
基于扭摆的中低频响应谱修正方法研究
2020-07-21 10:06惠安民闫明冯麟涵杨宁
兵工学报 2020年6期
惠安民,闫明,冯麟涵,杨宁
(1.沈阳工业大学 机械工程学院,辽宁 沈阳 110870;2.海军研究院,北京 100161)
0 引言
实船或浮动平台水下非接触爆炸试验是检测舰艇及其舰载设备抗冲击能力的重要试验方法。试验中需要准确测量冲击响应谱,以标定被测试设备的冲击环境。据国内外公开文献报道,测量冲击响应谱的方法,一般为通过实船水下非接触爆炸测量冲击时刻的加速度时间历程,再应用Duhamel积分获得冲击响应谱[1-4],但该方法很难获取高质量的冲击信号。究其原因,主要是加速度信号中含有的趋势项误差会使冲击响应谱在中低频段出现较明显的失真现象,对舰艇抗冲击设计产生较大误导[5]。为从试验数据中获取较可靠的结果,诸多学者提出了各种数学修正方法。Grillo[6]提出基于最小二乘法和样条拟合曲线法修正趋势项误差,其原理主要是对测量得到的加速度信号进行多次积分拟合再微分。Goebel等[7]、李海广等[8]、于大鹏等[9]、李慧浩等[10]、梁兵等[11]分别依据经验模态分解(EMD)法、低通滤波法、小波变换法等不同修正方法,对加速度的趋势项误差进行修正研究。但这些数学方法会引入主观误差,导致修正后的结果还需要其他手段进行验证;除上述数学方法外,还可以通过给加速度传感器加装机械滤波器来修正冲击响应谱测量时中低频段出现的失真现象[3],但该方法对冲击响应谱的修正效果有限;或根据冲击响应谱定义,应用中低频弹簧振子和簧片仪对冲击响应谱进行直接测量。但两种设备都无法单独完成测量工作。由于簧片仪自身结构特点,在测量低频谱时位移响应较大,极易因根部应力过大产生断裂现象,且测量过程中产生的响应值为多阶模态叠加的总和,因此仅适用于5 Hz以上的测量工作[12]。而低频弹簧振子在测量5 Hz以下低频谱时,由于自身固有频率低,弹簧拉伸、压缩位移形变量过大、质量块重等缺点,均不利于冲击谱的修正工作。
本文针对趋势项误差的作用机理进行分析,提出一种扭摆模型用以修正冲击响应谱中低频段趋势项误差。对该扭摆进行纵向冲击机冲击试验,并根据趋势项误差产生机理设计一种基于EMD与最小二乘法联合修正趋势项误差的数学方法。分别对比弹簧振子、扭摆以及EMD与最小二乘法联合修正方法的修正数据,验证所提出的扭摆修正冲击响应谱中低频段的可行性。
1 冲击响应谱简介


图1 冲击响应谱模型Fig.1 Shock response spectrum model
Gaberson[15]为更加全面地反映冲击信息,发明了一种对数四坐标冲击谱绘制方法,将上述3种冲击响应在同一个图中表达出来,如图2所示。图2中:与纵轴呈+45°、-45°的线分别代表位移谱和加速度谱;对数四坐标系中的冲击谱形似三折线,左侧折线表示弹簧振子的极限谱位移,中间直线表示极限谱速度,右侧折线表示极限谱加速度。依据三折线谱,只要确定设备的安装频率,即可以确定该安装频率设备在冲击载荷作用下产生的最大相对位移D、相对速度v和绝对加速度a[16].

图2 冲击谱与三折线谱Fig.2 Shock spectrum and trilinear spectrum
2 趋势项误差对冲击谱的作用机理与修正
2.1 趋势项误差的作用机理
在实际测量冲击谱时,含有趋势项误差的加速度信号所积分得到的速度以及位移曲线在冲击结束后,其数值并不归0,甚至趋于无限大。这与舰艇在承受水下非接触爆炸冲击后,最终稳定静止于水面,其速度值为0的事实并不相符。此时含有趋势项的加速度信号绘制成的冲击谱在低频区的谱位移与谱速度高于正常值几个数量级,呈现明显的失真现象,对舰船的抗冲击设计产生极其严重的误导。冲击谱在低频区域的数值,一般取决于残余冲击响应谱[17]。残余谱是指冲击输入结束后,系统自由振动阶段的响应。由文献[17-19]可知,单自由度弹簧- 质量- 阻尼系统的相对位移冲击响应可由(1)式表示:
(1)


(2)
(3)
再假设单自由度的弹簧- 质量系统的阻尼为0,即有ξ=0,则(3)式可化简为(4)式:
(4)
由三角函数性质,该方程可进一步化简为(5)式:
(5)
式中:φ为相位角。
由此可求出此时的最大位移响应为
(6)

图3 最大残余位移响应ze、冲击结束时刻速度响应对系统最大位移响应zmax的影响Fig.3 Effects of maximum residual displacement response ze and velocity response at the end of shock on system maximum displacement response zmax

2.2 趋势项误差的EMD与最小二乘法联合修正方法
通过2.1节趋势项误差对冲击谱作用机理的分析,可以为修正趋势项误差方法提供有效的理论根据,即消除趋势项的同时,还要保证采样结束时刻速度归零。因此根据以上理论,本文设计一种基于EMD与最小二乘法的联合修正方法。该修正方法经过多次拟合与数学变换,仍无法解决人为引入的主观误差,但在一定程度上可以验证试验结果的正确性。
EMD可把原始信号中的各种频率成分以固有模态的函数形式,由高频到低频显示出来[20-23],如(7)式所示:
(7)
式中:x(t)表示原信号;cj(t)表示EMD得到的固有模态函数分量;r(t)表示残余信号,通常代表原信号的趋势或均值;N表示频率成分个数。因此,对含有趋势项误差的信号进行EMD法分解,得到的残余信号r(t)可以作为原信号中的趋势项误差。虽然该方法在消除趋势项误差方面很有优势,但却无法保证修正后的速度信号在采样结束时刻的值为0 m/s,使得修正效果并不完美。因此,需要进一步对数据进行修正。最小二乘法是一种通过最小化误差的平方和来寻找数据最佳的函数匹配方法,可以保证修正后的时域信号在采样结束时刻数值为零,在趋势向误差修正中得到一定应用。因此,通过以EMD方法为主、最小二乘法进行二次修正的联合修正方法,可以对趋势项误差进行较良好的修正。
3 扭摆模型
由于数学修正方法中的不确定性,工程上常采用弹簧振子与簧片仪直接修正由趋势项误差引起的中低频冲击响应谱的失真现象,并将修正结果与数学修正方法进行相互印证,以保证在中低频范围内得到较准确且完整的冲击谱。但弹簧振子与簧片仪本身也有着局限性,如低频弹簧振子体积、质量巨大,极不利于工程技术人员携带;而簧片仪虽然体积较小,但由于本身为悬臂梁结构,测量得到的数据为多阶模态相互叠加的综合响应,且在强冲击环境下,固定端易发生破损、折断等现象。
根据传统中低频冲击测量装置中存在的不足,本文提出一种用以测量冲击谱的扭摆装置(以下简称扭摆)。该扭摆在结构上与簧片仪相似,均为集中质量的悬臂梁结构,但扭摆为获得更大的量程,改变簧片仪固定端完全约束的连接方式,改为铰链连接方式,并在铰链段加装扭簧作为弹性元件。扭摆的工作原理为:扭摆铰链与基础刚性连接,当受到冲击载荷的冲击时,其集中质量的悬臂端以固定频率围绕铰链开始往复振动。其中弹簧振子、簧片仪以及扭摆的原理图如图4所示。

图4 弹簧振子、簧片仪以及扭摆的原理图Fig.4 Schematic diagram of spring oscillater, reed gage and torsional pendulum
3.1 扭摆运动方程及其近似解析解
设旋转中心到质量块重心的距离为l,摆杆质量为MRod,扭簧刚度为kTP,其摆角为θ,扭摆原理图如图5所示。

图5 扭摆的原理图Fig.5 Schematic diagram of torsional pendulum
建立扭摆的运动微分方程为
(8)
式中:g为重力加速度。
引入sinθ的泰勒级数展开式,并取其中的前两项代入原方程,可得(9)式:
(9)

对(9)式进行无因次化后,可得方程
(10)

对(10)式应用Ritz-Galerkin平均法求解其近似解析解,其解的形式为
(11)
式中:κ1,κ2,…,κn为待定的权系数;φ1(t),φ2(t),…,φn(t)为假定时间函数,n为正整数。假设上述微分方程的1阶近似解为(12)式:
(12)
式中:A0为1阶近似解的振幅;ω为1阶近似解的角频率。则(10)式可表述为
(13)

(14)
(13)式代入(14)式中并整理,可到非线性方程为

(15)
即扭摆非线性方程的解为
(16)
(16)式中,对于非平凡解而言A0≠0,故该方程的解可表示为
(17)
由(17)式可知,扭摆振幅A0是影响扭摆系统非线性的关键因素。在较小摆幅下,扭摆固有圆频率稳定,且呈现弱非线性性质,线性性质较明显。该段区域可以很好地应用于低频段冲击谱的修正工作中。但随着冲击输入的增大,振幅A0超过一定限度后,扭摆系统进入强非线性区域,导致固有频率随着振幅而改变,此时修正低频谱值不可信。为分析扭摆响应的近似线性范围,本文进行如下冲击试验。
3.2 扭摆几何参数与样机
根据(17)式,设计固有频率分别为6 Hz、10 Hz和20 Hz的扭摆,各扭摆的几何参数如表1所示。

表1 扭摆样机的几何参数Tab.1 Geometric parameters of torsional pendulum
如图6所示为20 Hz扭摆样机图。
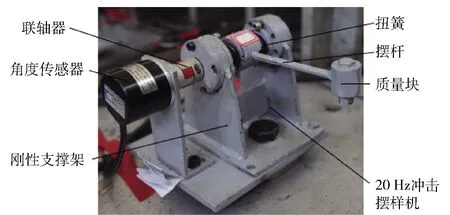
图6 20 Hz扭摆样机图Fig.6 20 Hz torsional pendulum prototype
4 弹簧振子与扭摆的冲击试验
由于扭摆受到冲击后,其响应值为摆动角度,对冲击谱而言,摆动角度并无实际物理意义。为分析扭摆对中低频段冲击响应谱的趋势项误差修正数据的可行性与可靠性,需先行分析相同冲击条件下中低频弹簧振子的最大位移响应与同频率下扭摆的最大摆角响应间的关系,同时还可以验证摆杆的近似线性摆角范围。
4.1 冲击试验原理
冲击试验中,首先通过加速度传感器测量弹簧振子与扭摆安装基座的加速度信号,并通过位移传感器直接获取弹簧振子在冲击过程中的最大位移响应。其次通过角位移传感器测量冲击过程中扭摆的最大角度响应,并建立弹簧振子最大位移响应与扭摆最大角度响应的函数关系。最后通过该函数关系,应用扭摆修正趋势项误差,与弹簧振子修正趋势项误差和EMD联合最小二乘法修正趋势项误差进行对比。
4.2 冲击试验
冲击试验采用500 kg级垂向冲击试验机提供冲击载荷,采用中国ECON公司生产的MI7016型16通道数据采集仪进行数据采集,采用中国东华公司生产的DH131E型压电式加速度传感器记录弹簧振子的瞬时加速度变化,采用美国MTS公司生产的CS系列磁致非接触型位移传感器对弹簧振子的位移响应进行测量,采用中国Robo Brain公司生产的RB100LA型角位移传感器对扭摆的摆角进行测量。如图7所示为冲击试验图。图7中在冲击台面上还布置有加速度传感器,用以测量冲击台的瞬时加速度变化量。
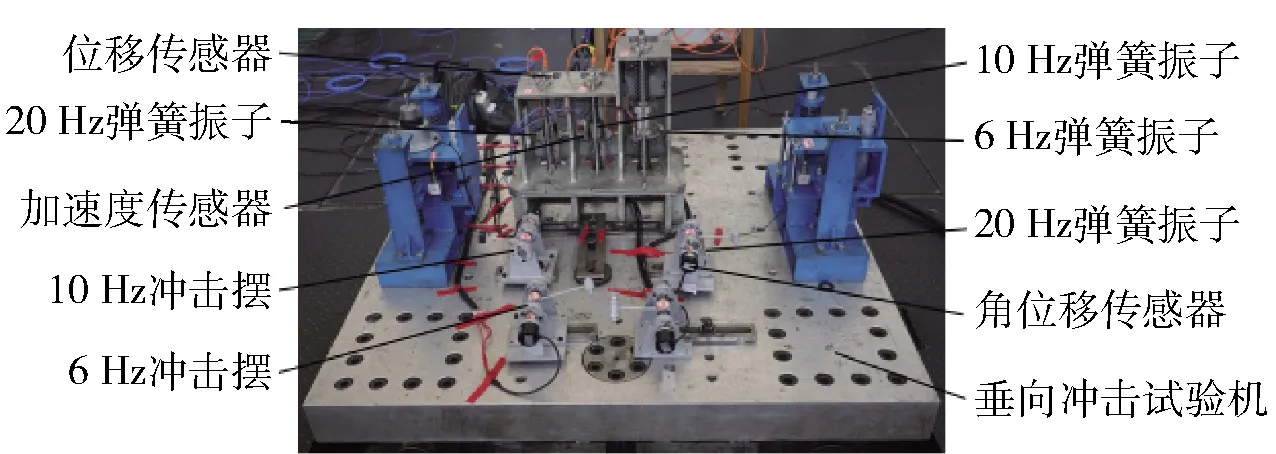
图7 冲击试验图Fig.7 Impact test
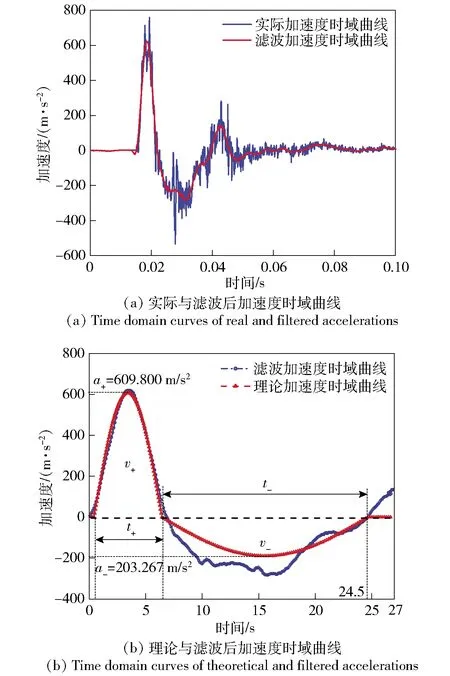
图8 某次冲击载荷加速度时域曲线波形Fig.8 Time domain wave forms of acceleration of a certain impact load
冲击载荷是根据德国BV043/85冲击标准推荐使用的组合半正弦波形冲击载荷,该组合半正弦波为冲击载荷的加速度时域曲线,分为正波和负波,正波波峰较高、脉宽较短,负波波峰较低、脉宽较长,且正波对时间积分的面积等于负波对时间积分的面积。图8(a)所示为某次冲击载荷与经带通滤波后加速度时域曲线,图8(b)所示为该冲击载荷理论加载波形和经滤波后实际加载波形对比。图8(b)中,a+为冲击载荷加速度正弦正波峰值,a-为冲击载荷加速度正弦负波峰值,t+为正波脉宽,t-为负波脉宽,v+为正波对时间积分的面积,v-为负波对时间积分的面积,该积分面积代表冲击速度。
在该冲击载荷下,弹簧振子与扭摆的响应如图9所示,其中,图9(a)为弹簧振子位移响应时域曲线,图9(b)为扭摆摆角响应时域曲线。

图9 冲击载荷下弹簧振子与扭摆时域响应曲线Fig.9 Time domain response curves of spring oscillater and torsion pendulum under impact load
冲击试验台液压压强由小逐渐增大,弹簧振子的最大冲击位移响应与对应频率下扭摆的最大摆角响应如图10所示。通过观察图10中的数据点发现,二者在一定范围内存在较良好的线性关系,因此基于最小二乘法,应用MATLAB软件,计算得到拟合曲线的线性段关系式如表2所示。

图10 弹簧振子最大位移响应与扭摆最大摆角响应的关系图Fig.10 Relationship between the maximum displacement response of spring oscillater and the maximum swing angle response of torsional pendulum
通过图10中拟合曲线可以看出,在扭摆摆角小于20.06°(0.35 rad)的范围内,可以把扭摆的最大摆角响应转化为冲击谱中具有物理意义的弹簧振子最大位移响应,并对中低频段的冲击谱进行测量与修正工作,且固有频率较高的扭摆保持线性区域的能力高于低频扭摆。
4.3 扭摆修正冲击谱趋势项误差
通过拟合出的线性段方程,可得到扭摆最大摆角响应与弹簧振子最大位移响应的关系。为验证该关系的准确性以及扭摆修正中低频冲击谱方法的可行性,取上述试验线性区间内弹簧振子、扭摆的测量值与冲击台台面加速度,通过Duhamel积分获得冲击响应谱,将EMD和最小二乘法联合修趋势项误差后的冲击谱进行对比,如图11所示。

表2 弹簧振子与扭摆最大响应关系拟合线性曲线Tab.2 Fitting curve of maximum response relationship between spring oscillator and torsional pendulum at sample point frequency

图11 弹簧振子、扭摆与EMD和最小二乘法联合修正中低频冲击谱图Fig.11 Middle and low frequency impact spectra corrected by spring oscillater, torsional pendulum, EMD and least square method
通过图11可以看出:EMD与最小二乘法联合修正、扭摆对冲击谱修正的结果,与弹簧振子对冲击谱结果较相似,三者相互印证修正了结果的准确性;在小摆幅下扭摆对冲击谱有较良好的修正与验证作用。由于该冲击台台面的横向固有频率约在2~3 Hz之间,修正后的数据在2~3 Hz间存在大于谱位移的现象。
5 结论
2)通过纵向冲击台冲击试验发现,本文提出的扭摆在采样点分别为6 Hz、10 Hz和20 Hz条件下且保证扭摆摆杆振动幅度在0~20.06°范围内,对中低频冲击谱的修正较合理,该修正数据通过与弹簧振子修正数据、EMD和最小二乘法联合修正数据,可互相印证修正结果,同时也验证了扭摆对修正中、低频冲击谱的可行性与准确性。
猜你喜欢
现代信息科技(2022年8期)2022-08-12
模具制造(2022年1期)2022-02-23
快乐语文(2021年35期)2022-01-18
中学生数理化(高中版.高考理化)(2021年1期)2021-03-19
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
学校教育研究(2018年4期)2018-10-21
新高考·高一物理(2016年10期)2017-07-07
旅游纵览(2015年8期)2015-09-25
物理教学探讨(2009年4期)2009-05-25
中学生数理化·高二版(2008年9期)2008-06-17
