推理算法,确定道德后果和效用的类比推理算法。根据所面临的问题,该模型能够表现出功利主义和道义主义行为。
图1为MoralDM模型的推理构架图。如图所示,当给定新的困境时,该模型的推理过程正式开始。该模型通过数量级推理(OMR)模块计算出效用关系之间的每个选择,同时采用了第一原则推理(FPR)和类比推理(AR)混合推理的方法选择决策。其中,AR与FPR同时运行:AR模块需要事先解决的决策案例借鉴过去的经验;FPR使用规范伦理学中的功利主义和义务论,在两种互斥模式下运行制作决策;如果被分析的案件中不涉及任何神圣的价值,则通过选择提供最高结果效用的行动来显示功利主义的决策行为,反之确定涉及神圣的价值,则选择道义论模式,对行动的结果效用优先选择无作为。
在自下而上的决策路径方法中,程序员构建了一个开放式系统,该系统能够从其环境中收集信息,预测其行动的结果,从替代方案中进行选择,并且最重要的是具有从经验中学习的能力。自下而上的方法至少可以通过三种方式体现出来:第一种方法。机器人可以通过反复试验,类似于无监督学习来发展自己的道德决策选择方法;第二种方法。机器的工程师可以训练机器人学习预先建立的道德准则,类似于某种监督学习;第三种方法。机器人可以采用混合学习方法,即允许它继续从经验和环境中学习,但要以预先建立的原理为基础。我们可以设想训练一种本质上类似于围棋游戏程序AlphaGo中神经网络的监督学习方法,通过情景响应的实例为例,进一步学习行为举止。
采用这种方法的道德智能体不会在道德决策过程中强加道德理论。相反,他们利用学习机制和内在价值来指导自己的行为。自下而上的决策路径方法试图提供一种环境,使智能机器在该环境中通过反复试验的经验逐步学习,并选择适当的行为。为此,基于自下而上方法的智能机器是寻求发展和完善自己的道德规范。
温德尔·瓦拉赫和科林·艾伦在其著作《道德机器如何让机器人明辨是非》中提出的一种自下而上的对比方法,重点是合乎道德的智能机器拥有一套自己的道德约束,使智能机器的目标与人类的目标保持一致。GenEth模型就是一个一般的道德困境分析仪,其知识基于与道德相关的特征、职责、行动、案例和原则的概念。[15]道德上相关的特征包括是否存在一组给定职责的程度。动作在GenEth系统中表示为整数元组,其中每个值代表其满足或违反给定职责的程度。一个案例涉及两个动作,并表示为相关动作的相应职责满足/违反程度的差异的元组。最后,将道德行为偏好原则定义为析取范式谓词给予案例的职责差异的下限。
三、人工智能“合乎道德责任设计”的信任问题
猜你喜欢
科学Fans(2019年6期)2019-07-26
商界(2019年12期)2019-01-03
少年博览·小学高年级(2018年10期)2018-12-10
IT经理世界(2018年20期)2018-10-24
北京心理卫生协会学校心理卫生委员会学术年会论文集(2018年1期)2018-05-10
小康(2017年16期)2017-06-07
桃之夭夭B(2017年2期)2017-02-24
知音海外版(上半月)(2016年12期)2017-01-13
南风窗(2016年19期)2016-09-21
南风窗(2016年19期)2016-09-21