四足机器人工程特性冲突消解方法
2020-07-22 07:56路可欣秦建军
工业工程 2020年3期
路可欣,秦建军,高 磊
(北京建筑大学 1. 机电与车辆工程学院;2.城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
在产品设计初期,对工程特性冲突消解的研究可有效地提高用户满意度,这已成为国内外学者关注的重点[1-3]。为解决此问题,国内外学者对质量功能展开(quality function development, QFD)与TRIZ集成的方法进行了研究,通过质量功能配置和发明问题解决原理的结合,实现用户需求向工程特性的转化,克服产品设计中的矛盾冲突[4]。张彩丽等[5]针对TRIZ对工程特性确定能力不足的问题,有机融合TRIZ与QFD各自优势,实现了多种设计问题的确定与创新解耦的方法。为进一步解决多层级工程特性冲突问题,Vinodh等[6]利用QFD获取用户需求并转化为工程特性,针对不同工程特性冲突对,实现多层级工程特性的冲突消解。
四足机器人因其较强的灵活性与环境适应性等特点,得到了国内外学者的普遍关注。西班牙教育研究院研发的SILO4机器人[7]每条腿配有3个回转关节,并安装了编码器、倾角计以及三轴力传感器,因此可适应多种地形。上海大学研发的小型电动直驱四足机器人[8]采用内倾腿部关节配置,消除等效横滚髋关节与俯仰髋关节间距,使稳定性得以提升。为进一步提高机体灵活性,日本电气通信大学研发的Tekken-Ⅳ仿生四足机器人[9]采用非柔性的机械结构,该结构使运行更加灵巧。相比于电动四足机器人,液压四足机器人因其驱动功率密度高、结构紧凑等特点,被广泛应用于野外非结构化环境下。韩国工业技术研究院研发的P2机器人[10]采用液压马达带动关节旋转,消除了由直线运动转化为转动时的非线性,控制相对简单。在改善机体轻量化方面,美国麻省理工大学的猎豹机器人[11-12]采用腿部关节与脊柱关节的仿猫科类构型,结构更合理精细。但在四足机器人的设计中,也存在着工程特性间的冲突与制约现象,例如较大的承载重量会使机器人在野外战场发挥重要作用,但与此同时会造成足端冲击损坏与动能的损耗。另外,腿部关节数量的增加使机器人运转更加灵活,但会提升控制难度。除此之外,改进机体轻量化的同时,也会造成机器人行进步态的单一化。
四足机器人不同于普通产品,机器人作为新兴产业且其结构相对复杂,大部分学者对其研究还是集中在算法与数学模型的建立上[13-15],而针对液压四足机器人中存在的工程特性冲突问题,本文提出了集成质量屋、发明问题解决原理与定量优先度分析法,利用质量屋对存在负相关的工程特性进行汇总,基于加权欧氏距离对创新方案进行遴选,运用发明问题解决原理分别从物理冲突与技术冲突两方面对其进行消解,同时对液压四足机器人进行结构创新。
1 集成方法总体设计思路
四足机器人按驱动方式可分为液压驱动、气压驱动以及电机驱动3种,其特点各不相同,具体如表1所示。在野外的非结构化地形下,液压四足机器人被广泛应用,但通过众多国内外学者的研究,在液压四足机器人的设计中,均存在工程特性冲突的现象,如表2所示。

表1 四足机器人3种驱动方式Table 1 Four-legged robot’s three driving methods

表2 液压四足机器人现存问题Table 2 Hydraulic four-legged robot’s existing problems
本文采用质量屋、发明问题解决原理与定量优先度分析的集成方法对该问题进行消解。其中质量屋是以液压四足机器人需求为导入,采用质量屋矩阵表将需求转化为工程特性,关键需求与工程特性进行有效挖掘。定量优先度分析法通过设计者综合考虑多方面要求,对性能指标进行权重赋值,进而遴选最优创新方案。发明问题解决原理基于无折中的设计思想,通过科学发明原理、冲突矩阵与分离原理等方法,为液压四足机器人工程特性的消解提供具体的创新思路,并实现满足要求的结构创新方案,其具体流程如图1所示。
2 液压四足机器人工程特性冲突
2.1 质量屋
质量屋(house of quality, HoQ),又称质量表,是质量功能展开的核心工具,采用质量关系矩阵,将用户需求转化为产品工程特性所采用的类似于房屋结构关系矩阵作为技术工具,如图2所示。

图1 液压四足机器人工程特性冲突消解与结构创新设计流程图Figure 1 Hydraulic quadruped robot's engineering characteristics conflict resolution and structural innovation design flow chart

图2 质量屋Figure 2 House of quality
通过组建QFD专家团队对用户需求进行汇总,采用1—5比例标度法对需求重要度及用户需求与工程特性的相关矩阵进行打分,其中工程特性重要度的定义式为

式中,Ci为用户需求重要度,Vij为用户需求与工程特性间的相关程度。
质量屋屋顶的自相关矩阵代表各工程特性之间的关系,正号表示若提高或改善其中某一工程特性,将对另一工程特性有改进作用,则称两工程特性之间存在正相关。反之,负号将对另一工程特性有恶化作用,则称两工程特性之间存在负相关。
2.2 非结构化环境下的工程特性冲突
从液压四足机器人研究人员、潜在用户方、相关领域专业人员中分别选取2名成员,由这6名成员组成QFD评价组。经过从不同角度的探讨,该评价组确定了4项需求、16项子需求以及8项工程特性,其中包括外部构型(整机尺寸、机体重量)、内部构型(空间尺寸、关节数量)、使用性能(运动稳定性、机动能力、结构强度、承载重量),利用式(1)确定工程特性重要度,并进行归一化,得到相对工程特性重要度,完成质量屋的数据输入,结果如图3所示。实现需求到工程特性的定量转化,将需求的语言表达转变为工程特性,为优化液压四足机器人结构奠定了坚实基础。
由图3所示的液压四足机器人自相关矩阵,可得到3组负相关设计特性,据此确定液压四足机器人的3组设计关键问题,即工程特性冲突问题:1) 消解“机体重量”与“承载重量”之间的工程特性冲突;2) 消解“运动稳定性”与“关节数量”之间的工程特性冲突;3) 消解“结构强度”与“机体重量”之间的工程特性冲突。
3 液压四足机器人工程特性冲突消解
3.1 发明问题解决原理
发明问题解决原理由前苏联著名发明家Altshuller在1946年创立的,TRIZ是俄文的音译缩写。利用长期累积的经验和知识,处理产品中工程特性冲突并实现创新设计,使已有问题有章可循。TRIZ理论的一般流程如图4所示。首先,将实际问题通过39个特征参数转化为TRIZ问题,再利用矛盾矩阵或者发明原理得到TRIZ问题的一般解,最后,结合已有知识,将一般解转化为最终解,同时生成创新方法。

图3 液压四足机器人质量屋Figure 3 Hydraulic four-legged robot's quality house
3.2 基于TRIZ理论的的工程特性冲突问题转化
根据3组液压四足机器人负相关工程特性及其设计关键问题,构建TRIZ的通用工程参数,如表3所示,将液压四足机器人设计关键问题中的冲突运用通用工程参数代替负相关设计特性,从而实现将工程特性冲突转化为TRIZ的一般问题。表中第3列的数字表示TRIZ理论共有40个原理,例如“2.静止物体的重量”,表示第2条原理是静止物体的重量。
3.3 创新方案的定量优先度分析
邀请10名QFD团队专家,其中包括研发、设计、制造、质量管理、工艺等多领域不同成员,根据工程特性间的冲突,从各个角度共同拟定创新方案,进行初步粗选与综合分析,优先度大小决定了方案的优劣程度。

图4 TRIZ理论一般流程图Figure 4 TRIZ theory general flow chart

表3 液压四足机器人负相关工程特性以及TRIZ理论通用工程参数Table 3 Negative correlation engineering characteristics of hydraulic quadruped robot and general engineering parameters of TRIZ theory
3.3.1 基于改进模糊层次分析法的权重分析
由于QFD团队专家的主观性与客观事物的复杂性,在多种创新方案的遴选中存在模糊性问题。本文采用改进模糊层次分析法对创新方案的权重进行分析,其具体步骤如下。
Step 1采用0,0.5,1三标度法,建立互补型模糊判断矩阵,W=(wij)n×m,其定义式为

Step 2求行和,其定义式为

将模糊判断矩阵W=(wij)n×m转化为模糊一致性判断矩阵L=(lij)n×m,其转化定义式为

Step 3将行和归一化求解排序向量K,其定义式为

Step 4排序向量K的值,即为评价指标权重。
3.3.2 基于加权欧氏距
离的创新方案遴选
n维 欧氏空间为点集合,其中每个点可表示为[x(1),x(2),···,x(n)],其中x(i), (i=1,2,···,n)表 示x的第i个 坐标,x与y两点距离为q(x,y),其定义式为

设wi为权重值,且满足则加权式距离定义式为

设创新方案Ej=[Ej1,Ej2,···,Ejm],对创新方案Ej的性能等级分为4级,其量化结果如表4所示。

表4 等级量化结果Table 4 Level quantification result
分别对目标设计U=[u1,u2,···,um]与多种创新方案Ej=[Ej1,Ej2,···,Ejm],(Ej∈E, 1≤j≤l),通 过 加 权欧氏距离公式,计算二者间距离,其定义式为

方案的优先度 εj越大,表示该创新方案优先度越高,优先度 εj的定义式为

3.4 液压四足机器人创新方案遴选
对液压四足机器人已有设计方案E1、E2、E3进行逐一评价,邀请的10名QFD团队专家分别以“机动”、“承载”、“防护”为评价指标,对设计方案进行权重分析,具体步骤如下。
Step 1:通过式(2)建立互补模糊判断矩阵

Step 2:通过式(3)与式(4)建立模糊一致性判断矩阵

Step 3:通过式(5)求解排序向量

根据排序向量K可知,“机动”、“承载”、“防护”权重系数分别为0.33、0.17、0.5,对3种创新方案进行量化处理,如表5所示。

表5 3种创新方案量化结果Table 5 Three innovative solutions' quantifying results
通过计算式(8)与式(9),3种创新方案优先度分别 为 ε(E1)=0.556 、ε(E2)=0.392 、ε(E3)=0.184,由以上结果可知E1为最优创新方案。
4 液压四足机器人创新方案结构设计
4.1 液压四足机器人机架设计
针对第1组工程特性冲突,即“机体重量”与“承载重量”之间的冲突。若液压四足机器人的承载重量增大,可大大增加物资储备量,如有利于在交通不便的地区为士兵运送弹药、食物以及其他物品,但会增加整体负重,给运输带来不便。因此,机器人整体重量要尽可能的小,以方便在野外非结构化环境中能够运输更多的物品。故该组工程特性属于技术冲突,可通过TRIZ理论冲突矩阵以及相关的发明原理进行液压四足机器人第1组工程特性的消解,针对本案例,选择No.14与No.35原理,如表6所示。
根据表6,采用创新方案E1对液压四足机器人的机架结构进行设计,如图5所示,机架采用镂空设计,大大降低了机体重量,同时机身内部采用分区设置,减少不同类别物品间的交叉。机体内部储物A区为少数流动最频繁的物品,实现快速的调取能力。机体内部储物B区为常规储存物品,为野外作战人员提供生存必需品,机身内部实现了空间的解构,使其最大化利用。除此之外还可将运输物品悬挂至机身两侧,提高整体载物效率。躯干主要采用具有良好机械性能的铝合金材料,强度高,满足机器人对不同环境下的材料性能要求,具有较强的适应性。
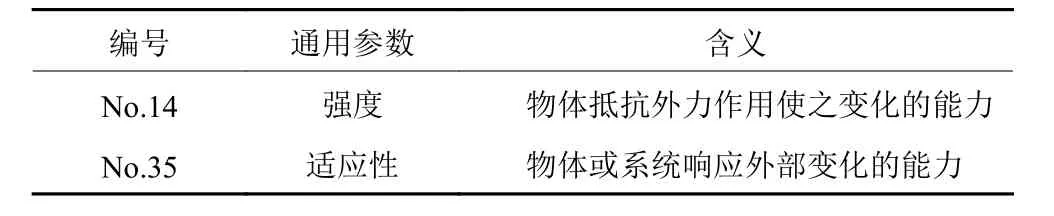
表6 No.14与No.35的通用参数含义Table 6 General parameters' meanings of No. 14 and No. 35

图5 液压四足机器人机架结构设计Figure 5 Hydraulic four-legged robot’s frame structure design
4.2 液压四足机器人腿部结构设计
针对第2组工程冲突,即“运动稳定性”与“关节数量”之间的冲突,液压四足机器人在野外的复杂环境下,需具备较高的机动、感知以及防护等多方面能力,导致机体内元件繁杂,存在冗余关节数量的问题,因此在液压四足机器人腿部设计中应尽可能减少非核心移动关节。
故该组工程特性属于技术冲突,可通过TRIZ理论中的冲突矩阵以及所相关的发明原理进行液压四足机器人第2组工程特性消解,针对本案例,选择No.7与No.13原理,如表7所示。
根据表7,采用创新方案E1对液压四足机器人腿部进行设计,每条单腿含有3个液压执行器和一个减震弹簧,如图6所示,腿部结构相对简单,不存在冗余关节,使其机体体积进一步减小,结构紧凑,减震弹簧可对足端触地过程中的冲击力有一定吸收作用,减轻崎岖路面对物资造成的颠簸与冲击,进一步提升机器人的运动稳定性,同时满足了整体结构造型的设计要求。其中一个液压执行器为一个主动自由度,被动自由度由减震弹簧与直线轴承构成,增强机器人在运行过程中的稳定性,使结构设计更加合理。
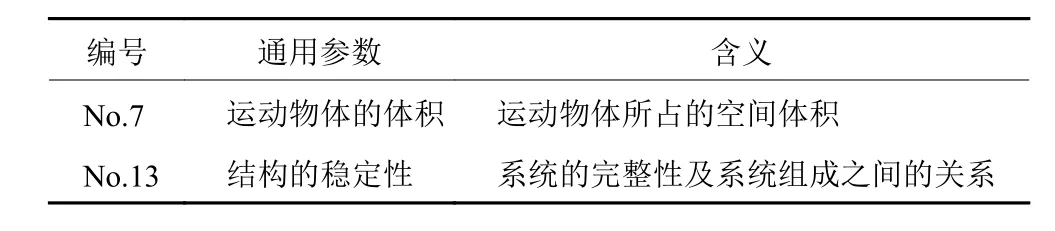
表7 No.7与No.13的通用参数含义Table 7 General parameters meanings of No. 7 and No. 13

图6 液压四足机器人腿部结构设计Figure 6 Hydraulic four-legged robot's leg structure design
4.3 液压四足机器人整体骨架结构设计
针对第3组工程特性冲突,即“运行速度”与“机体重量”之间的冲突,液压四足机器人的运行速度是其在野外非结构化环境中灵活应对的关键,但较大的机体重量,会使机器人前行缓慢,降低对环境变化的反应速度。因此,应尽量减轻机体重量,以提升其整机运行速度。
故该组工程特性属于物理冲突,可通过TRIZ分离原理中的整体与部分分离原则实现工程特性冲突的消解,针对本案例,选择No.6与No.40原理,如表8所示。

表8 No.6与No.40的通用参数含义Table 8 General parameters meanings of No. 6 and No. 40
根据表8,采用创新方案E1对液压四足机器人的整体骨架结构进行设计,如图7所示,采用复合材料,腿部与机体相连,为了保证强度同时便于安装,采用超硬铝合金型材料作为机体框架,同时腿部采用刚性材料,更好适应足端对地面的冲击,腿部与躯干通过侧摆关节相连,基节和大腿通过髋关节相连,小腿与大腿通过膝关节相连,当机器人垂直跳跃时,不仅可以储存一定势能,还可以保证整体的抗冲击载荷能力,实现了多用性原理,机体空间合理,结构紧凑,可适应大多地形,同时保证其运行速度。

图7 液压四足机器人整体骨架结构设计Figure 7 Design of the overall skeleton structure of hydraulic four-legged robot
通过依次对3组工程特性冲突进行消解,得到了液压四足机器人优化设计方案,该方案机体结构紧凑,改进了传统四足机器人单一悬挂式运输方法,采用悬挂与内储并存模式,提高了机器人整体的物资储备空间。利用TRIZ对其中存在的工程特性冲突进行消解,相对于传统依赖设计者直觉与经验的设计方法,TRIZ更加科学有效地消解冲突。同时,整机采用不同的材料设计,可适应野外多变的气候环境,减轻在行进过程中受到的冲击与振动,提高了机器人整体性能。
5 结束语
本文采用质量屋、TRIZ理论与定量优先度分析的集成方法,解决了产品设计中的工程特性冲突,形成满足要求的机器人结构优化方案。这种集成设计方法应用质量屋发掘用户需求,基于加权欧氏距离对创新方案进行遴选,运用TRIZ理论解决产品工程特性的冲突问题,最后形成满足要求的液压四足机器人结构创新方案。该集成设计方法在一定程度上弥补了单一产品设计理论的局限性,消解工程特性冲突问题,有助于企业尽快研发出适应市场需求的产品,通过液压四足机器人的创新方案分析,优化设计流程,为产品设计提供了新的研究方向。
猜你喜欢
一重技术(2021年5期)2022-01-18
中老年保健(2021年7期)2021-08-22
保健医苑(2020年1期)2020-07-27
重型机械(2020年2期)2020-07-24
海峡影艺(2019年1期)2019-06-24
数学物理学报(2019年1期)2019-03-21
柴油机设计与制造(2018年3期)2018-10-13
凿岩机械气动工具(2017年3期)2017-11-22
中国铸造装备与技术(2017年3期)2017-06-21
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16