基于多目标约束三维水平井轨道优化设计研究
2020-07-21 01:56王六鹏高云文张燕娜陈联国
钻采工艺 2020年1期
王六鹏, 魏 磊, 高云文, 张燕娜, 陈联国, 张 明
(1西安石油大学石油工程学院 2中国石油渤海钻探工程有限公司第二钻井工程分公司>3中国石油长庆油田分公司油气工艺研究院 4中国石油川庆钻探工程有限公司长庆钻井总公司)
三维水平井在薄层油气藏、低渗透油气藏等特殊油气藏开发中具良好效果[1-4]。井眼轨道优化设计不仅可降低工程施工困难而且可进一步提高油藏开发效益。常规优化设计方法是给定地质靶点坐标要求设计轨道准确穿越靶点,然而由于靶点位置及工程条件的制约,往往难以寻找一条既满足工程约束又准确入靶的最优轨道。目前国内外众多学者提出了三维水平井井眼轨道优化设计模型[5-7],庞明越等针对渤海油田建立了以井眼轨道长度最短为目标的“直—增—稳—边增边扭—水平段”型水平井轨道优化设计模型[8],闫吉曾从基本公式和靶点约束方程出发,推导了轨道参数计算公式,建立了“直—增—扭—稳—增—平”的三维水平井轨道设计[9]。胥豪等人建立了以靶点为等式约束的六段制三维水平井优化设计模型[10]。李伟等人针对涪陵地区页岩气田三维水平井的特点,建立了七段式轨道优化设计模型,通过井斜角方位角组合,确定最短井深的优化轨道[11]。虽然众多学者对三维井眼轨道设计展开深入研究,但是往往难以寻找一条既满足工程约束又准确入靶的最优轨迹,实际设计时是通常为调整靶点坐标后重新设计,需耗费大量人力及计算工作。
针对这一问题,本文将给定地质靶点坐标与设计轨道入靶点坐标差的平方和定义为入靶精度,认为设计轨道满足给定入靶精度即为有效,提出满足入靶精度条件下最优井眼轨道设计思路。以入靶精度及最短设计井深作为双优化目标函数,以造斜段造斜率和扭方位段全角变化率作为工程约束,以“直—增—稳—增扭—稳—水平段”五段制三维水平井轨道作为设计剖面,建立基于多目标约束三维水平井轨道优化设计模型,并应用该模型对实钻井眼轨道进行了优化设计,可在满足要求条件下减少水平井眼轨道长度,能够有效指导井眼轨道优化设计工作。
一、三维轨道优化设计模型的建立
1. 设计思路
水平井轨道设计的难点之一在于要求井眼位置不仅进入目标窗口,而且井眼方向要与目标段设计方向一致[12]。“直—增—稳—增扭—稳—水平段”五段制三维水平井轨道优化设计如图1所示,当给定地质首靶点T、末靶点T′坐标参数后,水平段井眼轨道方向可由TT′唯一确定。当给定首靶点T处的入靶精度为e(e≥0)时,此时水平段入靶范围为以T点为圆心、e为半径的空间圆,而水平段靶体为由T±e和T′±e所构成的空间圆柱体。此时,在满足工程约束条件下的水平段穿越该空间圆柱体并与其方向一致的井眼轨道即为有效井眼轨道,而此时满足这一条件并具有最短井深三维水平井眼轨道即为最优。
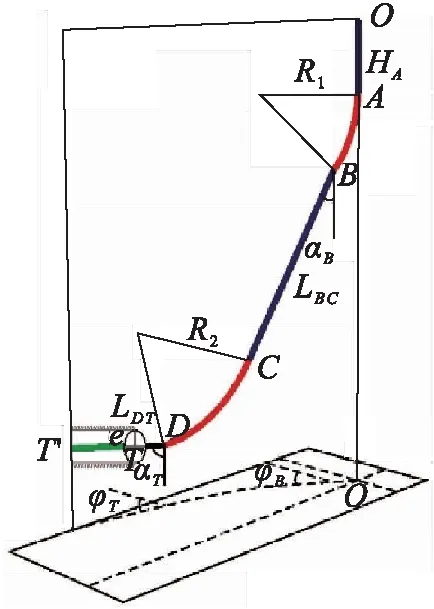
图1 五段制三维水平井轨道优化设计示意图
图1中,水平段长为首靶点和末靶点线段TT′长度,水平段方向可用T点的井斜角和方位角为αT、φT表示。OA为垂直段,A点为造斜点,其垂深为HA;AB段为造斜段,造斜半径以R1表示,造斜末点B处的井斜角和方位角为αB、φB;BC段为造斜后稳斜段,长度为LBC;CD段为增斜扭方位段,为一空间斜面圆弧,该空间斜面圆弧的半径用R2表示,增斜扭方位末点D处的井斜角、方位角与首靶点T处的井斜角、方位角相同;DT为增斜扭方位后稳斜段,长度为LDT。
1.1 已知定靶点坐标时水平段方向的计算
在井眼轨道设计之前,根据地质给定井口坐标,首靶点及末靶点坐标参数,计算出水平段方向,可用首靶点T处的井斜角及井斜方位角表示,如式(1)、式(2)所示[13-14]。
(1)

(2)
式中:NT、ET、HT、NT′、ET′、HT′—分别为首靶点T和末靶点T′的北、东和垂深坐标,m;αT、φT—首靶点T处的井斜角、方位角,°。
1.2 已知造斜率时造斜半径的计算
造斜段或增斜扭方位段造斜斜面圆弧半径依据造斜工具造斜率来确定,当给定造斜率时计算公式如式(3):
(3)
式中:R—造斜半径,m;K—给定造斜工具造斜率,°/30 m。
1.3 待优化设计参数
在本文建立的“直—增—稳—增扭—稳—水平段”五段制水平井轨道优化设计中,已知参数有:井口坐标及首靶点T、末靶点T′坐标参数。待优化设计参数有:造斜点垂直深HA;增斜段造斜率K1;增斜段末井斜角、方位角αB、φB;造斜后稳斜段长度LBC,增斜扭方位段狗腿度K2,增斜扭方位段后稳斜段长度LDT。当这些未知参数确定后,可唯一确定一条五段制三维水平井设计轨道。
2. 优化设计模型
为了便于计算,待优化设计参数记为x1=HA、x2=R1、x3=αB、x4=φB、x5=LBC、x6=R2、x7=LDT。针对“直—增—稳—增扭—稳—水平段”五段制三维水平轨道,分别建立以最小入靶精度和最短井深双目标函数的最优化轨道设计模型,如式(4)所示。

(4)
在式(4)中,第一优化目标函数F1为最小入靶精度,第二优化目标函数F2为最短井深。显然,目标函数F1在无约束条件下极小值为0,而满足次条件的最优解为准确穿越首靶点T的设计轨道,然而在三维轨道优化设计中存在实际工程约束,此时难以找到满足目标函数F1极小值。
因此给定入靶精度为e(e≥0)后放宽目标函数F1极小值位于F1≤e范围内,此时最优解为由|X1*| +ε所构成的邻域范围,在该邻域范围应用优化目标函数F2即可得到最短轨道长度。每段轨道的坐标参数及井深计算见式(5)~式(9)。

(5)

(6)
(7)
(9)
其中,所有未知参数为不等式约束,取值范围可根据工程实际约束条件或工程经验确定,如(10)式所示:
(10)
3. 优化设计模型的求解
本文所提出的三维轨道优化设计模型为多目标优化问题[15],此类多目标优化问题的数学模型为[16]:
min[F1(X),…,Fi(X)] (i≥2)
(11)
s.t.Xmin≤X≤Xmax
式中:X=(x1,x2,…,x7)—待优化设计变量;
Fi(X)—按照重要程度从高到低排列的优化目标函数,其中约束为待求解变量的上下限方程。
宽容分层法是求解多目标优化的有效方法之一,该方法的主要求解思想是将上一步最优解进行宽容后再代入到下一步优化求解,逐步求解每个目标函数最优解最终求得满足所有目标函数的最优解。
第一步,将目标函数F1的极小值用给定的入靶精度e(e≥0)扩大后优化求解,此时最优化方程如式(12)所示。
(12)
s.t.Xmin≤X≤Xmax
求解式(12),得到的最优目标函数为F1*≤e,最优解为由|X*|+ε所构成的邻域范围。
第二步,根据第一步求出的最优解邻域来定义优化目标函数F2的定义域,即:
(13)
s.t.X*-ε≤X≤X*+ε

二、实例验证及分析
针对文献[2]中的渤海油田F30H井参数采用本文提出的“直-增-扭-稳-增-平”进行三维水平井优化设计。已知首靶点T的坐标参数为NT=84.84 m,ET=1 212.57 m,HT=1 510.95 m,末靶点T′的坐标参数为NT′=-141.14 m,ET′=1 626.58 m,HT′=1 509.97 m;计算出首靶点井斜角和方位角分别为αT=90.12°、φT=118.52°;给定入靶精度e为0.5 m。
根据工程条件,给定增斜段造斜率K1为(2°~4°)/30 m;增斜扭方位段狗腿度K2为(2°~3°)/30 m;依据工程经验,给定造斜点垂深范围为100~200 m;造斜末点B井斜角和方位角范围分别为0~100°、0~360°;两段稳斜段长度范围为0~2 000 m。
应用优化方法求解后,得到优化设计结果为:HA=130 m、K1=3.368°/30 m、αB=37.23°、φB=73.2°、LBC=968.5 m、R2=2.885°/30 m、LDT=0 m,实际入靶精度e=0.3085 m,最优井眼轨道长度为2 576.49 m。优化的结果见表1。

表1 三维水平井轨道剖面优化结果数据表
与文献[2]结果对比可知,最短井眼长度两者相差不大。文献中造斜段AB的造斜率及扭方位段CT的狗腿度分别为3°/30 m和2.95°/30 m,本文计算出的造斜率及狗腿度分别为3.368°/30 m和2.885°/30 m,本文最优井眼轨道在入靶前的扭方位段具有更小的造斜率,利于施工作业。
三、结论
(1)针对“直-增-稳-增扭-稳-水平段”五段制井眼轨道优化设计方法,以入靶精度和最短井深作为双优化目标,以造斜段造斜率和扭方位段全角变化率作为约束条件,建立了多目标约束的三维水平井轨道优化设计模型。
(2)通过对本文所建立的模型与文献对比可知,本文所提出模型不仅满足靶点位置不确定性要求,同时在造斜段和扭方位段的狗腿度更小,优化设计的轨道更加平缓。
(3)本文所提出的优化轨道设计模型具有良好的应用型,同时对于其他相同类型轨道优化设计工作具有借鉴意义。
猜你喜欢
结构工程师(2022年2期)2022-07-15
承德石油高等专科学校学报(2022年2期)2022-05-18
食品与健康(2021年7期)2021-08-16
中国典型病例大全(2021年15期)2021-01-10
石油钻探技术(2020年4期)2020-10-09
河北理科教学研究(2020年2期)2020-09-11
空间科学学报(2020年4期)2020-04-22
石油钻探技术(2020年4期)2020-01-08
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25