
植物多功能自动维护系统研究与设计
2020-07-22 09:54洪耀球
电脑知识与技术 2020年11期
洪耀球
摘要:为解决传统温室大棚需要人力资源过多,现有智能温棚系统管理精细程度不够,不能完全取代人工,实现植物种植培育过程中的精细化智能管理等问题,研究了一个植物多功能自动维护系统,系统由机器园丁端、温棚环境监控端、服务器端构成。使用温湿度传感器、光照度传感器、色彩传感器、红外避障传感器,实现对温棚内植物生长环境、条件的自动监控,查找生长异常的植物,并进行补水、喷药等处理,同时具备机器园丁自动加水、加药,自动寻光充电等功能。系统通过无线收发模块完成数据传递,应用SQLite数据库技术存储实时信息,并可通过本地、手机网络实现远程控制。
关键词:精细化管理;机器人;环境监控;自动补给
中图分类号:TP277 文献标识码:A
文章编号:1009-3044(2020)11-0034-03
1背景
目前,物联网技术发展十分迅速,以计算机技术、自动控制技术为基础的物联网技术在农业领域得到越来越广泛的应用。传统的农作物生产方式,由于它们自身的缺点,无法改善种植效率,逐步被历史淘汰,人们试图找到完全解放人力资源,更加高效的农作物生产方式。随着农业信息水平的不断提高,以及物联网的持续发展,人们开始利用信息技术来提高农业生产效率,智能温棚在农业生产领域不断得到应用,构成了我国现代农业的主力军。
目前,市场上的智能大棚改良了传统的农业种植方法,节约了部分劳动力,实现了农业生产规模化管理和作物的智能化技术监测。但是,现有的智能大棚只能对植物的生长进行大规模、粗放式的监测,不能对个别植物的缺水、病虫害、果实成熟程度等进行详细的监测,生产者也不能通过诸如智能手机之类的移动设备进行远程控制,还不能完全取代人工作用。为解决上述问题,设计了一套植物多功能自动维护系统,不仅继承了传统智能大棚的监控、调整、实时信息反馈等优势,还专门开发了机器园丁,按照特定路线,对植物个体进行生长情况监测,对生长异常的植物及时补充水分、喷洒农药,并自动进行水、药、电力补给,完全模仿真实生产者的工作行为,实现完全自动控制。
2系统架构
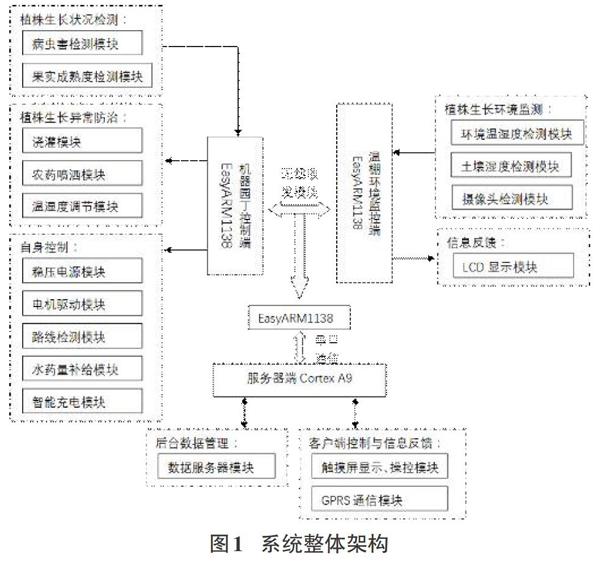
系统由机器园丁端、温棚环境监控端、服务器端三部分组成,三部分均使用EasyARM1138开发板外接相应模块进行通信和控制,主要包含温湿度环境监测、病虫害、成熟度植物生长监测、机器人浇水喷药、自动加水加药充电补给、无线通信等17个基本模块,共同完成农作物生长环境监测、生长异常状况检测处理、机器园丁自身操控、温棚监控信息反馈等功能,具体架构关系如图1所示。
3温棚环境监控端
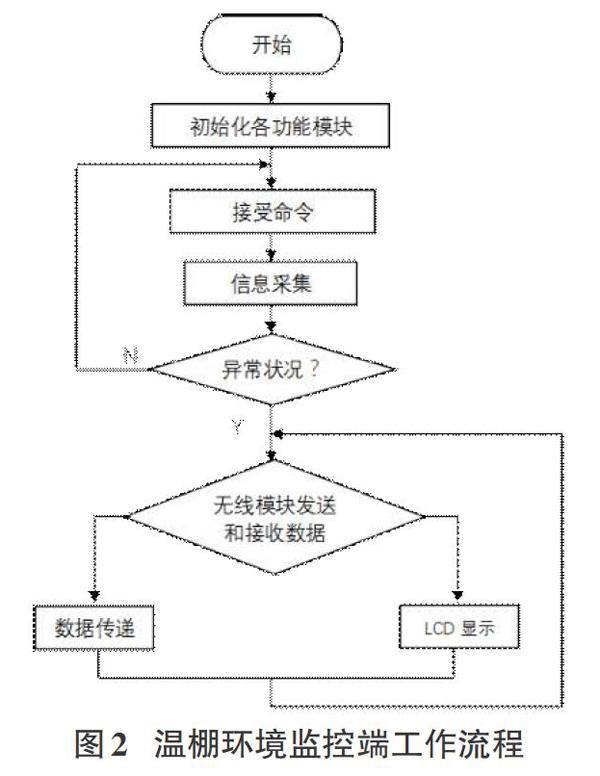
温棚环境监控端通过环境温湿度检测模块采集土壤和环境温度湿度信息,并经过EasyARM 1138进行先期处理后,再利用NRF无线传感器模块将有关信息发送到机器园丁控制端,以控制机器园丁进行各种监控和异常处理工作;液晶屏显示温棚温度和湿度信息;摄像头可以远程视频监控。所有信息将实时发送到服务器端进行统一处理。温棚环境监控端子系统工作流程如图2所示。
4机器园丁控制端
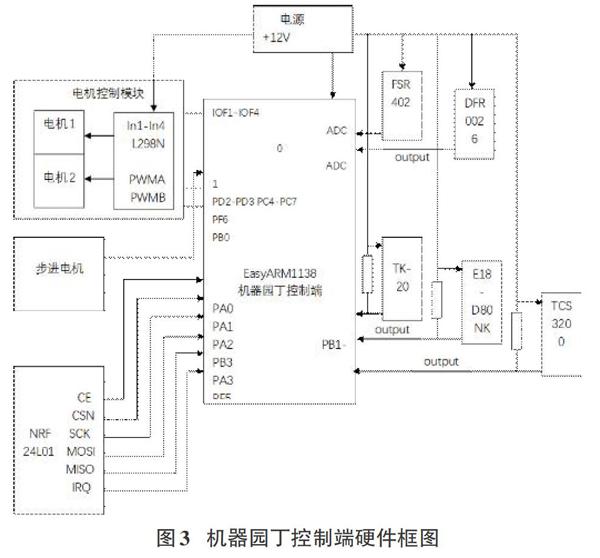
机器园丁接收来自温棚环境监视终端的信息和来自服务器的信息,经由黑白线检测传感器进行跟踪,按照设定的路径在温棚内移动,监视并检测农作物的成长环境。通过温湿度传感器、色彩传感器实时掌握果实成熟程度和害虫情况,根据实际需要灌溉,完成喷洒农药等工作。检测和操作信息首先由EasyARM 1138处理,然后通过无线传感器模块和虚拟串行端口传递到服务器。当机器人缺少水和药物时,它会自动补充,并重新回到水和药物断点继续操作。当电力不足时,可以自动检测足够的光源,并且可以使用太阳能电池面板充电。如果没有足够的光源,则警告自动被反馈给服务器和用户的智能手机。然后它自动返回出发点,等待用户的手动充电。图3为机器园丁控制端硬件框图。
5传感器模块
系统使用环境温湿度传感器、环境光线传感器、色彩传感器、压力传感器、黑白线传感器、红外避障传感器等来实现植物种植培育过程中数据监测、动作执行、信息传递等动态管理工作。
5.1黑白线传感器
采用TK-20黑白线检测传感器实时进行轨道检测,使机器人按照设定好的路线移动。实现方式:在机器人的移动路线中间设置3 cm的黑线,指引机器人按照正确的路线移动及操作,避免机器人出现比较大的路线偏移。机器人的本体采用无舵机双驱动器履带车。在履带车中间间隔3厘米安装两个TK-20黑白线检测传感器。以履带车视角为基准,左边传感器是TK(左),右邊传感器是TK(右)。具体寻迹方式如表1所示。
5.2红外避障传感器
为了能让机器人停留在正确的位置,系统使用了E18-D80NK红外线避障传感器来实时检测农作物位置。
实现方式:在履带车体的两侧,分别安装2个传感器,以履带车视角为基准,左侧传感器是E18(左),左侧传感器是E18(右)。利用红外避障传感器上的电位调节旋钮调整适当的检测距离。只要检测到农作物与传感器之间的距离在指定的距离范围内时,则判定有农作物,机器人停留、操作。并且机器人每次转向后,都会启动转向侧红外避障传感器,关闭另一个红外避障传感器,两个传感器交叉打开关闭,以便使所有的植物都能被检测到。具体判定方法如表2所示。
5.3色彩传感器
使用TCS3200色彩传感器,检测病虫农作物,识别成熟挂果作物。
TCS3200是通过将彩色光转换成不同频率,达到识别色彩目的。用于判别静态物体颜色,不同颜色输出不同频率。可以通过利用S2和S3的不同组合来选择,共有红、蓝、绿、无信息等四种滤波器类型。如表3所示。
通过测量3个参数R、G、B的频率值,可以识别当前农作物的颜色,绿色是正常的作物,黄色是病虫害的作物,红色是有成熟挂果的作物。
5.4环境光线传感器
DFR0026环境光线传感器用于检测周围光照强度,以此判断是否有可用的光源为机器人充电。环境光线传感器采用环境光电二极管,传感器输出电压随光照强度变化,光照越弱,输出电压越低,光照越强,输出电压越高。机器人会检测光线传感器输出值,当输出电压较高,达到充电需要的光照度,就启用电力控制模块的自我充电功能,通过安装在机器人上的太阳能电池面板给电池充电。如果不符合要求,则回到起点,向服务器及生产者移动手机发送报警信息,等待手工充电操作。
5.5压力传感器
为判断机器人附带的水(药)罐容量,系统使用FSR402电阻压力传感器进行测量。检测原理是将压力传感器置于水(药)罐下,FSR传感器会把施加到传感器的膜区域的压力转换为电阻值,电阻输出值因压力而变化。水(药)罐的剩余容量越高,压力越高,电阻值越低,输出值越小,反之亦然。可通过检测电阻值大小判断机器人是否缺水(药),是否已经补充完毕。
5.6NRF无线收发模块
3个NRF24L01分别连接到机器园丁控制端、温棚环境监测端以及服务器端的EasyARM1138开发板上,双向传输信息,在系统的三个部分之间完成信息传输和相互控制。
温棚环境监控端通过无线收发模块分别向服务器和机器人控制端发送监控信息。在机器园丁根据信息执行了对应的工作之后,任务执行情况信息再次由无线收发模块进行反馈。服务器通过无线收发模块控制整个系统。NRF24L01无线模块数据传输过程如图4所示。
6服务器端
服务器端使用无线传感器模块接收到实时信息后,经由虚拟串行端口发送到Cortex A9平台,数据经过处理后,存储在SQLite数据库中,服务器端有触摸式总控程序,生产者也可以通过服务器控制整个系统。当出现异常情况时,系统会自动发送报警信息给生产者的手機,生产者还可以通过智能手机人工控制机器园丁,以完成相应的功能。
7结束语
经测试,植物多功能自动维护系统具有以下特点:
1)具有精细化管理的特点,能对每一棵农作物进行精细化监控、护理操作,基本可以模仿真实工作人员农作物作业。
2)自动水药供应、自动充电,条件不具备时,也可以人工操作。
3)系统中心采用模块结构和网络设计,有助于项目的阶段性实现和功能进一步的完善,且系统功能具有良好的可扩充性。
猜你喜欢
金桥(2019年10期)2019-08-13
经营者(2016年12期)2016-10-21
科学与财富(2016年28期)2016-10-14
考试周刊(2016年79期)2016-10-13
