运用动量分析老年人身体站立前倾时的动态平衡特征
2020-08-27 12:16张帆林榕蒋琴华王竹影吴志建宋彦李青
中国老年学杂志 2020年16期
张帆 林榕 蒋琴华 王竹影 吴志建 宋彦李青
(1南京森林警察学院特警学院,江苏 南京 210023;2南京师范大学体育学博士后流动站;3空军特色医学中心第五研究室;4南京信息职业技术学院体育部)
跌倒作为影响老年人健康及独立生活的重要危险因子,如何预防一直以来都是重要课题〔1〕,个体身体姿势、肌力、关节活动度与平衡动作控制策略存在不同程度的差异〔2〕。以往相关研究〔3,4〕多利用身体质心(COM)晃动程度或是压力中心(COP)轨迹的变化关系来评估平衡的稳定性,这会造成评量结果不一致或不具代表性。而针对COM与支撑面(BOS)的相关研究显示〔5〕,利用COM速度或稳定极限(LOS)等相关参数以量化平衡,则能进一步探究影响平衡的内在机制。近年来有学者利用动量参数〔6〕研究执行不同动作时的平衡机制。按照动量定理,人类的动作均与动量有关,动量是一个活动物体维持动作的倾向,除非相反的力作用到物体上而改变它,因此作为引发日常生活功能性活动,亦是维持平衡稳定性的动量,可为个体提供动态能力来控制整个身体位置与动能〔7〕,使得COM在各种活动中能位移到BOS以外的位置,而跌倒恰恰较易发生在执行COM有较大位移的动作任务时,如频繁涉及身体前倾的跨越、上下楼梯等。但目前利用动量探讨年龄差异对动态平衡机制影响的研究仍处于空缺状态,有必要详加探讨,帮助分析平衡系统在个体正常老化进程中的变化。鉴于此,拟运用动量定理,以存在跌倒风险且需姿势控制能力的身体前倾动作为评估对象,探讨老年人与年轻人在动态平衡能力方面的差异,以期为探究个体平衡维持机制、预防跌倒和发展应对措施提供科学参考。
1 对象与方法
1.1研究对象 研究对象分为老年组和年轻组,合计32人。16位老年人为老年组,平均年龄(68.9±3.7)岁,平均身高(165.2±3.6)cm,平均体重(61.2±4.9)kg,平均足长(23.9±1.8)cm;16位大学生为年轻组,平均年龄(20.3±2.5)岁,平均身高(167.3±4.8)cm,平均体重(60.2±4.7)kg,平均足长(24.0±3.4)cm。组内男女各8人。
1.2研究方法
1.2.1实验筛查与控制 ①受试者无运动中枢控制障碍或神经系统病变,且过去半年内无下肢肌肉或骨骼的相关疾病与损伤;②受试者实验前1 d未进行下肢剧烈运动,且前6个月未从事任何平衡方面的相关训练;③老年受试者可独立行动,不须任何辅具或拐杖协助行走;④使用Romberg测试筛检老年受试者的平衡能力,以确保其基本平衡能力无明显缺失;⑤实验当天,受试者均无任何进行中的疾病,如感冒、发热等;⑥受试者平均身高、体重和足长,组间分别控制在±3以内,组内分别控制在±5以内,以避免额外因素造成实验误差。
1.2.2实验仪器与设备 ①英国产VICON(Oxford Metrics.UK)三维动作捕捉系统,包含5个高分辨率红外线摄影机,可获取人体动作时各关节光点的前后(X方向)、左右(Y方向)和上下(Z方向)方向的坐标原始资料。②美国产AMTI(AMTI Inc.USA)三维测力板一块,可测量X方向、Y方向和Z方向方向的地面反作用力大小及相对应的力矩,其中,地面反作用力的测量单位为N,敏感度为1 N;力矩测量单位为N-m,敏感度为5 N-m。
1.2.3实验方法与步骤 ①资料收集:运动学参数的收集利用VICON三维动作捕捉系统(频率设定 120 Hz)拍摄,并获取受试者身体前倾时各关节点 3D 原始坐标资料。反光球贴于受试者右侧肩关节上的肩峰、肘关节上的肱骨外上髁、腕关节上的尺骨茎突、髋关节上的大转子及踝关节上的外踝。动力学数据以AMTI 测力板收集受试者执行前倾动作时地面前后、左右及垂直方向的反作用力与COP值,取样频率为 600 Hz。②动作要求:受试者实验前静止站立于测力板上,听到研究者口令:预备、1、2、3、开始,即开始前倾动作,在动作要求部分,要求受试者尽快向前倾斜至最大角度,且使躯干及下肢各关节成一直线,完成动作后,受试者需持续于最大角度处,直至听到研究者“停止”口令再回复至原来静止站立姿势。若受试者跨步出去或是脚移开原站立点时,则算实验失败,失败者则需多做1次实验,自然站立与并脚站立情况各需收集有效10次实验。而收集时间方面,受试者静止站立时间约3 s,完成动作时间约1 s,持续于最大角度停顿,总计数据获取时间为10 s。③实验步骤:校正 VICON三维动作捕捉系统及 AMTI 三维测力板。向受试者说明实验目的与流程,并填写同意书。平衡测试分为功能性平衡测试及前倾动作平衡测试。其中,功能性平衡测试项目包括,张眼单脚站立、闭眼单脚站立、闭眼双脚自然站立、张眼双脚并拢、闭眼双脚并拢。功能性平衡测试利用码表记录受试者平衡动作持续时间,以s为单位,若受试者能超过 60 s,则站立 60 s即停止;若每一情况下第1次站立时间未超过 60 s,则再测1次,2次测试记录中取较佳成绩进行统计分析。测量受试者身高、体重等基本资料,并在相应关节处粘贴反光球。在实验前,使受试者充分了解动作的要求,并给予5次练习机会,每次实验间给予受试者1 min的休息时间,而自然站立与并脚站立的实验任务间,则给予10 min休息时间以避免疲劳。使受试者光脚站立于固定点上,双手叉腰,使手的位置不挡到下肢的反光球位置,且不影响平衡反应。在实验时,由实验者随机要求受试者完成以下2种实验情况:双脚自然站立使身体向前倾斜至最大角度,或双脚并拢使身体向前倾斜至最大角度。为安全考虑,实验前先在受试者腰部系上安全腰带,研究者用手拉住腰带,但为避免干扰受试者执行动作,只当受试者跨步后无法自行恢复平衡时,才协助恢复受试者平衡。
1.3实验参数与处理
1.3.1参数定义 ①BOS:身体肢段在支撑表面所围成的面积;②稳定极限:在支撑底面积周边的界限即为稳定极限;③COM偏离度:在支撑底面积内,能主动移动COM的最大限度,以主动移动COM的最大距离除以足长的百分比;④COP:垂直地面反作用力的总作用所在位置,其大小代表接触地面的所有应力的平均值。COP值的位置,0%在脚跟,而100%则是在脚尖;⑤安全限界:此为稳定极限的研究参数之一,其数值即由脚尖的位置(100%)减去动作结束时COP值,以反映动作时平衡能力的天花板效应。
1.3.2数据处理 使用Vicon Nexus1.4版软件,进行运动学与动力学资料的同步与数字化处理,并利用 MATLAB R14 7.0版软件自行撰写的程序进行数据处理,将所获取各关节的原始坐标资料,以4阶巴特沃斯低通滤波进行平滑化处理,截止频率为10 Hz。
修匀过后的运动学数据,则利用 Dempster提出的人体肢段参数〔8〕计算人体COM位置(公式1)、COM动作速度与实际向前倾斜角度等参数。其中,COM动作速度以COM位移被时间微分所得,单位为m/s;COM倾斜角度以测量COM与踝关节连接,动作前与动作结束两者间的顺时针夹角所得。
COM=0.578×COMHAT+0.056×COMupper-arm+0.044×COMforearm+0.322×COMleg.
(1)
COMHAT为头、颈及躯干COM位置;COMupper-arm为上臂COM位置;COMforearm为前臂COM位置;COMleg为下肢COM位置。
修匀过后的动力学数据,计算动作开始与动作结束的COP值、COP偏离度。其中,COP偏离度,以足长进行标准化来降低个别差异。由动力学资料可得作用力及力矩值,COP值则为垂直地面反作用力的总作用所在位置,以 Y 轴上的COP值为例,其计算方式如公示(2)~(4)所示:
FZ×DY=MX,
(2)
DY=MX/FZ,
(3)
COPY=DYend-DYini/footlength×100%,
(4)
FZ为Z轴上反作用力值;MX为X轴上力矩值;DY为Y轴上COP位置;DYini为动作开始时Y 轴上COP位置;DYend为动作结束时Y轴上COP位置;footlength为Y轴上足长;而COPY为Y轴上COP值。
1.3.3动作分期 由运动学数据计算所得COM,利用其位移对时间微分所得的速度对时间作图,定义动作起始点与动作完成点(图1),当COM速度大于0 m/s 表示动作起始点;当速度首次降至负值之前为动作完成点。
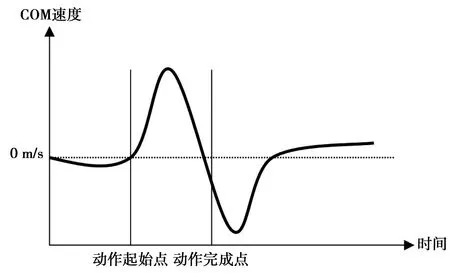
图1 动作起始点与动作完成点
1.3.4动量计算 假设身体前倾动作可简化为倒立单摆模型,并假设人体肢段在动作过程中为刚体结构,两侧对称,以便分析人体在前倾动作时水平方向线动量与角动量的差异。线动量与角动量的计算分别如下所示:COM线动量L=mV,其中m为COM质量,v为COM速度。COM角动量H=Iw,其中,I为转动惯量,ω为角速度。由于本研究以倒立单摆模型来简化人体动作的结构,因而其转动惯量如公式(5)所示〔9〕,r为COM对踝关节的距离;l为身高。
(5)

2 结 果
2.1功能性平衡与不同BOS下相关LOS
2.1.1功能性平衡 老年组与年轻组的功能性平衡测试最高测量至60 s,老年组不论张眼或闭眼,单脚站立均无法达到60 s;而年轻组只在闭眼单脚站立时无法达到60 s,且老年组与年轻组在单脚站立部分具显著差异(P<0.05)。见表1。

表1 两组功能性平衡测试
2.1.2COP的LOS 不同BOS下的前倾动作,两组COP的LOS结果组内差异无统计学意义,但组间均具有显著差异(P<0.05)。见表2。
2.1.3COM的相关LOS 不同BOS下的前倾动作,两组COM的LOS组内差异无统计学意义,但组间均具有显著差异(P<0.05)。见表2。

表2 两组身体前倾动作时COP、COM的
2.2不同BOS下的COM线动量 老年组与年轻组在不同BOS下,执行前倾动作时COM线动量结果见表3。各参数组内差异无统计学意义,组间具有显著差异(P<0.05)。图2为两组受试者前倾动作时线动量-时间关系。

表3 两组不同BOS下前倾动作的COM线动量

图2 COM线动量与时间关系
2.3不同BOS下的COM角动量 老年组与年轻组在不同BOS下,前倾动作时COM角动量结果见表4。各参数组内差异无统计学意义,角动量在组间具有显著差异(P<0.05),而最大角动量时间点则在组间无显著差异。图3为两组受试者执行前倾动作时角动量-时间关系。

图3 COM角动量与时间关系
表4 两组不同BOS下前倾动作的COM角动量
2.4LOS参数与COM线动量、角动量相关性 结果显示,线动量与角动量显著相关,且与COP偏离度、COM偏离度、倾斜角等参数呈正相关,而与安全限界呈负相关。见表5。

表5 LOS参数与COM动量的相关矩阵(r值)
2.5执行前倾动作时不同BOS下的COM线动量及角动量信度 根据Fleiss分类〔10〕,若ICC值大于0.75,则其具有较好信度,若小于0.45则为不良信度,而介于0.45~0.75,则视为中等信度。结果显示,无论在自然站立或并脚站立时,COM线动量的ICC值皆大于0.75,而COM角动量除了在自然站立时不同测试者间ICC值较低外,其余ICC值均大于0.75,显示具有较好的再测信度。而自然站立时COM角动量的ICC值为0.631 6,亦具中等再测信度。见表6。

表6 同一测试者同日再测信度与不同测试者间信度
3 讨 论
3.1COM线动量与前倾动作动态平衡关系 尽管运用动量研究个体平衡控制机制的可行性已得到证实,但不同年龄个体之间动量值是否存在差异未有共识,Reisman等〔11〕研究显示年轻人从坐到站的水平动量为20~30 kg·m/s,垂直动量为 30~60 kg·m/s,其量值受动作速度影响。事实上,以COM线动量量值探讨前倾动作LOS方面的研究较少,就实验结果而言,证实不同BOS下老年人与年轻人身体前倾时的线动量显著不同,支持Kaya等〔12〕的研究,不支持Jensen等〔13〕的研究,该研究认为在执行不稳定动作时,老年人与年轻人的COM或各肢段的水平动量并无差异(水平线动量标准化值,老年人1.0 kg·m/s,年轻人0.8 kg·m/s)。至于本研究中老年人线动量量值为3.3~3.7 kg·m/s,而年轻人的线动量量值为7.2~7.4 kg·m/s,且老年人与年轻人具显著差异。推究量值大小不同的原因,可能为本研究前倾动作的动态LOS要求较坐到站任务难度高。
本实验结果证实老年人与年轻人前倾动作时,最大线动量发生时间点在不同BOS显著不同。关于老年人的COM线动量最大值发生时间占动作时间百分比的相关研究中,并无直接实验数据可参考。而年轻人线动量最大值发生时间占动作时间百分比的相关研究中〔11〕,执行坐到站任务的水平线动量最大值发生时间点约在30%,而垂直线动量最大值发生时间点则在50%~60%。Commissaris等〔14〕在研究举物动作时,发现线动量最大值发生于动作开始后300~400 ms之间。就本研究结果而言,老年人线动量最大值约在动作周期63%左右,而年轻人则发生在动作周期52%~55%,支持上述研究。Pai等〔15〕研究坐到站发现,动量转折点与平衡控制极度相关,而本研究最大线动量发生时间点亦证实老年人与年轻人显著不同,因为年轻组最大线动量发生时间点较老年组早。
综上,运用COM线动量发现老年人与年轻人在不同BOS下前倾动作的动态平衡能力存在显著差异,说明老年人平衡能力存在显著退化的情形,支持Scarborough等〔16〕研究,说明老年人下肢肌力与线动量有显著相关,可能是因为动作的平衡目标并非在于维持COM稳定,而在于维持水平面动量稳定。由于线动量变化量为作用力与时间的积分,因此,COM线动量可作为测量平衡能力的参考指标〔17,18〕。本实验结果亦证实,老年执行前倾动作时COM线动量显著小于年轻人,显示其控制动态平衡能力下降,而最大线动量时间点显著大于年轻组,显示其推进冲量与制动冲量间的转移较差。
3.2COM角动量与前倾动作动态平衡关系 本实验结果证实在不同BOS下,老年人与年轻人身体前倾时动态LOS平衡能力上,COM角动量存在显著差异,支持Sheehan等〔19〕的研究。尽管角动量应用于平衡机制中前倾动作LOS的研究较少,但类似动作任务的研究中亦得到部分支持。至于老年人部分,有研究认为〔11〕老年人坐到站经标准化后的躯干角动量为0.01~0.11 kg·m2/s·rad/s,行走时躯干角动量为0.12~0.19 kg·m2/s·rad/s;年轻人坐到站的角动量-22~2 kg·m2/s·rad/s。而本研究所得的老年人COM角动量值为3.8~4 kg·m2/s·rad/s,年轻人则为6.4 kg·m2/s·rad/s,说明老年组与年轻组具显著差异。而最大COM角动量发生时间点方面,Commissaris等〔20〕的举物研究显示COM角动量最大值发生于动作开始后350 ms,尽管与本研究执行前倾动作任务不同,但结果一致的是,皆未能证实在不同BOS下老年人与年轻人有显著不同。COM角动量最大值发生时间占动作时间百分比的相关研究中〔11〕,年轻人执行坐到站任务时在70%左右。就本实验结果而言,最大COM角动量发生时间点虽未证实老年人与年轻人存在显著不同,但其中具有年轻组较老年组早的倾向。
综上,运用COM角动量研究可发现老年人平衡能力上显著退化,因为预期姿势调整主要以产生足够的角动量以有效执行平衡任务,推论髋关节伸展肌力与躯干角动量呈显著正相关,肌力较好者具有较高角动量,而较无力者则具较小角动量且采取较保守动作,支持Herr等〔21〕的研究。由于关节力矩亦可提供有效定义踝关节与髋关节策略的差异〔22,23〕,同时,在调整前倾动作的不稳定情况时,可利用踝关节策略维持平衡,提升最大踝关节力矩及踝关节力矩产生速率。基于物理学观点,角动量为力矩与作用时间的积分所得,本研究的前倾动作,属模拟人体倒立单摆形式,以踝关节为支点作旋转动作,因而利用COM角动量分析其平衡能力较具代表性,而实验结果显示,老年人前倾动作时,COM角动量显著低于年轻人,可能是老年人骨骼肌肉系统所能发挥的力矩显著下降所致。
3.3BOS与前倾动作动态LOS关系 尽管动态稳定性是人体COM与BOS间的关系问题已得到证实,但传统研究多以BOS小者,其LOS即较小为前提来评价平衡能力优劣〔24〕,多认为BOS大者平衡的挑战较小,不过也有研究〔11〕认为平衡与BOS大小无关。事实上,单纯人体COM位置和BOS间的关系已无法说明运动中的人体稳定性大小,还需要考虑COM水平速度〔25〕,因为人体COM位置和速度的综合效应才是维持个体动态稳定性的核心要素。鉴于此,为了提升预测跌倒概率,有研究〔26〕以COM开始位置与速度及扰动的相对时间来仿真最佳动态LOS。
就本实验结果而言,无论是老年组或是年轻组,在执行前倾动作时LOS参数中,COP偏离度、安全限界、COM偏离度、倾斜角度及动作开始前的COP值等,均显示不因BOS改变而有显著不同,COM线动量及角动量亦无此倾向,支持平衡与BOS大小无关的观点。究其原因,可能是动态平衡的目标不在于使COM稳定,而在使COM动量稳定,这就意味着与动作COM的位置、速度有关,而非BOS大小。Lee等〔27〕研究发现举物高度与脚,相较于功能性BOS的后侧位置有关,本研究动作本质非向上而是往前倾,但由COP偏离度及其动作起始时COP值的关系看来,COP值靠后者,其COP偏离度较大,与Lee等〔27〕研究结果不同。
此外,BOS对平衡的影响可能主要在于冠状面上,根据相关研究〔28,29〕,BOS大小会影响踝关节策略应用以致不利于平衡控制〔30,31〕,因为BOS对平衡的效应,在于身体侧向动作上,而非前后方向动作,推论踝关节策略在正常BOS时调整矢状面站立平衡〔32〕,而当BOS变窄时,调整平衡的策略则由髋关节负责,以调整冠状面的站立平衡为主〔33〕。本实验结果证实此推论,在利用前后方向动作参数检验BOS对平衡的影响方面,未发现有显著差异。
3.4COM动量参数与COP、COM的LOS参数相关度 利用COM动量分析前倾动作的平衡有其代表性,一般平衡研究多利用测力板或动作分析仪了解COP或COM的轨迹变化,并用以计算各类参数量化平衡能力。依据实验结果,COM线动量与角动量、COP的LOS参数及COM的LOS等参数具显著相关,且不论是COP偏离度、安全限界、COM偏离度、COM倾斜角度及动作开始前的COP值等,均显示老年组与年轻组具显著差异。相关研究也认为COM动量参数与平衡控制相关性高〔34〕,因此,利用COM线动量可详细比较平衡时的COM动态控制能力,至于最大COM线动量时间点,亦可分析平衡时推进冲量与制动冲量的转折。其相关性高的原因,利用物理学定义可发现,线动量大者,其角动量亦高;角动量的公式中I=mr2,其中r即为速度v,因而角动量可改写为mrv,与线动量mv具线性相关。而线动量与COP偏离度、COM偏离度及倾斜角呈显著正相关,可能原因为线动量属驱动COM移动的物理量,表现在COM移动的轨迹参数上〔35〕。Jadelis等〔3〕研究发现,将后倾时COP偏离度作为评价老年人动态平衡能力的指标,其膝关节肌力仅可解释18.4%的动态平衡能力,而体重指数(BMI)、性别、足长及膝盖疼痛的情况等,仅可再解释另外的6.7%,显示仍有绝大多数动态平衡能力尚无法由肌力及一般参数所解释。近年来研究COM动态平衡的LOS,主要以两种形式为参数,分别为力矩界限与状态界限,Patton等〔4〕提出力矩界限与状态界限高度相关,并认为中枢神经系统以状态界限作为控制平衡回馈的重要参数。本研究以状态界限为安全限界参数的计算,结果显示老年人与年轻人显著不同;而COM线动量与安全限界呈负相关,显示在动态平衡能力上,个体的平衡LOS的限制越大,驱动COM的能力越小;可由此分析动态平衡能力退化程度,因而COM动量参数可作为评价老年人动态平衡能力的良好参数。
COM动量与LOS参数极度相关,证实动量分析动态平衡能力具有代表性,加之关节力矩可提供有效定义踝关节与髋关节策略〔23〕,将来可以此重新定位受试者动作,进一步研究老年人髋关节与膝关节退化情形。同时,未来亦可针对COM动量分析诸如行走、跑步、跳跃等基本动作的平衡能力及长期运动老年人的平衡能力是否显著退化。
综上,本研究得出以下结论与建议。结论:①老年人与年轻人在前倾动作的动态稳定极限平衡能力上,COM线动量和角动量皆存在显著差异。②COM线动量及角动量,与COP及COM稳定极限参数之间呈显著相关。③运用COM线动量及角动量参数,可作为分析和预测老年人动态平衡能力的有效路径。建议:①给予老年人平衡运动处方时,除训练肢体活动能力及肌耐力外,亦需考虑训练其动态平衡能力中质心动量显著不同的情形。②促进老年人动态平衡提升,应以增加其在不同质心位置控制质心速度的能力为优先考虑,如太极拳、柔力球及瑜伽等,均是训练质心动态稳定极限的动作类型,对老年人平衡训练具相当效益。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年9期)2020-10-27
中学生数理化(高中版.高考数学)(2020年1期)2020-02-20
科学之谜(2019年2期)2019-03-25
成长·读写月刊(2019年1期)2019-01-28
中学物理·高中(2017年12期)2018-03-07
中国空间科学技术(2017年6期)2018-01-15
理科考试研究·高中(2017年7期)2017-11-04
新高考·高一物理(2016年11期)2017-07-07
新课程·中旬(2016年11期)2017-02-10