无人机航空摄影及正射影像制作技术实践
2020-07-15 02:07杨志强
甘肃科技 2020年5期
杨志强
(甘肃煤田地质局综合普查队,甘肃 天水 741002)
以往传统摄影测量只能进行二维空间构建及绘制,随着测绘技术的发展,利用传感器从三维场景来反应真实环境的摄影技术被逐渐推广应用。利用无人机进行航空摄像,并将采集的影像数据通过建立三维空间模型,这一技术的兴起被广泛的应用于地形图测绘、城市规划、工程测绘及文物保护等方面,例如管文晋(2019)将无人机倾斜摄影技术应用于矿山测绘中,并实践验证了该技术能充分满足矿山测绘基本要求[1];刘兆慧等(2019)针对以往全站仪采集和测量土石方工程任务繁琐耗时较长的问题,采用无人机倾斜测量技术计算土石方量,结果验证了这一技术具有计算准确、效率较高的优势[2];孙杰等(2019)分析了各类无人机飞行平台的技术特点,设计了多种倾斜摄影技术方案,研发出了多种规格型号无人机倾斜摄影设备[3];金辉(2019)利用无人机倾斜摄影技术在地质灾害区域进行可视化,为安全隐患排除和救援工作提供便利[4]。对于无人机倾斜摄影测量技术方法方面,国内外工作者进行了大量的研究及实践,对于正射影像制作及航拍设计方面,实践案例相比较少[5-7]。本文以额济纳旗无人机航空摄影及正摄影像制作技术为案例,收集额济纳旗已有地形资料,并通过实地踏勘,进行了无人机航飞以及正射影像的制作,为正摄影像测量技术提供借鉴。
1 测区范围及自然地理概况
额济纳旗地处祖国北疆,位于内蒙古自治区最西端,东与阿拉善右旗毗邻,西南与甘肃省酒泉市交界,北与蒙古国接壤,国境线全长507.147公里。全旗现辖3个镇、5个苏木、19个嘎查村,总面积11.46万km2,约占全区总面积的十分之一。居住着蒙、汉、回、藏等9个民族3.3万余人,是一个以蒙古族为主体的边境多民族聚居旗。历史悠久的额济纳旗,早在原始社会就有人类活动,堪称东西石器文化的连接点。
2 设计方案
2.1 投入的仪器设备
航空摄影设备:LTBT-测绘鹰航测遥感无人机平台(最小失速速度:50km/h、续航时间:3h、最小起降距离:50m、有效任务载荷:5kg)、佳能尼康 D800相机 (像幅为7360*4912、6300万像素、像素大小4.88微米、焦距长度7367.37像素)、飞思P65+相机(像幅为8984*6732、6000万像素、像素大小6微米、焦距长度5959.46像素),地面控制系统、GPS导航系统。图形工作站,空三加密软件PixelGrid,pixel4Dmapper,匀色软件OrthoMosaic,裁图软件GlobalMapper,图像处理软件Photoshop。
2.2 航飞计划
设计用图的选择:选择1:1万比例尺地形图作为航摄设计用图。
摄影比例尺:航摄比例尺根据农村土地承包经营确权1:2000比例尺的特点,结合摄区的地形条件,设定地面分辨率保持0.1m。
摄影航线布设:额济纳旗达来呼布镇航飞分区图和航线布设图如图1所示。
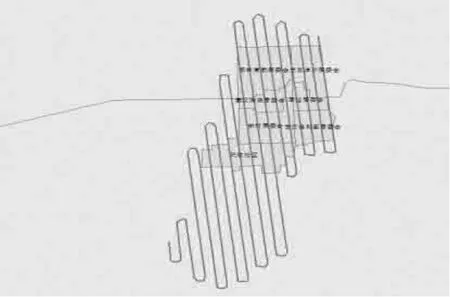
图1 航线布设图
2.3 像片控制测量
根据测区地形特点和航摄计划情况,本测区像控点采用航线布点法,就是在每条航线上平均隔6条基线跨度布设一个平高点。
像控点尽量选在道路行车线、斑马线、花台角、影像小于0.2mm的点状地物中心等明显的地方;若确无明显地方,可分开布设平面、高程控制点,一般不要选在房角、有草丛的田埂、有弧度的田角等,当布设的点高于地面时,还应提供该点至地面的比高。
2.4 数据检查
航空摄影成果质量检查采用内业程序检查配合人机交互检查的方法,外业检查只对样品的实际精度进行了检测,检测时采用苍穹GPS-RTK接收机,依托GPS CORS平台,在实地测量正射影像图上同名点的坐标,后与正射影像图的坐标进行比对得其误差值。
3 技术实施
3.1 像控点测量
根据测区地形特征和航摄资料情况,本测区采用平高区域网单航带双模型布网,用CORS连续运行基准站,作为像控点测量工作的起算数据。共完成22个像控点测量。平均900m一个像控点。如图2所示。

图2 额济纳旗像控点分布图
3.2 航测内业数据生成
1)根据现行国家法规、标准和规范精度要求,对航空影像和外业控制点资料进行分析,确认其可以满足空三加密作业要求,进而合理划分加密分区,编制加密计划。
2)按编制的加密计划,开始建立相应的加密分区工程;设置测区基本参数,建立相机文件、控制点文件。
3)按加密分区建立测区影像航线列表,对原始影像进行畸变差改正。
4)内定向:采用全自动内定向。
5)添加相邻航线间的偏移点(即航带间连接点),相邻航线间只加首尾两点,航线较长或旋偏角较大时增加连接点的密度,以利于航线间自动转点。
6)相对定向、全自动转点由软件自动计算完成。在大面积水域或大面积植被覆盖情况下,软件会自动记录并在计算完成后提示哪些模型无法自动完成,由人工干预适当加些关联点再自动匹配计算即可完成。
7)自动挑点。调用PixelGrid计算,选用5*3的模式进行挑点。
8)自动挑点后,检查加密区的点位分布情况,保证测区中每一张影像三度重叠区的上、中、下三个标准点位上必须有连接点;对少点、无点的影像进行人工添加连接点,处于影像边缘点进行删除,以保证控制网的精度、强度。
9)对于大面积落水区域,在影像落水区域的边上按间隔1~1.5cm添加连接点,使落水区域附近的像点网有一个稳固的边界,从而减少落水区域的影响。
10)量测像控点:根据外业像控点刺点说明和点位略图,实行立体观测切准点位,添加外业像控点。
11)平差计算:利用光束法区域网平差方法进行整测区平差。
12)加密分区接边:在单区网加密精度达到要求的条件下,进行区域网间接边处理。在网间接边处选取明显同名点,分别重新计算,解求同一点位在不同网中的坐标,并进行比较;评判较差是否在允许的范围之内,如果达不到要求,分别分析接边网的构网强度以及解算可靠性,经过修改、完善,重新进行计算,再进行比较,直至网间公共点的残差中误差符合规范要求。
3.3 正射影像图制作
1)在影像处理系统中,导入空三加密成果,生成立体像对。按照需求设置间距,计算单模型DSM。
2)通过设置不同的参数进行各种有针对性的操作:保留山体、或者去除房屋、或者提取水域,对应得到具有不同特征的DSM影像,然后再将所有的DSM进行融合,综合各个DSM的优点,从而得到整个测区的质量较高的DSM。
3)在DSM的基础上,通过自动过滤人工建筑物、林地等的高程信息,并改正自动匹配造成的误差,使之严格切准地表面,生成高精度的DEM单模型数据;之后系统自动拼接得到区域数字高程模型。
4)相邻数字高程模型接边没有出现漏洞现象,两数字高程模型间相邻行(列)格网点平面坐标连续且符合格网间距要求,高程符合地形连续、平滑连接的总体特征,即使出现跳变,也符合地貌特征。采用DEM对原始影像进行单模型正射纠正。以0.2m的像元大小进行双线性内插或三次卷积内插法进行重采样。
5)对OrthoMosaic进行色彩调整,整体颜色达到满意效果后,作为参考影像重新导入到影像处理系统中,对正射影像成果进行全自动匀色处理。DOM影像清晰,反差适中,没有出现重影、错位、扭曲、拉花等现象。
6)系统利用DSM和DEM智能判断地物优化生成镶嵌线,保证了建筑物及其他要素的完整性,并使接边自然过渡,无缝镶嵌。
7)根据现行国家法规、标准和规范要求进行图幅DOM裁切输出,裁切后的影像没有在边缘处出现黑白边,DOM接边重叠带也无明显的模糊和重影。
4 航摄技术总结
选择1:1万比例尺地形图作为航摄设计用图,航摄比例尺根据农村土地承包经营确权1:2000比例尺的特点,结合摄区的地形条件,设定地面分辨率保持0.1m,额济纳旗作了精度达0.1m的高分辨率影像数据的获取,飞行相对航高350m。航线沿线路中心线敷设,保证线路两侧的影像宽度不少于100m。选择太阳高度角大于45°,阴影倍数小于2的中午11点到下午2点为航摄时间。此测区飞行最终航向重叠度为80%,旁向重叠度为55%,航线间隔498m。本测区航飞区域共33km2,共18条航线,共1206张相片,飞行一个架次。
猜你喜欢
泉州师范学院学报(2021年6期)2022-01-07
法人(2021年11期)2021-11-24
宁波大学学报(人文科学版)(2021年4期)2021-07-07
矿产勘查(2020年8期)2020-12-25
河南城建学院学报(2020年3期)2020-08-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
新课程·小学(2017年8期)2017-09-20
IT经理世界(2017年4期)2017-03-25
汽车文摘(2016年6期)2016-12-07
遥感信息(2015年3期)2015-12-13