现存高铁隧道衬砌裂缝检测方法的应用比较分析
2020-07-21 07:25喻晓豪
四川建筑 2020年1期
罗 蕊, 王 睿, 喻晓豪
(四川师范大学工学院,四川成都610068)
截至2018年底,我国高铁运营里程已达到2.9×104km以上[1]。在高铁隧道的建设和运营中,由于地质环境复杂、设计施工不够完善以及其他人为因素使隧道不可避免地发生病害。其中,裂缝是隧道衬砌最为常见的病害之一,当裂缝扩展到一定程度时,必将导致受力状态发生改变,致使结构破坏的机率增大,同时还可能引发渗漏水、结构冻害等表观病害[2-3]。防治裂缝的前提是及时、准确、快速地检测到裂缝的相关数据。目前检测裂缝的主要方法有雷达检测法、图像处理检测法、激光扫描检测法、超声波检测法、冲击弹性波检测法、光纤传感检测法,本文对上述检测方法从检测原理、检测效率以及应用优缺点进行了系统性分析和比较。
1 探地雷达检测
1.1 探地雷达检测原理
探地雷达主要利用不同的介质在电磁特性上的差异会造成反射回波在波幅、波长以及波形上有相应的变化这一原理。探地雷达系统通常由发射机、收发转换开关、接收机以及处理信号的主机等部分组成。在实际应用中,如图1所示,探地雷达在发射出电磁波后,可以通过信号接收装置对反射回波信号进行接收,并对该信号进行分析。通过分析其反射波谱的形状、频谱特征和反射时间等参数,进而得出检测裂缝的孔隙度、张开度、线密度等性质。
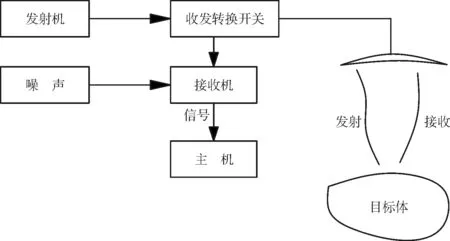
图1 地质雷达工作原理
1.2 探地雷达检测可行性分析
探地雷达是检测和识别地下目标的一种有效设备,其应用领域十分广阔,被广泛应用于岩土勘查、工程建筑结构勘查及生态环境探测等方面。具有以下优点:
(1) 直接成像,检测效率高:由于雷达反射波可以直接以图像的形式呈现,便于对目标物的结构和形态进行直接分析,提高检测效率;
(2) 按需匹配,应用范围广:探地雷达可以通过为不同的待检测裂缝匹配不同频率的检测天线来得出最佳检测结果;
(3) 无损检测:探地雷达采用了非接触式检测,不会对待测物本身造成损害;
(4) 结果精确:探地雷达对待测物体的检测精度达到了厘米级,能够满足现有大部分的检测精度要求。
1.3 探地雷达检测的局限性
探地雷达在实际应用中也存在一定的局限性:
(1) 干扰因素:由于探地雷达的工作环境并不单一,干扰因素(杂波和噪音)的存在降低了目标回波信号处理的效率,且为后期的目标回波处理带来了不必要的干扰;
(2) 探测深度受限:由于高频电磁波在介质中具有高衰减性,这种局限性可能会导致探地雷达在检测深度较大的裂缝时出现检测出现偏差或无法识别裂缝等问题。
2 图像处理检测法
2.1 图像处理检测原理
图像处理检测法在实际应用中先利用以CCD相机为核心部件的图像采集系统对隧道断面进行连续的信息采集,将光信号转变为电信号,然后经过A/D信号转换,再次将电信号转变为计算机可以识别的数字图像信息,输入计算机并存盘[6](图2)。再经过图像处理系统,提取出衬砌裂缝信息,如裂缝的范围,具体位置以及裂缝的走向、宽度等。

图2 图像处理检测法原理
2.2 图像处理检测法可行性分析
图像处理检测法是一种便捷高效、适用性强的裂缝采集方式,其优点如下:
(1) 无损检测:图像采集对待采集裂缝进行采集时(相机连续拍照)采用非接触式检测;
(2) 检测精度可调控:在进行图像采集的时,可以通过选取不同的图像采集器、或是采用不同的拍摄角度、增加额外的光源条件等方式来获取更加清晰的采集图像。除此之外,还可以采用不同的算法来提高图像处理的精度;
(3) 检测效率高:在进行图像采集时,可将图像采集器放置于匀速行驶的检测车上,大幅度的减少因为检测者操作不当所造成的误差。同时也可以最大限度地提高检测效率,减少检测时对周围环境的影响,增大检测的安全性。
2.3 图像处理检测法的缺点
但由于图像处理检测法在一定程度上依赖于后期算法对图像进行处理,因此该方法仍存在一定的缺点:
(1) 检测结果准确性有待提高:当后期图像处理后裂缝的灰度值与背景或噪音的差异较小且不易区分时,常会出现两种情况:一是图像背景的杂点或噪音极易在图像处理时被划为裂缝,二是将裂缝作为不需要的杂点或噪音去除;
(2) 缺少运算时间短,精度高的算法:大部分隧道裂缝自动检测系统都采取了在现场采集图像,然后将采集的图像进行离线处理的方法,这种处理方法耗时长,且不利于补测;
(3) 未完全实现自动化图像处理检测:图像处理检测法由于各种干扰物和渗漏水处产生的噪点对采集的裂缝图像具有一定的影响,导致在图像处理后的裂缝识别阶段,由算法处理后仍需借助人工识别从而达到要求精度。
3 三维激光扫描技术检测
3.1 三维激光扫描技术检测原理
三维激光扫描系统包含有三维激光扫描仪、点云数据处理平台、电源及其他附属配件。三维激光扫描系统的作用原理是:当检测车按照指定路线行进时,检测车上搭载的激光仪进行高速旋转,以发射出螺旋线形式的激光对待检测物体表面进行扫描。对接收到的信号进行分析得到有关数据之后,经计算得出待检测物体表面各点的三维坐标,由大量的点位置得出待检测物体表面的图像。由于隧道是一个空间结构,在对三维激光扫描点云数据进行处理进行三维模型重建时,需从全局和局部两个方面进行点云数据的分析和提取。再应用数字图像重建技术,对裂缝进行成像处理,实现对裂缝的真实再现。
3.2 三维激光扫描技术检测可行性分析
三维激光扫描由于其理论和应用技术均较为成熟,在实际工程中得到广泛的应用。其优点如下:
(1) 无损检测:激光检测时采用无接触表面检测,不会对被待检测物体造成损伤;
(2) 采样率高:相较于传统的检测方式,激光检测每站所测量的断面个数更多,且每个断面点的密度更大;
(3) 布点灵活:进行激光检测时,由于断面测量间隔相较于传统的检测方式(一般为大于5m)更短,且可以根据检测位置的实际情况调整测量间隔,对于情况较为复杂的部位可以设置较为密集(大于1m)的测站。
3.3 三维激光扫描技术检测的局限性
三维激光扫描技术也有其局限性:
(1) 检测误差:在检测时,由于仪器本身的制造误差或是激光扫描的测距、测量角度选取不当等原因,都会给测量结果造成一定的误差;
(2) 检测效率低:三维激光扫描通过数字图像重建技术建立模型,需要测量大量的三维点坐标,检测量与数据处理量极大。
4 超声波检测法
4.1 超声波检测原理
超声波在有缺陷的混凝土中传播时,会在缺陷部位发生反射、折射、散射等现象,导致声学参数发生变化。超声波检测法最常利用的两种方法就是正负波检测法和首波相位反转检测法。超声波接收波形会在其换能器间距在裂缝深度的两倍以内时发生变化,此时超声波接收波形的首波出现正波,而在裂缝深度两倍以外出现负波。根据这一性质,利用正负波计算出裂缝深度。首波相位反转检测法则是利用了当换能器置于裂缝两侧时与裂缝间距不同,会引起首波的波幅和相位的变化。
4.2 超声波检测法可行性分析
超声波检测法利用超声波的在介质中传播的声学参数对裂缝进行识别,其优点如下:
(1) 适用性强:当裂缝深度较小时,可采取首波相位反转法对返回信号进行分析计算,能得出较为精准的处理结果;
(2) 可操作性强:检测混凝土裂缝深度时采用不对称布置测点使测量时仪器的摆放更加灵活,提高了其可操作性;
(3) 对裂缝识别性好:声测裂缝其频率较高,指向性好,波在介质中传播时,在阻抗差异明显的界面上会发生反射、折射和波型转换[11]。
4.3 超声波检测法的局限性
超声波检测法由于其自身的性质所限制,也具有一定的局限性:
(1) 不具备普适性:当裂缝的深度增加,测距增大,负波的振幅下降很快,致使负波的测量平均误差增大。超声波频谱响应性能差[11],不适用于深度大且裂缝内填充情况较为复杂的情况;
(2) 检测效率低:由于裂缝内情况较为复杂,依据时声学参数的变化作为裂缝识别依据需花费大量时间处理数据。
5 冲击弹性波检测法
5.1 冲击弹性波检测原理
冲击弹性波作为一种应力波,一般由不同大小的激振锤激发,能量大且集中,能够穿透10m左右的混凝土。机械冲击引发的应力波包含了纵波、横波和应力波。应力波波前到达裂缝的混凝土-空气界面,由波阻抗差异导致波基本会被反射,形成反射波,此时应力波无法传递到裂缝的另一侧,混凝土质点不产生位移,接收点的传感器接收不到信号值。当混凝土中的应力波波前传播至裂缝最深极限位置时,既产生衍射现象,形成球形的衍射波。当球形衍射波第一次传播至接收端处时,引起混凝土表面质点发生位移,接收传感器所接收到的时域信号表现为振幅突变。
5.2 冲击弹性波检测可行性分析
冲击弹性波检测法通过分析应力波在裂缝处的混凝土-空气界面处发生的反射、衍射等传播现象,得出裂缝的基本信息。其优点如下:
(1) 频谱反应明显:冲击弹性波具有较高的能量,对于尺寸较小的裂缝也能识别,提高了裂缝的检测范围;
(2) 检测精度高:由于冲击弹性波波长较长,且频率较低,衰减缓慢,能够大范围使用且不受裂缝中填充杂质的影响。
5.3 冲击弹性波检测法缺点
冲击弹性波检测法在实际应用过程中也具有一定的缺点:
(1) 非无损检测:由于振锤在激发应力波时需对待测物体进行锤击,会对被检测物体表面造成一定的损伤;
(2) 检测效率低:由于冲击弹性波需采用振锤激发应力波,需在不同检测点重复进行操作,耗费时间长,检测效率低。
6 光纤传感检测法
6.1 光纤传感检测原理
光线传感器通常是由光传感元件、信号处理器、光导纤维、光源等组成的。光纤传感器主要利用了光波在光纤中传播时,光波的振幅、相位、偏振态、波长等,在外界作用因素的影响下发生改变。由于光纤极具敏感性,在有裂缝产生的地方会发生微弯,如图3所示,在微弯处,在光纤中传输的光会产生能量辐射。根据瑞利散射原理,可以通过对接收到的散射光进行分析,通过对分析出的光的衰减波形,从而得出裂缝的信息。

图3 光纤监测裂缝细部结构
6.2 光纤传感检测法可行性分析
随着光纤在实际生活中的普及,光纤传感检测法也得到了一定的发展,其优点如下:
(1)探测灵敏:光纤受到微小的外力作用时会发生微弯曲,使其传光能力发生很大的改变。这一性质不仅可以检测到裂缝的产生,还可以实时监控裂缝是否发展;
(2)抗干扰性强:光纤在工作时不受电磁或其他杂质的干扰,使其探测结果具有一定的准确性和可靠性;
(3)可探测距离长:光纤传感器网络可实现长距离铺设,加大了光线传感器网络的监测范围。
6.3 光纤传感检测法缺点
光纤传感检测法也存在着一定的缺点:
(1)成本高:光纤预埋时搭建光线传感器网由于其铺设的复杂性,增加成本;
(2)不易后期维护:由于光纤传感器网络埋于地下,且铺设线路十分复杂,在进行定期检查或后期维护时困难较大。
7 结论
本文分别从理论原理、可行性(优缺点)等方面对雷达检测法、图像处理检测法、三维激光扫描检测法、超声波检测法、冲击弹性波检测法、光纤传感检测法六种方法全面分析了如何检测现存高铁隧道的衬砌裂缝。分析发现,由于衬砌裂缝特点的不同,因此所采用的最佳检测方法也随之不同。
对于一般裂缝,探地雷达即可以进行检测;如果周围环境光线较为黯淡或其他外界条件相对较差,则可采用图像处理检测法;如果环境条件较复杂,三维激光扫描检测法会是比较合适的检测方法;超声波检测法适用于检测裂缝深度不大的情况;若是需要准确测得深度较大的隧道衬砌裂缝,则应该采用冲击弹性波检测法;若探测范围较大且相对不考虑经济成本可选用光纤传感检测法。
总体来说, 隧道衬砌裂缝检测的方式方法有待进一步完善, 且准确度、实时性、复杂性和普适性等方面还未达到满意的效果, 检测算法尚存在精度与速度的矛盾。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
建材发展导向(2021年19期)2021-12-06
科技研究·理论版(2021年20期)2021-04-20
内蒙古科技与经济(2021年3期)2021-03-09
雷达学报(2021年1期)2021-03-04
电子制作(2019年15期)2019-08-27
电子制作(2018年18期)2018-11-14
航天电子对抗(2017年6期)2018-01-22