
基于形态滤波的车辆检测算法研究*
2020-08-26 06:55张足生陈伟张先才黄锦旺陈亮
自动化与信息工程 2020年4期
张足生 陈伟,2 张先才 黄锦旺 陈亮
基于形态滤波的车辆检测算法研究*
张足生1陈伟1,2张先才1黄锦旺1陈亮3
(1.东莞理工学院网络空间安全学院,广东 东莞 523808 2.广东工业大学计算机学院,广东 广州 510006 3.深圳市凯达尔科技实业有限公司,广东 深圳 518055)
近年来,越来越多的智能停车管理系统采用无线磁阻传感器网络技术实现车辆检测。但该技术面临磁干扰问题,在干扰环境下,已有的车辆检测算法精度急剧下降。提出一种基于形态滤波的车辆检测算法,采用级联形态开-闭和形态闭-开运算设计滤波器,可有效过滤噪声干扰,且不会造成车辆磁信号的偏倚现象。实验结果表明:与已有车辆检测算法相比,本文算法提高了车辆检测准确率,检测精度达到98.5%。
车辆检测;磁阻传感器;地磁干扰;形态滤波
0 引言
随着我国城市化进程不断加快,机动车保有量急剧增加,城市中心区交通拥堵及停车难问题日趋严重,智能交通已成为解决交通瓶颈的有效途径[1]。无线磁阻传感器网络(wireless magnetic sensor networks, WMSN)是低功耗、低成本智能交通信息采集技术的发展趋势[2]。
WMSN利用车辆对地磁场扰动的检测原理实现交通信息实时采集、传感器节点电池供电和无线通信。相较于传统交通检测技术:地感线圈[3]、微波雷达[4]、超声[5-6]、红外[7]、视频[8-9]等,WMSN具有低成本、低功耗、小型化等特点,生命周期长达5年以上。基于WMSN可以实现静态交通管理:对每个停车位进行监控[10-11],获得车位的空闲状态及停车时长,可用于停车诱导、停车计费、反向寻车及违规停车检测等应用。
然而,WMSN检测对象“弱磁信号”容易受到干扰。轨道交通是造成地磁场干扰的主要因素之一,很多城市地下有密集的轨道交通系统,如地铁、高铁、城际等。在大地电磁学领域,已有一些研究成果可对轨道交通造成的地磁场干扰进行监测。文献[12]、文献[13]根据地磁观测数据分析了地磁噪声来源,发现主要干扰源是直流电气化铁路(地铁),且地铁干扰的主要原因是地铁系统产生的大地漏电电流造成的磁场噪声。文献[14]、文献[15]在高速铁路系统附近区域部署电磁检测站,观测到强烈的磁场干扰。
对于车辆停泊、车流量计数等检测,在低信噪比情况下,目标信号与干扰信号无法分辨,频繁出现误检和漏检,致使检测精度急剧下降。本文基于形态学滤波原理,设计滤波器对干扰信号进行滤波,得到较纯净的车辆磁场信号,再利用阈值机制实现停车检测。
1 相关工作
基于WMSN实现动态交通及静态交通检测主要通过实验采集样本磁信号,利用统计分析得出目标信号特征,进而实现检测机制。Cheung S Y等[16]利用WMSN实现了车辆检测、车速估计等应用。Kwong K等[17]在路段出入口位置安装磁阻传感器,研究节点间磁信号的匹配模型,提出路段交通状态估计方法。针对车速检测中,前后放置的磁阻传感器对同一车辆的感知信号存在扭曲、变形问题,文献[18]提出一种基于动态时间规整的波形相似度计算方法,提高了车速检测精度。但这类机制只适用于干净的磁场环境,没有考虑磁干扰问题。
有部分学者研究抗干扰检测机制。崔莉等[19]提出信号相关检测算法,通过比较理论模型信号与采样磁场信号的相似性来实现车辆检测,该方法可对非机动车(自行车、摩托车等)干扰进行排除。文献[20]利用节点磁场波形与相邻节点波形进行比较实现停车检测,也具有一定抗干扰性。文献[21]将停车过程划分为驶入、停泊和驶离3个阶段,分析各阶段的信号变化特征,提取特征变量,利用线性判别函数实现车位状态的{0,1}二值分类检测,该方法可以降低邻近干扰带来的误检。
对于抗干扰检测问题,一些学者尝试在磁阻传感器的基础上加装其他类型传感器进行辅助检测,如光敏、红外、超声、多普勒雷达等辅助传感器。文献[22]设计一种磁阻传感器和光敏传感器合作工作方式:首先,利用光敏传感器检测汽车投下的阴影;然后,唤醒磁阻传感器进行车辆检测。文献[23]针对垂直式停车位车辆检测准确率低的问题,用光敏传感器进行辅助判别。这类方案往往在较为理想的干净环境下有效,而室外道路环境下,传感器节点布设在地面以下,模具封装需要考虑到抗压、防水、防盗等因素,且加装额外的传感器导致节点成本、功耗升高。综合以上因素,目前在室外道路环境下,通过加装其他类型传感器解决磁干扰问题不是合适的方案。
目前,有关检测机制的研究主要集中在干净磁场环境下的车辆检测,有少量关于邻近干扰的检测机制,但没有相关研究考虑轨道交通系统地磁场干扰问题,在这类强干扰环境下,已有算法的检测精度急剧下降,算法适用性差。
2 问题描述
2.1 网络模型
WMSN模型可抽象为{,,},其中= {1,2,…,D}为传感器节点集合;{1,2,…, R}为路由节点集合;为基站节点。在每个停车位的中央安装1个传感器节点,如图1所示。
传感器节点D利用磁阻传感器,以为采样频率周期性对地磁进行采样,采样磁场信号()为

(1)式中,为最近采样;C()为地球磁场;I()为干扰磁场;V()为车辆磁场;为标识磁传感器的采样轴。
图1 传感器节点部署
通常磁传感器具有,,三轴采样信号。传感器节点D运行车辆检测算法。如果车位状态发生改变,传感器节点D发送一个事件消息{D,(),()}到基站。
2.2 地磁干扰
经检测,路边停车位附近的地磁干扰信号来源于路面下的地铁。如图2所示,地铁系统的基本结构由整流变电站、架空电力线、列车、轨道和地面组成,其中地面和铁轨形成电流回路。地铁系统产生磁场的主要类型有:
1)火车本身产生局部磁场;
2)由变电站-架空电力线-列车-轨道组成的环路中牵引电流产生磁场;
3)由于轨道和地面并非完全绝缘,轨道靠近地面,电流从轨道泄漏到地面产生的磁场。
在列车上或列车附近观察时,第1)和第2)类型的磁场比较明显。但第3)类型的磁场可对地球磁场产生数十公里的直接影响[24-25]。
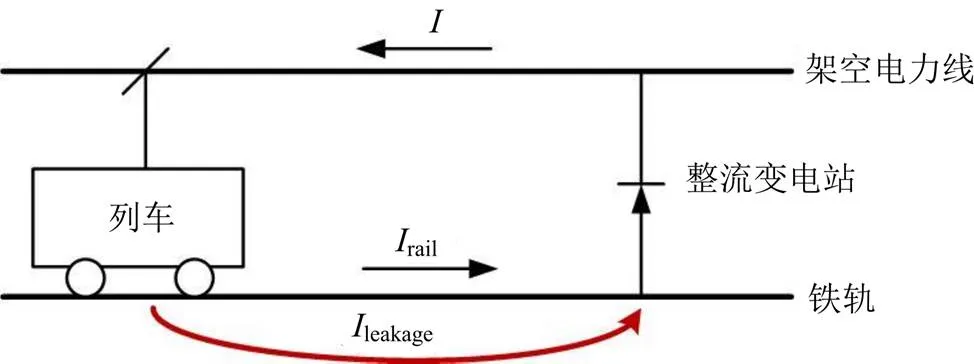
图2 地铁系统基本结构
在深圳市某地铁站附近的路边停车位上,安装传感器节点进行信号采集,如图3所示,地磁场被严重干扰。
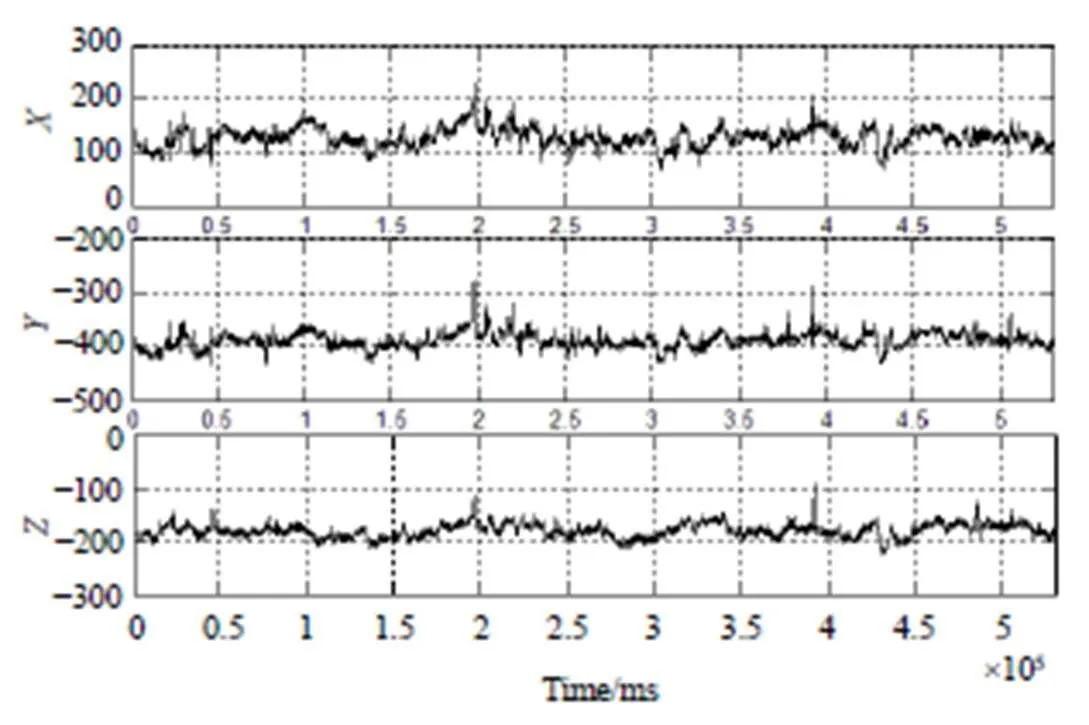
图3 地铁系统产生的磁干扰信号
2.3 问题定义
综上所述,车辆检测算法的任务包括:1)分辨出信号是否被干扰;2)对干扰的信号进行除噪处理;3)能准确检测到车辆存在。该算法可定义为

输入:

式中,C()为地球磁场,通常在几公里的范围内恒定不变,为常量;V()为停车时车辆产生的磁场信号;I()为轨道交通系统产生的地磁干扰信号。
输出:
1)()=1:在车位空闲期间检测到车辆存在,车位进入占用状态。
2)()=0:在车位占用期间检测到车辆驶出,车位则转为空闲状态。
3 车辆检测算法
由于传感器节点由电池供电,且微处理器的计算能力及存储能力极度受限,复杂运算的信号处理方法并不适合,因此本文采用计算简便的形态滤波器进行去噪。车辆检测算法的工作流程如图4所示,对采样得到的,,三轴原始信号进行信号合成;判断是否含有干扰信号;若存在干扰信号,则需进行形态滤波器及阈值检测;否则直接进行阈值检测。
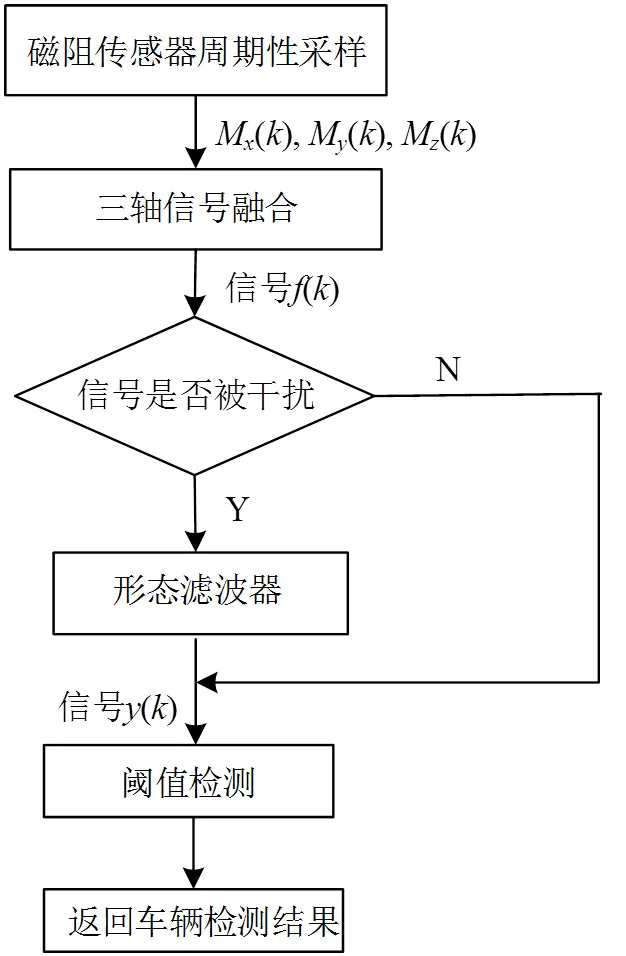
图4 车辆检测算法工作流程图
3.1 信号融合
车辆停泊在车位时,磁阻传感器会采集到磁场波动数据信号,采用三轴磁阻传感器进行周期性数据采集,周期设定为0.1 s。多次车辆停泊的采样数据如图5所示。
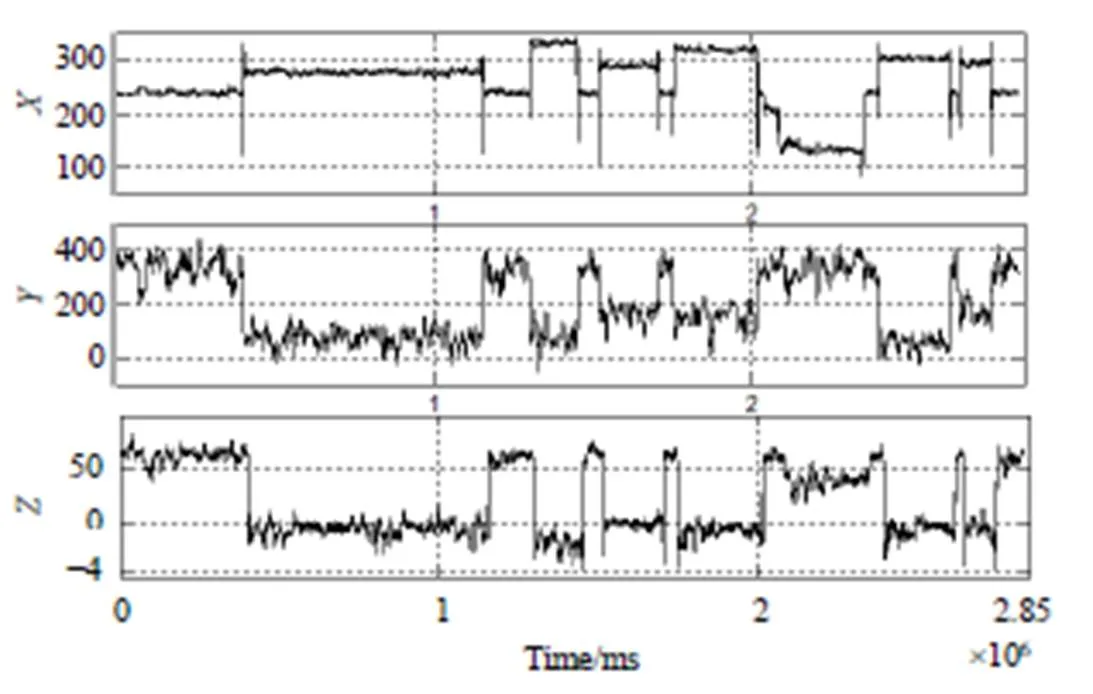
图5 车辆停泊时的三轴原始信号
为减少计算复杂度,并综合反映三轴的变换幅度,将三轴信号融合成一个信号。

式中,B为轴的基线值,在传感器部署后进行初始化,分别取传感器开启后的前50次采样数据的轴平均值作为B值。
图5融合后的数据如图6所示,数据存在大量噪声,不利于车辆检测,需将融合后的数据除噪处理。

图6 三轴融合后的信号
3.2 干扰判别
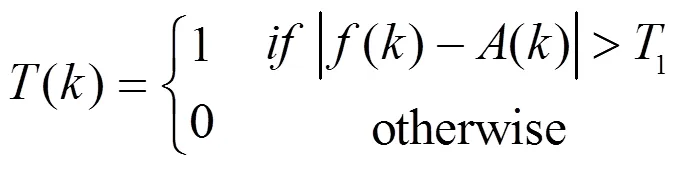
利用式(4)求窗口为的移动平均值()。
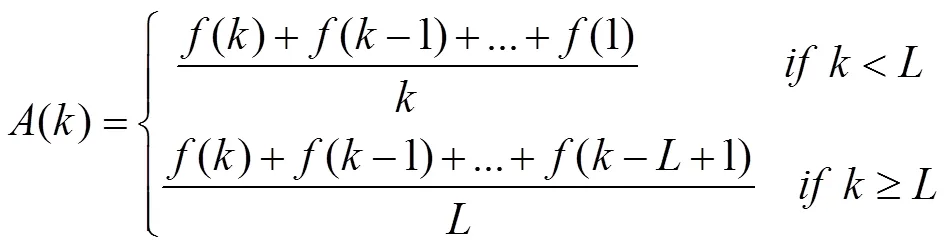
式中,()为三轴融合后的信号;为缓存区的长度;用[]缓存[(),(−1), …,(−+1) ]。
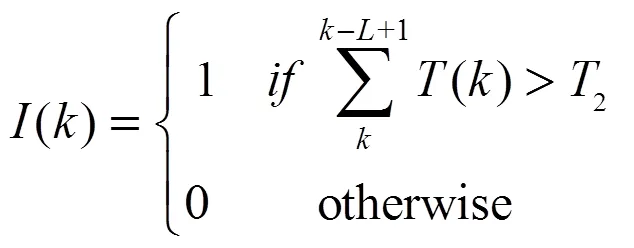
利用式(5)判断当前值()与移动平均值()的偏离程度,其中1是阈值。用2[]缓存[(),(−1), …,(−+1) ]。统计2[]中() = 1的次数,若次数>2,则表示信号被干扰;如式(6)所示,如果() = 1则表示地铁系统干扰。
3.3 滤波器设计

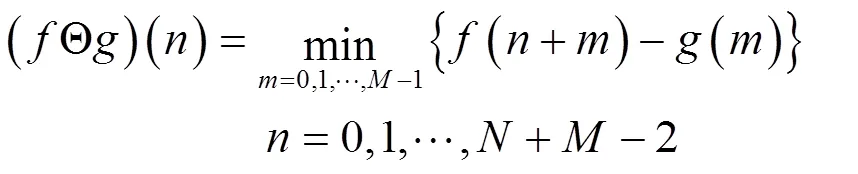
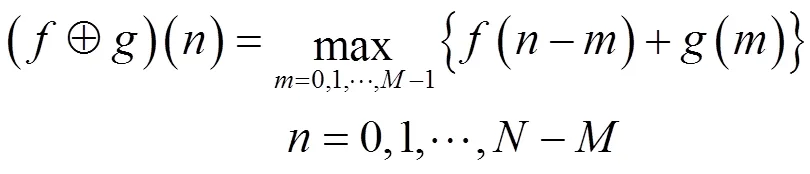
输入信号()关于结构元素()的形态闭与形态开运算分别为


被干扰的信号从形态上通常表现为信号上叠加了一些窄脉冲信号,即很低的波谷与很尖的波峰。形态闭运算可以填平谷,形态开运算可以削去峰。
采用同一类型和尺寸的结构元素,通过不同顺序级联形态开、闭运算[27],定义形态开-闭()和闭-开滤波器()为


由形态开、闭运算的功能可知,如式(11)、式(12)所示的形态开-闭和形态闭-开滤波器都能去除输入信号中的正、负脉冲干扰信号。但是,一方面,形态开运算具有收缩性,导致开-闭滤波器输出的信号变小;另一方面,形态闭运算具有扩展性,导致闭-开滤波器的输出信号变大。因此,采用单一的形态开-闭或形态闭-开滤波器都可能造成输出信号存在偏倚现象,从而影响滤波器性能。本文构造的滤波器如式(13)所示,采用级联形态开-闭和形态闭-开运算,该滤波器用于地磁强干扰噪声的分离,可有效过滤地铁系统的噪声干扰,且不会造成输出信号的偏倚现象。

3.4 检测算法伪代码
基于形态学滤波的车辆检测算法(morphology filter based algorithm, MFBA)的伪代码如图7所示。如果信号存在干扰,则进行形态滤波,()为滤波后的信号。使用阈值对()进行检测:如果()持续超过阈值次,则判定有车;如果()持续低于阈值次,则判定无车。
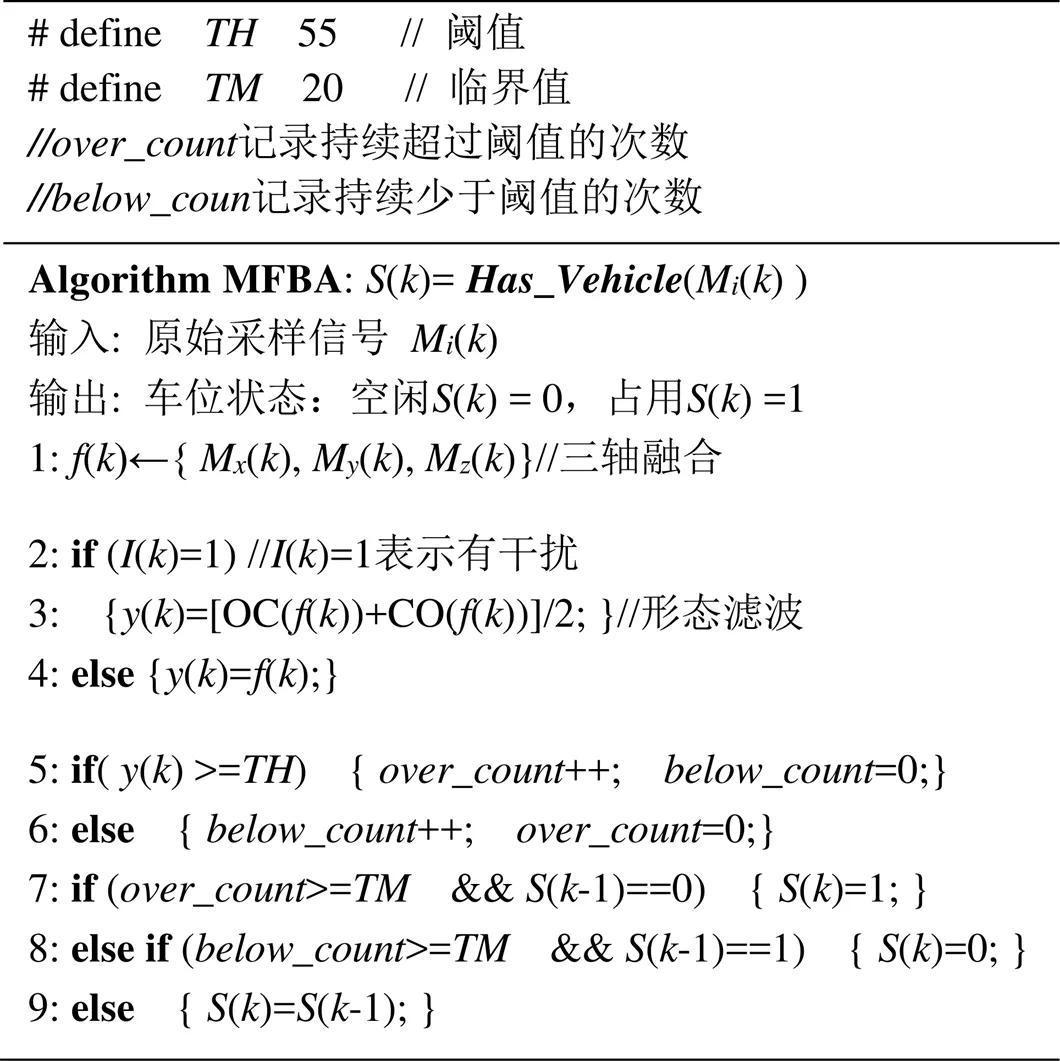
图7 算法伪代码
4 实验
磁阻传感器节点采用STM8L151C8 MCU,集成HMC5883L磁传感器,无线通信采用Lora SX1278模块,15 AH锂电池供电。实验参数取值如表1所示。
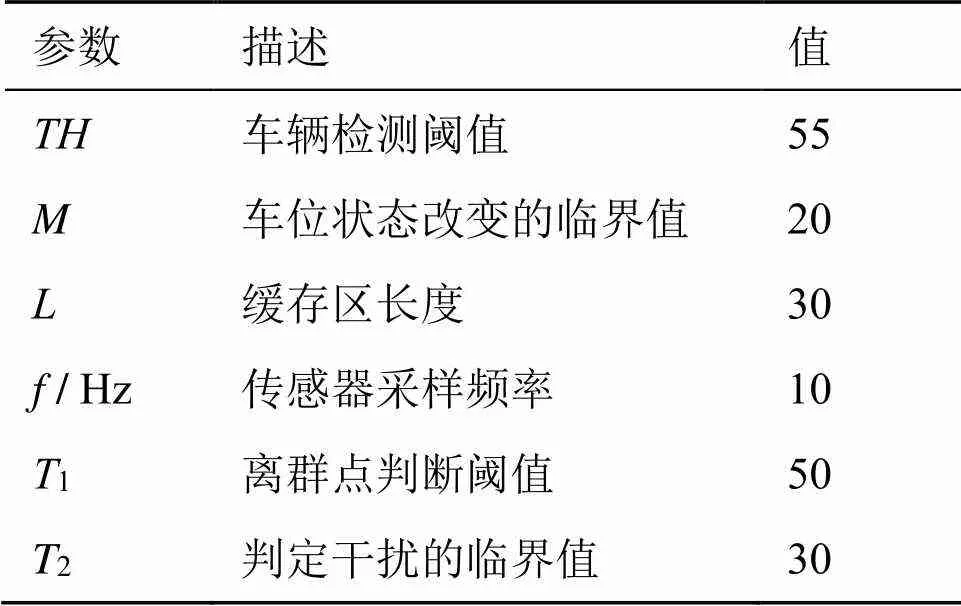
表1 实验参数
4.1 形态结构选取
形态学滤波器性能与所设计的形态运算组合和结构元素2个因素有关。结构元素的宽度和形态对滤波效果有很大影响。已有研究结果表明[26-27]:有必要选择与目标信号特性相似的结构元素。在形态滤波中,常用结构元素有三角型、直线型、正弦型、抛物线型等。
三角型结构元素如图8所示,用如图6所示信号作为输入,滤波后的信号如图9所示。抛物线型结构元素如图10所示,对图6所示的信号进行滤波,滤波后的结果如图11所示。由于待提取车辆的磁场信号与抛物线型结构更相似,从图11可见抛物线型结构元素的滤波效果比三角型结构元素更好。在后续的实验中都采用如图10所示的抛物线型结构元素。
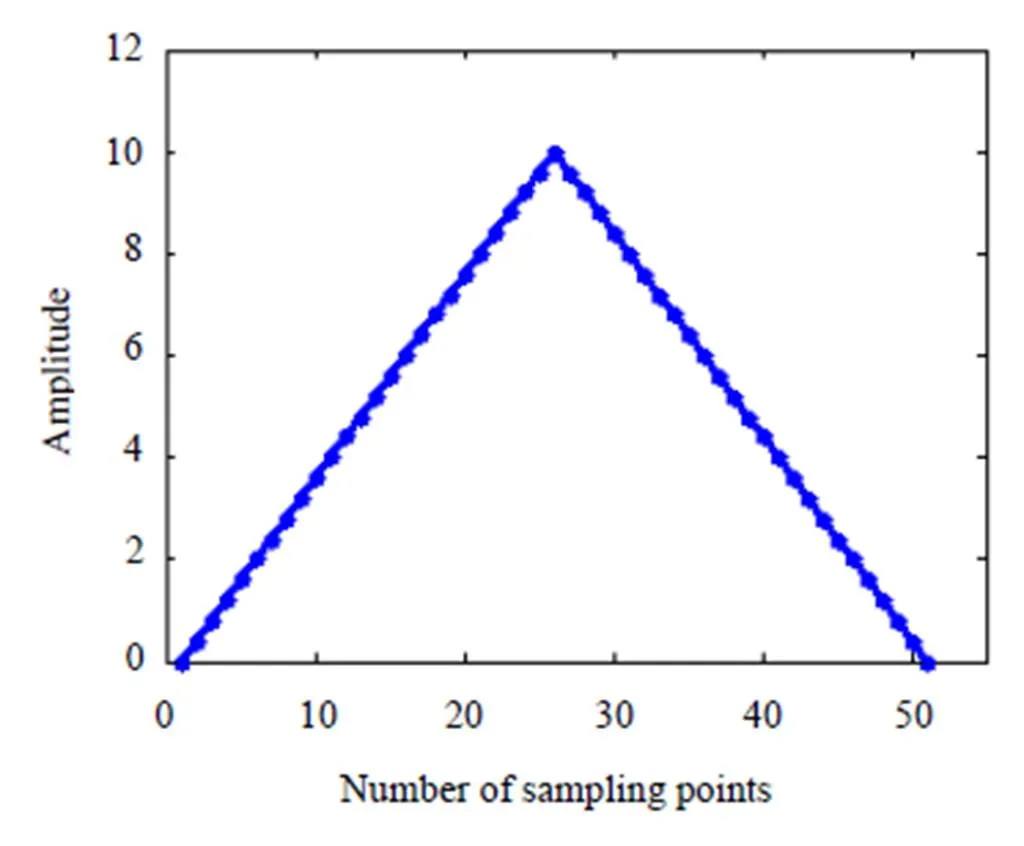
图8 三角型结构元素

图9 三角型滤波结果
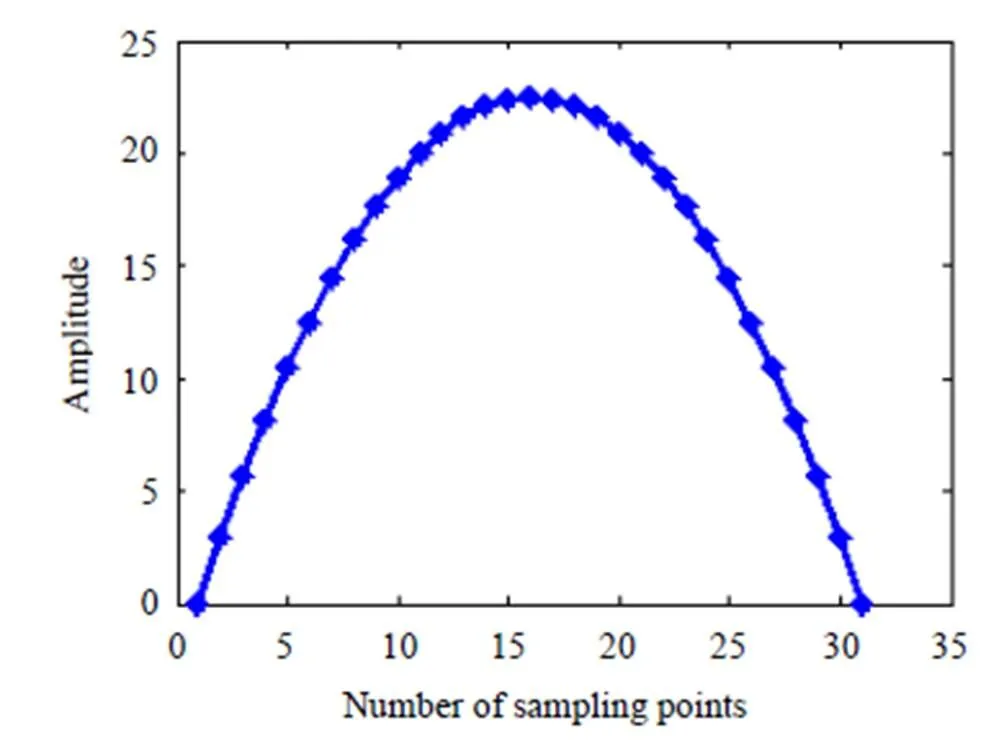
图10 抛物线型结构元素
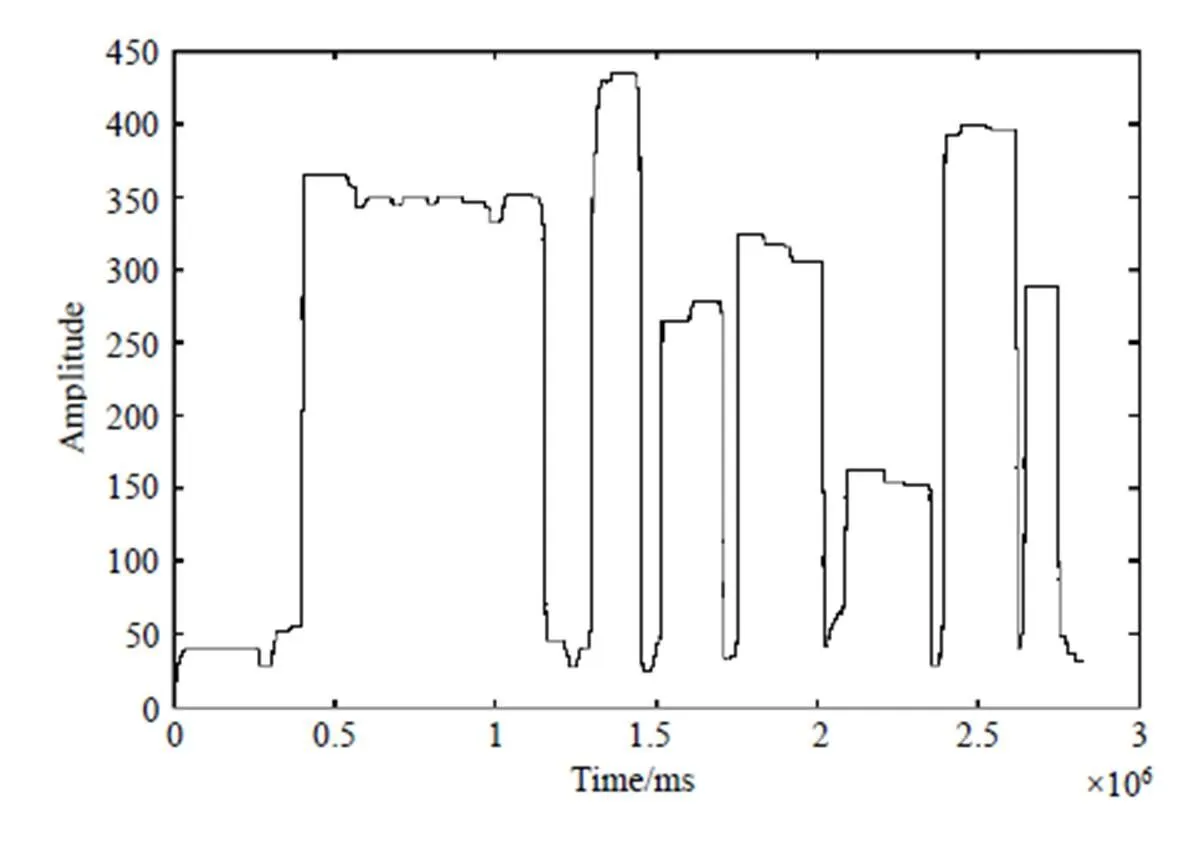
图11 抛物线型滤波结果
4.2 实验结果
为测试本文算法的检测精度,在深圳市某地铁站附近的路边停车场实地部署了30个传感器节点实验系统,测试场景如图12所示。该实验系统持续运行超过5个月,统计的车辆检测算法的平均精度为98.5%,如表2所示。

图12 测试场景
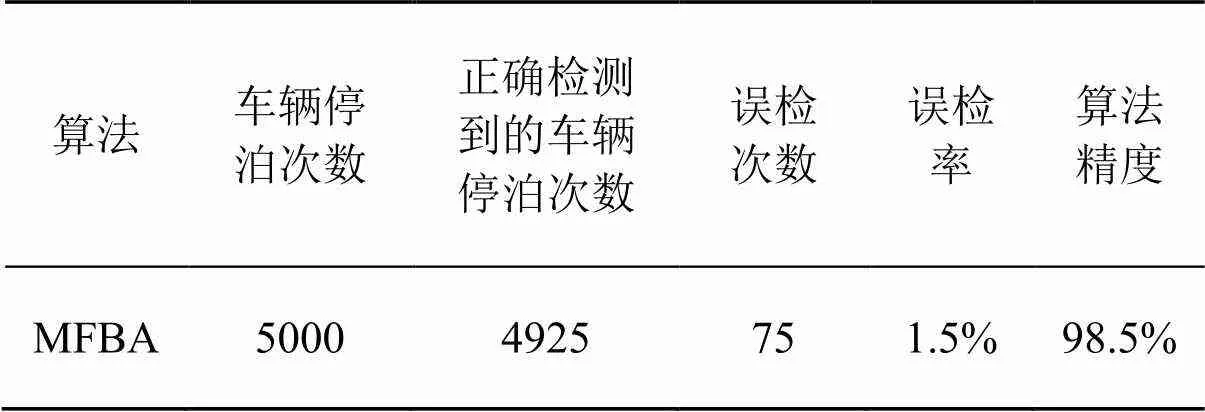
表2 车辆检测统计结果
为方便多种算法的性能比较,磁阻传感器将原始采样数据每30个打包成一个数据包并上传。该封装方法可减少传输冲突和能耗。上位机软件接收基站上传的磁场数据,实现数据解析,并将数据存储在数据库中。使用C语言实现多种算法。采用从实验中获得的原始磁场信号,算法在服务器端运行。将本文算法MFBA与Max_Min[10]和ATA(adaptive threshold algorithm)[16]算法进行性能比较,对比实验结果如表3所示。
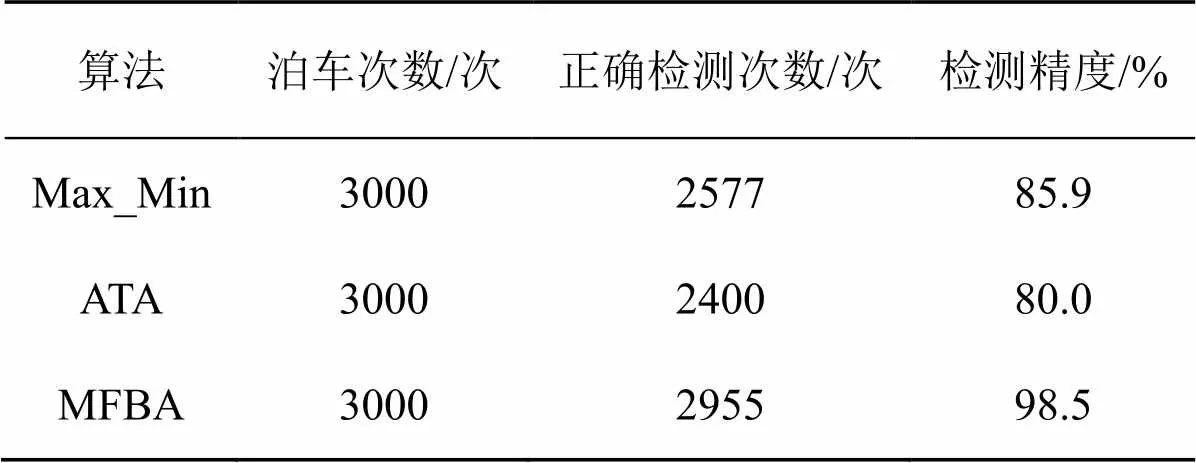
表3 算法性能比较
Max_Min算法基于统计车辆波形的最大值、最少值作为特征变量,设置特定阈值对特征变量进行检测,检测精度为85.9%。ATA算法基于阈值和状态机机制对车辆进行检测,检测精度为80.0%。这2种算法对强磁车辆都能成功检测,但由于没有滤波功能,导致抗干扰性差,在低信噪比情况下,无法准确实现弱磁信号车辆的检测。本文算法MFBA对受干扰的信号进行滤波,检测精度为98.5%,优于Max_Min和ATA算法。
采样的磁信号如图13所示。3种算法的检测结果如图14所示。ATA和Max_Min算法在37 min时都出现了误检。此外,ATA算法在48 min时对一次停车事件产生了漏检,但MFBA算法正确地检测到所有停车事件。
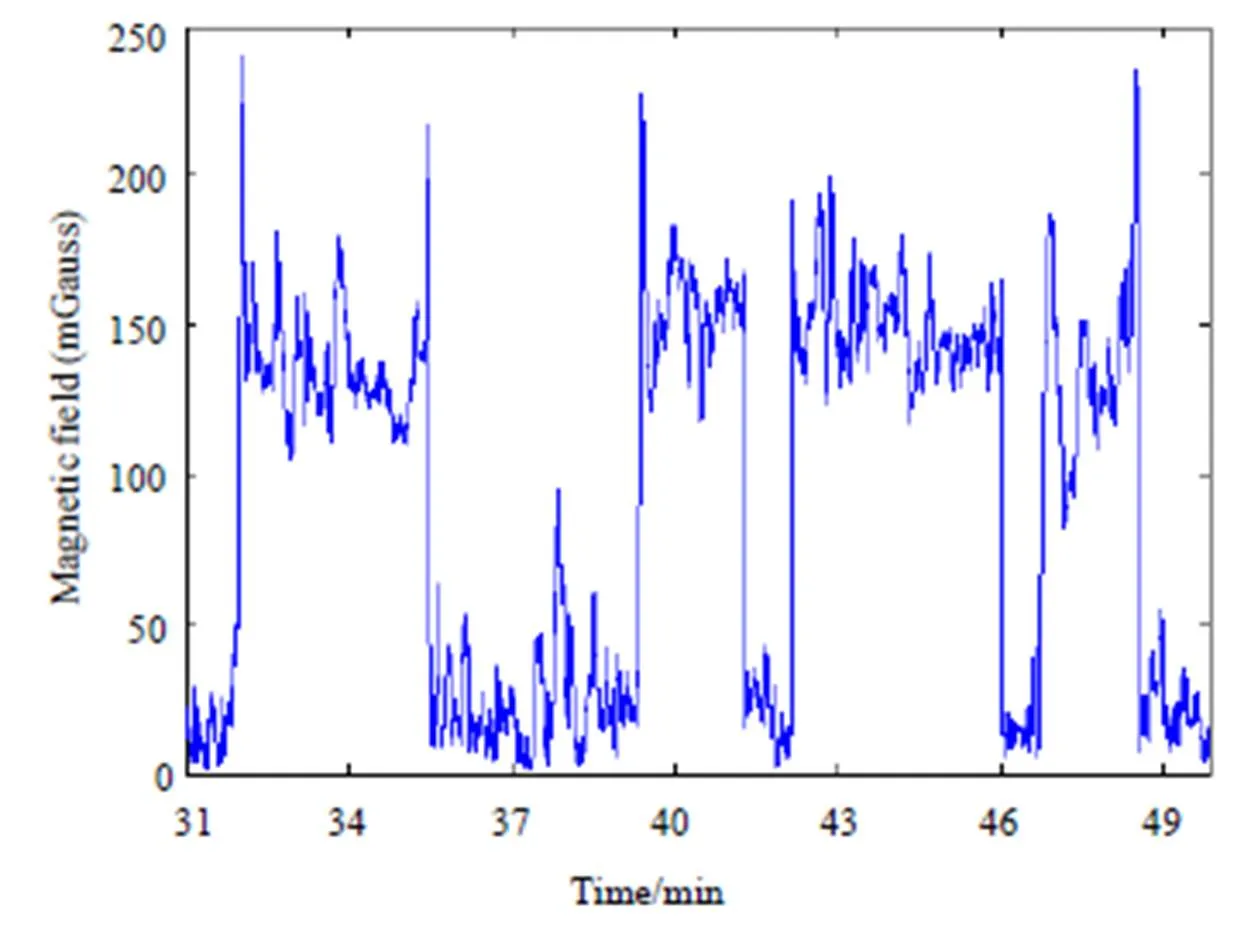
图13 待检测信号
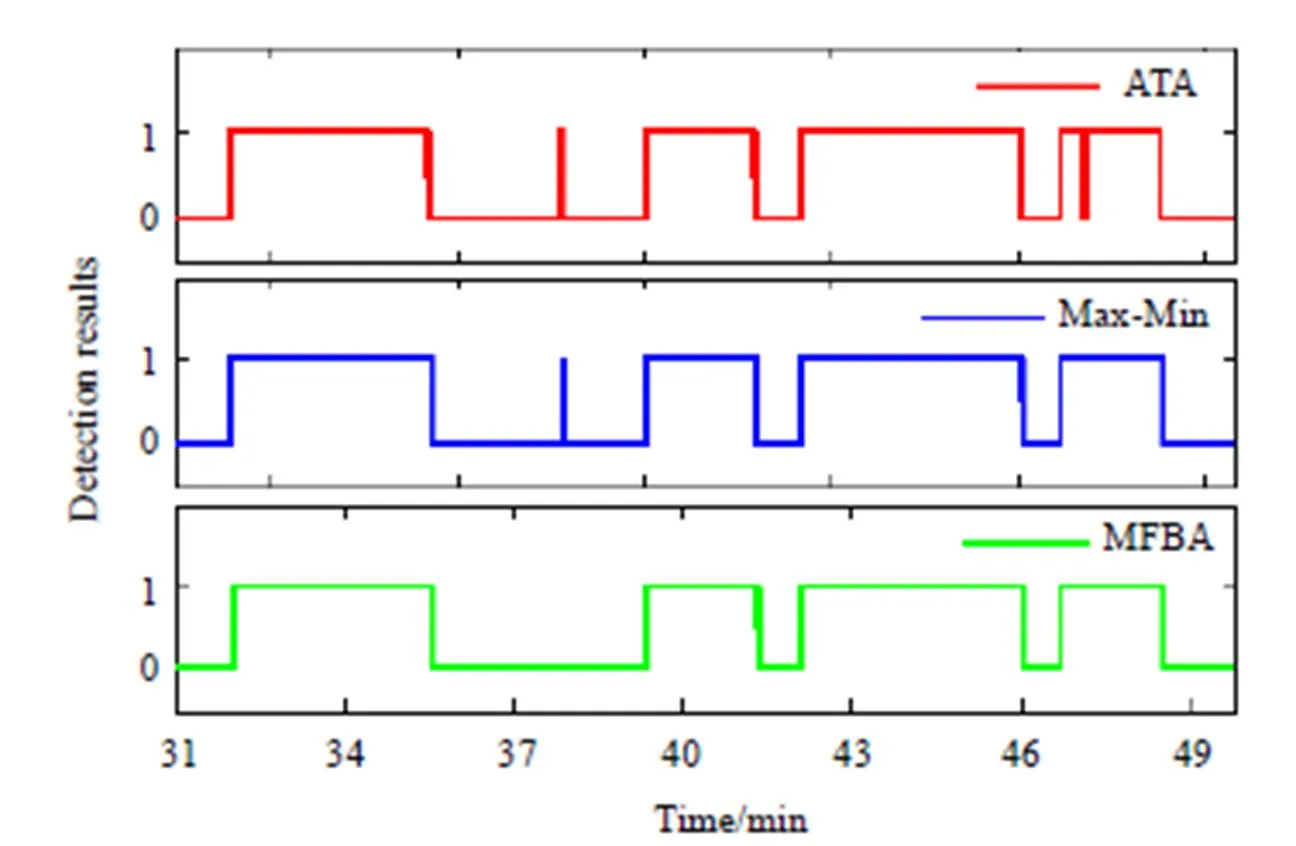
图14 3种算法的检测结果
5 结论
本文提出了抗干扰的停车检测算法,设计形态滤波器,采用抛物线型结构元素,将受干扰的信号进行滤波,结合阈值检测机制实现停车检测算法。实验结果表明该算法的检测精度达到98.5%。
[1]郭戈,许阳光,徐涛,等.网联共享车路协同智能交通系统综述[J].控制与决策,2019,34(11):2375-2389.
[2] 孙荣丽,王睿,崔莉.交通无线传感器网络研究进展[J]. 计算机研究与发展, 2012, 48(S2): 360-366.
[3] Ali S, George B, Vanajakshi L, et al. A multiple inductive loop vehicle detection system for heterogeneous and lane-less traffic [J]. IEEE Transactions on Instrumentation and Measurement, 2011, 61(5): 1353-1360.
[4] Lopez A A, Quevedo A, Yuste F, et al. Coherent signal processing for traffic flow measuring radar sensor [J]. IEEE Sensors Journal, 2018, 18(2): 4803-4813.
[5] Park W, Kim B, Seo D, et al. Parking space detection using ultrasonic sensor in parking assistance system [C]//IEEE Intelligent Vehicles Symposium. IEEE, 2008.
[6] Wu T, Tsai P, Hu N, et al. Research and implementation of auto parking system based on ultrasonic sensors[C]// 2016 International Conference on Advanced Materials for Science and Engineering (ICAMSE). IEEE, 2016.
[7] Li L, Zhang Y, Lv S, et al. Design of intelligent infrared vehicle detect system based on ZigBee[C]// 2015 Chinese Automation Congress (CAC) . IEEE, 2015.
[8] Huang C, Vu H. Vacant parking space detection based on a multilayer inference framework[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2017, 27(9): 2041-2054.
[9] Tschentscher M, Prub B, Horn D. A simulated car-park environment for the evaluation of video-based on-site parking guidance systems [C]//IEEE Intelligent Vehicles Symposium. IEEE, 2017.
[10] Gu J, Zhang Z, Yu F, et al. Design and implementation of a street parking system using wireless sensor networks[C]// IEEE International Conference on Industrial Informatics. IEEE, 2012.
[11] 陈嘉明,张足生,吴晓鸰.基于磁阻传感器的智能车位锁停车检测算法[J].集成技术,2019,8(6):21-30.
[12] Santarelli L, Palangio P, Lauretis M. Electromagnetic background noise at L' Aquila Geomagnetic Observatory [J]. Annales of Geophysicaes, 2014, 57(2): 1153-1161.
[13] Chen C H, Lin C H, Yen H Y, et al. Artificial magnetic disturbance from the mass rapid transit system in Taiwan [J]. Terra Nova, 2017, 29(5): 306-311.
[14] Bellan D, Pignari S A. Monitoring of electromagnetic environment along high-speed railway lines based on compressive sensing [J]. Progress in Electromagnetics Research C, 2015, 58(6): 183-191.
[15] Bellan D, Spadacini G, Fedeli E, et al. Space-frequency analysis and experimental measurement of magnetic field emissions radiated by high-speed railway systems [J]. IEEE Transactions on Electromagnetic Compatibility, 2013, 55(6): 1031-1042.
[16] Cheung S Y, Varaiya P. Traffic surveillance by wireless sensor networks: Final report [R]. Technical report, California PATH, University of California, Berkeley, CA 94720, 2007.
[17] Kwong K, Kavaler R, Rajagopal R, et al. Real-time measurement of link vehicle count and travel time in a road network [J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(4): 814-825.
[18] Zhang Z, Zhao T, Ao X, et al. A vehicle speed estimation algorithm based on dynamic time warping approach [J]. IEEE Sensor Journal, 2017, 17 (8): 2456-2463.
[19] Zhang L, Wang R, Cui L. Real-time traffic monitoring with magnetic sensor networks [J]. Journal of Information Science and Engineering, 2011, 27(4): 1473-1486.
[20] Zhu H, Feng S, Yu F. Parking detection method based on finite-state machine and collaborative decision-making [J]. IEEE Sensors Journal, 2018, 18(23): 9829-9839.
[21] Zhang Z, Tao M, Yuan H. A parking occupancy detection algorithm based on AMR sensor [J]. IEEE Sensors Journal, 2015, 15(2): 1261-1269.
[22] Sifuentes E, Casas O, Pallas-Areny R. Wireless magnetic sensor node for vehicle detection with optical wake-up [J]. IEEE Sensors Journal, 2011, 11(8): 1669 - 1676.
[23] Huang Y, Chen Y, You C, et al. Toward an easy deployable outdoor parking system — lessons from long-term deployment[C]// 2017 IEEE International Conference on Pervasive Computing and Communications. IEEE, 2017.
[24] 谢凡,滕云田,胡星星,等.地磁台站的城市轨道交通干扰的小波抑制方法研究——以天津轨道交通干扰为例[J].地球物理学报,2011,54(10):2698-2707.
[25] 吴利辉,滕云田,王喜珍,等.南京地磁台地铁干扰特征分析与抑制处理[J].地震地磁观测与研究,2009,30(6):32-39.
[26] 刘艳丽,赵为松,李海坤,等.基于形态滤波的脉搏波信号基线漂移消除方法研究[J].合肥工业大学学报(自然科学版),2011,34(4):525-528.
[27] 李晋,汤井田,肖晓,等.基于组合广义形态滤波的大地电磁资料处理[J].中南大学学报(自然科学版),2014,45(1): 173-185.
Research on Vehicle Detection Algorithm Based on Morphological Filtering
Zhang Zusheng1Chen Wei1,2Zhang Xiancai1Huang Jinwang1Chen Liang3
(1.Dongguan University of Technology, School of Cyberspace Security, Guangzhou 510006, China 2.Guangdong University of Technology, School of Computer Science, Guangzhou 510006, China 3.Shenzhen Cadre Technology Industry Co. Ltd, Shenzhen 518055, China)
In recent years, more and more intelligent parking management systems use wireless magnetic sensor network technology to realize vehicle detection. However, this technology is facing the problem of magnetic interference. Under the interference environment, the vehicle detection accuracy of the existing algorithm drops sharply. This paper proposes a vehicle detection algorithm based on morphological filtering, which uses cascading morphological open-close and close-off operations to design filters. This filter can effectively filter noise without causing bias of the vehicle magnetic signal. The experimental results show that, compared with the existing vehicle detection algorithms, the algorithm in this paper improves the vehicle detection accuracy rate, and the detection accuracy reaches 98.5%.
vehicle detection; magnetic sensor; magnetic interference; morphological filtering
张足生(通信作者),男,1980年生,博士,副研究员,主要研究方向:物联网。E-mail: zszhang@dgut.edu.cn
陈伟,男,1995年生,硕士研究生,主要研究方向:智能交通。
张先才,男,1995年生,硕士研究生,主要研究方向:物联网。
黄锦旺,男,1984年生,博士,讲师,主要研究方向:数字信号处理。
陈亮,男,1984年生,硕士研究生,工程师,主要研究方向:物联网。
国家自然科学基金面上项目(61872083);广东省自然科学基金项目(2019A1515011123);东莞理工学院科技产业创新服务专项(2019ZYFWXFD02)。
TP393
A
1674-2605(2020)04-0004-08
10.3969/j.issn.1674-2605.2020.04.004
猜你喜欢
大电机技术(2022年5期)2022-11-17
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
防爆电机(2021年4期)2021-07-28
时代人物(2019年29期)2019-11-25
电子制作(2018年19期)2018-11-14
电子制作(2018年16期)2018-09-26
中学生数理化·高二版(2016年12期)2017-02-28
火控雷达技术(2016年3期)2016-02-06
Coco薇(2016年1期)2016-01-11
