基于区块链技术的工业机器人视觉检测及避障系统设计
2020-08-03 01:50华丹
计算机测量与控制 2020年7期
华 丹
(1.常州工业职业技术学院 信息工程学院,江苏 常州 213164;2.南京理工大学,南京 210094)
0 引言
工业机器人的研究在国外已经相当成熟,尽管国内对机器人的研究也很重视,但是研究起步较晚,所以国内的智能工业机器人研究效果较差[1]。在工业生产和日常生活中,智能移动机器人的应用多为简单重复的工作,在复杂环境条件下,由于机器人不具备避障能力,所以很容易使机器人进入无限循环[2]。
在机器人视觉检测与避障的研究中,人们提出了许多新颖、实用的控制算法,使该问题得到一定程度的解决[3]。针对移动机器人避障过程中的实时性要求,提出了一种具有较强数据处理能力的控制算法——势场法,作为一种全局规划方法,势场法具有许多优点,采用势场方法,每一障碍物均拥有二维直角网格,机器人移动时,目标位置对移动机器人产生虚拟的引力,障碍对机器人产生排斥,移动机器人是由两种力的结合而成,但势场方法也有其不足之处,主要表现在3个方面:相邻障碍物之间无法找到通路;障碍物面会出现摇摆;狭窄通道会出现摇晃[4]。本地控制方法主要针对未知环境,这是完全基于传感器信息的一种反射策略。在机器人和环境中,无需知道障碍物的绝对坐标,而只需知道其相对位置和相互关系,因此需要大量的传感器探测环境信息。但检测信息量大,所以实时性差,难以实现[5]。
在信息技术领域,区块链是一个术语,其实质是一种共享型数据库,在这种数据库中,所储存的数据或信息具有“不可伪造”、“留痕”和“可追踪”的特征,并具有“公开透明”和"集体维护"的特征。区块链技术就是基于这些特点,奠定了坚实的“信任”基础,形成了可靠的“合作”机制,应用前景广阔。本文设计了一种基于区块链技术的工业机器人视觉检测与避障系统,优化了系统的软硬件结构,保证了工业机器人在视觉检测的基础上完成避障任务[6]。
1 工业机器人视觉检测及避障系统硬件设计
1.1 系统电源设计
基于区块链技术的工业机器人的电源主要由电源控制器、电源外围电路以及电机驱动电路三部分组成。本文所涉及的系统电源选用36 V电压电源作为电源载体,这部分电源载体通过30节1.2 V锂电池串联构成,电源的总容量可以达到3 800 mAh,电源中给的控制器与电源连接设备所需要的电源电压为6 V,电机驱动部分所需要的电压为12 V,为了能够满足不同设备对于电压的不同大小需求程度,本文在电源的电路选择上采取了分配电压较为稳定的线性电路,如图1所示,当电源中所释放的电压需要根据设备的电压需求程度产生电压波动时,本文采用的线性稳定电路能够对多种类型的电压设备进行持续安全的直流电压输出,这种稳定线性电路在进行电压输出的过程中会产生大量的热量,但是由于电路体积较小,方便拆卸与安装并且性能稳定,所以可以将电源电路板安装在通风口出,通过自然通风的方式缓解热量大的缺陷[7]。

图1 系统电源电路
本文电源所采用的线性稳定电路中具备多种不同指标的电压数值,为不同电压数值设备的电压输出提供良好的输出通道,在线性稳定电路中存在着大量的电容,这些电容能够减少电源中的低频纹波,同时还能够解除高频干扰保证了线性稳定电路的稳定运行,在电源的控制器电路板中设计6 V的电压转换电路,电机驱动部分设计12 V的电压电路,并且在12 V的电压电路中预留4个电源外接端口,以备其他需要电源的设备获取电源[8]。
在控制器的主电路板中还需要特殊的电路板供电电源,这种电路板供电电源的额定电压为1.5 V,此电源是本系统中最小的电路供电电源,在此电源中共有64个去耦电容为电源输送通道过滤高频干扰以及电路杂质,电路电源的引脚分别接到1.5 V的模拟供电电路板中,主要为控制器中的数字模型电路板芯片进行供电[9]。本系统在控制器的电路板电源中还安装了VDD数字供电芯片,具有备份供电数据和选择性供电的功能。在电源控制器中有62个增强型的内核单片装置,这些装置的供电电压与控制器的电压相同,当电源电路复位时可以通过增强型内核单片装置对微型控制器进行直接控制,避免因为电源本身产生的原因而导致控制器的非正常状态下工作,内核单片装置电路图如2所示。
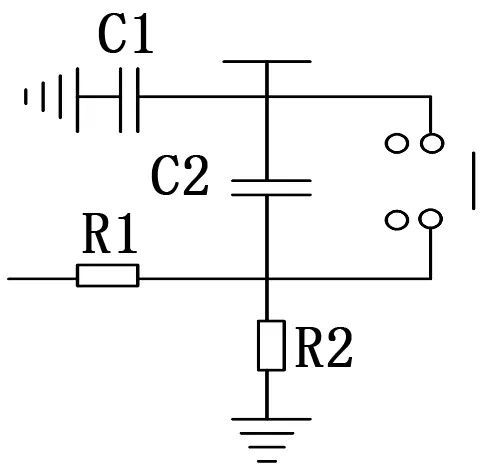
图2 内核单片装置电路图
1.2 传感器设计
工业机器人在运行的过程中需要对障碍物进行数据识别,需要依靠传感器对障碍物所反射出的数据收集,通过传感器所收集的障碍物数据达到工业机器人的视觉检测功能,本文系统所采用的传感器主要应用红外线的反射性能,当传感器结构中的红外线发光二极管向障碍物发出红外线时,传感器内部的光敏接收管可以接收到障碍物所反射的红外线光,根据所反射红外线光的强度可以判断障碍物至机器人的距离[10]。本文所采用的传感器结构如图3所示。
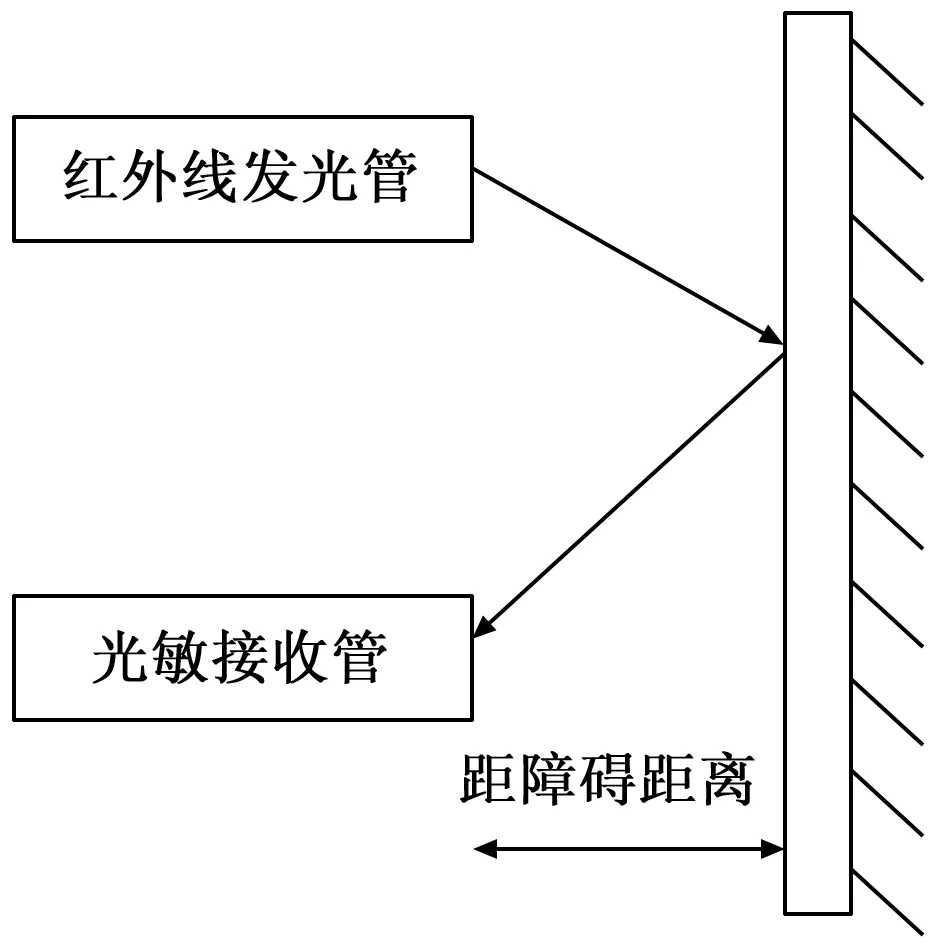
图3 传感器结构图
1.3 通信模块设计
为了使工业机器人能够在无线状态下进行障碍物识别与路径判断,本文选用TX-AS700无线射频通信模块的硬件电路,此通信模块以电源控制器作为主机,可以在待机和供电的状态下进行数据通信和障碍物数据储存,为了增强障碍物数据的储存容量本文选用CE作为通信模块的容量引脚,KLN作为通信模块的信号引脚,SCK作为通信模块的通信输入引脚[11]。通信模块在进行发射和接收通信数据时需要通过SPI信号接口,SPI信号接口是一种更高速,更具备兼容性的接口,可以实现八条通信总线进行连接,还可以通过软件模拟程序控制通信模块的时序状态图来改变通信速率,这种通信模块还可以利用时序状态图对未来的故障路径进行预测,利用这种模块的兼容性来获取障碍物的脉冲信号,如图4所示为通信模块的高兼容性时序图:
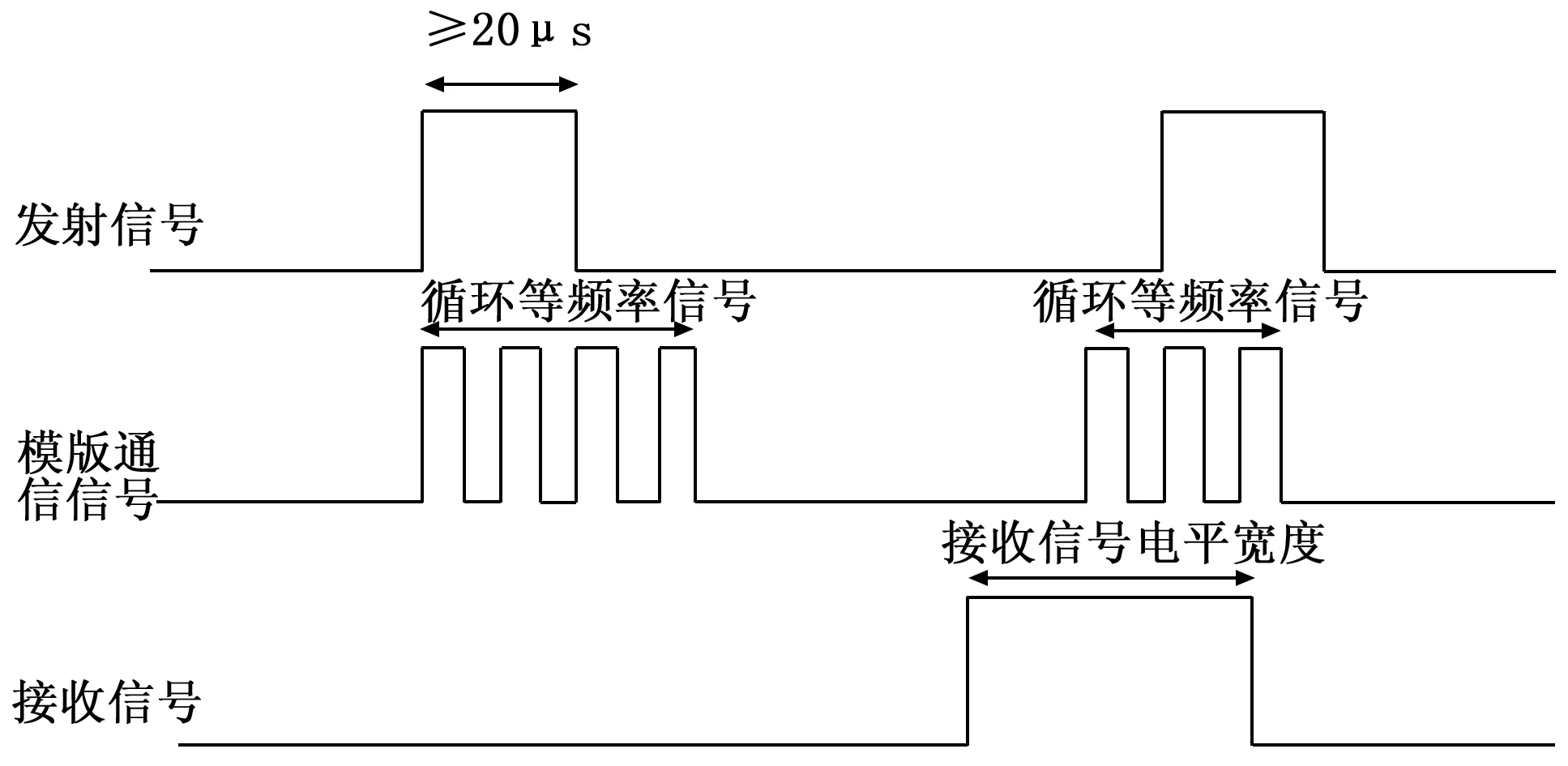
图4 通信模块高兼容性能时序图
1.4 检测器设计
设计检测器对移动机器人的运动状态和周围环境参数进行检测识别,检测器的电路核心为HSJ-2芯片[12]。在检测器中本文采用视觉晶体管作为工业机器人的视觉检测显示器,这种视觉晶体管主要应用薄膜场效应作为检测原理,能够以高速度、高亮度以及高对比度显示机器人前方的障碍物参数信息,这种设计采用1.3英寸彩色显示屏,6 V供电电压,16位数据接口[13]。接口如图5所示。

图5 检测器数据接口图
2 基于区块链技术的工业机器人视觉检测及避障系统软件设计
2.1 区块链技术
区块链技术作为一种互联网数据库技术,是通过中心化和去信任的方式来维护数据库的一种技术方案。区块链技术的原理是将数据库信息发给至整个系统,相当于改变数据库所有的记录,发给全网的其他每个节点。结合机器视觉技术,使区块链具备储存并整合图像信息的能力,因此本文的软件程序也为图形化软件,通过可视化处理设计程序界面,选用Visual C++软件将模拟工业机器人障碍物检测,通过区块阶矩得到障碍物检测公式,判断障碍是否存在,若存在则设计相应的避障策略[14]。
机器人会利用视觉检测提取障碍物的相关信息,将获取的信息图像转变成RGB格式,通过分析图像色彩,将障碍物图像所在区域分成两个区域,分别是安全区A和危险区B,设定机器人所在区域为S,则根据计算区块阶矩得到障碍物检测公式,一阶矩计算公式为:
(1)
其中:t1表示计算得到的图像一阶矩,N表示安全区A和机器人所在区域S对应的像素个数,M1表示像素值。
根据一阶矩得到二阶矩,计算公式为:
(2)
其中:t2为二阶矩。三阶矩,计算公式为:
(3)
根据三阶矩得到比较结果值:
(4)
将得到的I(A,S)与阈值I0相比,判断检测结果是否有效,确定检测效果有效后,程序会启动滤波处理,通过二值化来分析障碍物的轮廓,根据障碍物轮廓得到最佳的避障方案。
2.2 工业机器人视觉检测及避障系统应用程序
在避障环境下通过二维建模确定每个障碍物的大小、数量、个数、位置和形状,通过分析工业机器人移动要求,设定工业机器人初始位置,并确定机器人的移动速度。在Visual C++程序下的避障软件模型如图6所示。

图6 Visual C++程序下避障软件模型
其中,x轴表示工业机器人横向移动方向所在的直线,y轴表示垂直于机器人横向移动方向所在的直线,S表示工业机器人,Z代表不同的障碍物。软件通过程序总框架、计算程序和仿真程序实现避障,程序总框架能够将软件程序连接到一起,及时地向用户反馈消息,实现参数传递,与人机界面交互选择合适的运行环境;计算程序包括逻辑判断和数值转化,能够在短时间处理大量数据,在计算时,系统会自动引入区块链技术数据库,根据数据库资料向程序总框架传递内容,并得出有效的避障方案,这也是软件的核心程序;仿真程序会根据计算结果在短时间内模拟出机器人采取计算程序的移动路线,从而验证策略的有效性[15]。
基于区块链技术的工业机器人视觉检测及避障系统应用程序避障流程如图7所示。
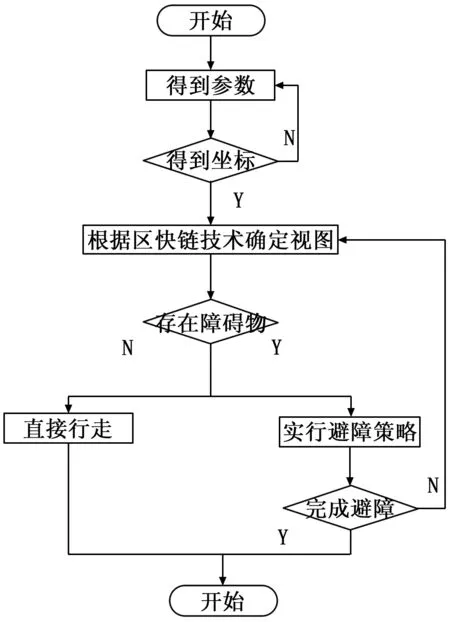
图7 基于区块链技术避障系统应用程序避障流程
应用区块链技术及机器视觉,通过上述流程完成工业机器人视觉检测及避障系统程序运行,运行得到的避障路径将由检测器及通信模块传输至硬件部分,控制机器人选择有效的避障路线。
3 实验与研究
为精准评估本文基于区块链技术的工业机器人视觉检测及避障系统设计的检测及避障性能,设置相应的实验环境进行性能检验,将本文基于区块链技术的工业机器人视觉检测及避障系统设计的设计效果与传统基于PID调速算法的工业机器人视觉检测及避障系统设计及移动探测技术下工业机器人视觉检测及避障系统设计的设计效果进行实验对比。
针对区块链技术操作的复杂性以及工业机器人视觉检测及避障设计的数据点检索的困难性,需对其实验环境进行数据筛选,训练研究的机器人数据,并将训练数据内容及时记录,存储至相同的实验参数集合中,并按照数据操作的基础准则管理操作的研究数据,集中分析机器人的实验环境,并进行如下步骤的实验操作:
1)当机器人进入设置的实验环境中时,结合已有的硬件与软件系统条件下切换远程遥控模式,并通过无线通信传输检测数据,控制机器人开始避障行为。
2)进入无线通信遥控模式后,利用主控制器接收检测终端无线系统发送的无线数据信息,并执行研究指令,控制操作数据属于系统运行范围内。结合运动动作监控及机器人移动速度调节操作,基本控制机器人走向,确保实验研究的安全性。
3)分别设置4个相同的障碍物对机器人避障性能进行检测,固定机器人初始位置起点,选用运动控制器操作机器人向前移动,设置转弯起点位置,控制机器人的方向运动,并及时记录机器人移动的方向信息,将记录的信息传输至主屏界面中进行研究实验观察,同时不断监视此时机器人所处的状态,对比本文系统设计与传统系统设计的实验结果。
在此实验中,根据两个不同的实验参数进行实验对比,进一步提高整体对比效果,并设置相应的实验参数表如表1~2所示。

表1 实验参数1

表2 实验参数2
在实验参数1及实验参数2条件下,采用传统基于PID调速算法的工业机器人避障系统及移动探测技术下工业机器人避障系统为实验对照组,测试3个系统的检测有效率,对比结果如图8所示。
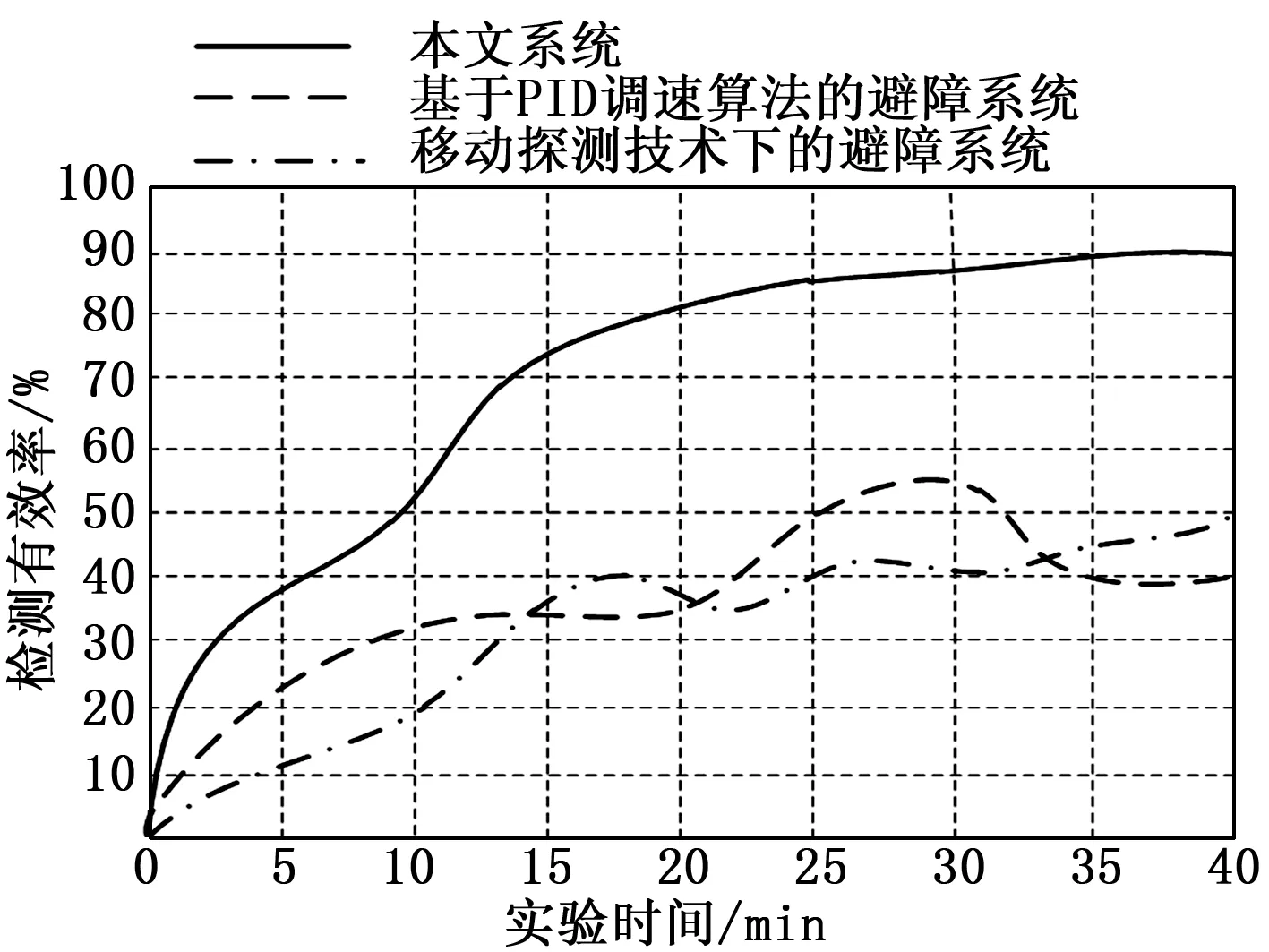
图8 检测有效率对比图
分析图8可知,基于PID调速算法的工业机器人避障系统的检测有效率平均值为43%,移动探测技术下工业机器人避障系统的检测有效率平均值为39%,而本文基于区块链技术的工业机器人视觉检测及避障系统的检测有效率平均值为83%。实验结果表明,本文设计系统对障碍物的检测有效率较高。
在此基础上测试3种系统的避障准确率,与理想避障效果对比,得到避障准确率对比结果如图9所示。

图9 避障准确率对比图
根据以上图示可以分析出,基于PID调速算法的工业机器人避障系统及移动探测技术下工业机器人避障系统的避障准确率较差,而本文基于区块链技术的工业机器人视觉检测及避障系统的避障准确率接近理想避障效果,检测有效率与避障准确率均高于其他两种传统系统。造成此种差异的原因在于本文系统设计按照系统的内部需求执行操作任务,不断强化理论空间的数据可行性,调节系统状态,按照相关硬件与软件职能转变其职能存储模式,并调节数据研究性能,加大对工业机器人数据的初始检测力度,结合数据避障研究,升级其避障功能,理论化处理系统设计操作,由此获取较好的数据操作结果。
4 结束语
本文结合区块链技术设计了一种新的工业机器人视觉避障系统,该系统通过检测器实现视觉检测,利用内部传感器分析移动路径中障碍物之间的距离,通过模糊控制分析输出距离和输出角,在驱动程序的配合下实现避障。相比于目前研究的其它避障系统,本文提出的工业机器人避障系统由于内部数据库资源充足,所以具有很强的数据处理能力,能够在短时间内快速实现避障。传感器分析移动路径中障碍物之间的距离,通过模糊控制分析输出距离和输出角,在驱动程序的配合下实现避障。相比于目前研究的其它避障系统,本文提出的工业机器人避障系统由于内部数据库资源充足,所以具有很强的数据处理能力,能够在短时间内快速实现避障。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
红楼梦学刊(2020年3期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
阅读(快乐英语高年级)(2019年2期)2019-09-10
好孩子画报(2019年10期)2019-01-10
金桥(2018年7期)2018-09-25
当代贵州(2018年21期)2018-08-29
南都周刊(2018年6期)2018-06-23
中小学实验与装备(2016年6期)2017-01-19
环球时报(2009-12-25)2009-12-25