基于目标搜索与识别的智能车追踪系统
2020-09-02 12:38刘潇威朱泓宇胡艺杨喆辰赵春锋
现代计算机 2020年21期
刘潇威,朱泓宇,胡艺,杨喆辰,赵春锋
(上海工程技术大学工程实训中心,上海201620)
0 引言
全国大学生“恩智浦”杯智能汽车竞赛由教育部高等教育司委托教育部高等学校自动化类专业教学指导委员会主办、以智能汽车为研究对象的创意性科技竞赛。2019 年第十四届“恩智浦”杯智能车竞赛中,设立基于麦克纳姆轮车模的信标对抗组竞赛。本文分析了麦克纳姆轮车模运动原理,如何识别信标灯塔信号,并给出了目标追踪路径处理方法。
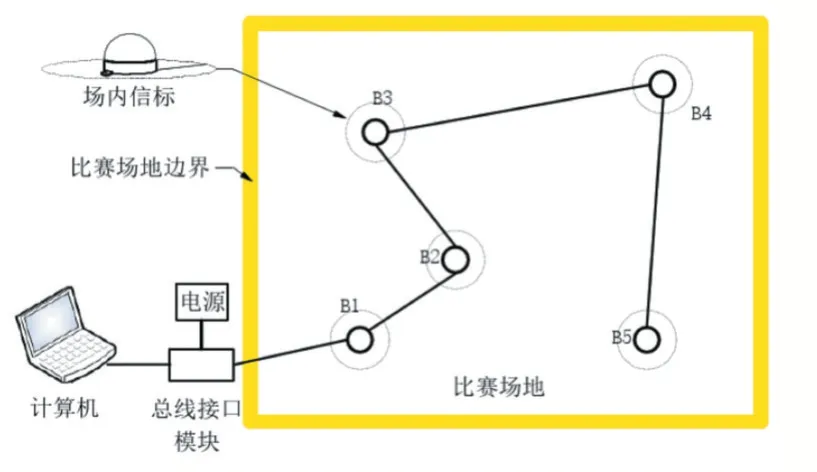
图1 比赛场地示意图
信标对抗组的比赛场地设置在铺设有蓝色的广告布平整的地面上,如图1 所示。场地区域约为5×7 米,四周铺设5cm 宽度的黄色胶带。开始比赛后,比赛裁判系统自动启动第一个信标灯并发送光引导信号,此时AGV 小车能够识别信标引导方位并做定向运动。当AGV 小车上安装的磁标进入信标的感应范围后,第一个信标灯熄灭。比赛裁判系统自动切换控制下一个信标灯同样发送光引导信号,AGV 小车前往第二个信标灯并将其熄灭。随机依次反复10 次左右,从第一个信标点亮到最后一次信标熄灭为止AGV 小车运行时间作为竞赛成绩排名。
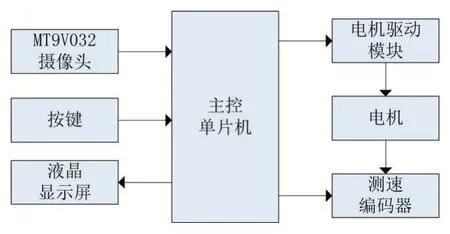
图2 系统概述示意图
1 工作原理概述
基于麦克纳姆轮车模AGV 小车的整个系统分为为机械结构、电路硬件、程序算法三部分。工作过程为:摄像头采集赛场上的图像输入单片机LCP54606,经过图像二值化处理确定闪烁的信标灯的坐标位置,计算车模轨迹。单片机输出PWM 信号到电机驱动模块,控制四个麦克纳姆轮差速运动,四个电机轮分别安装光电编码器,实时电机转速反馈脉冲信号到单片机,从而实现四个麦克纳姆轮的控制PID 算法闭环控制。控制系统示意图如图2 所示。
2 麦克纳姆轮运动学原理
麦克纳姆轮AGV 小车运动状态有两个速度矢量,线速度与绕自身旋转的角速度。因此首先假设麦克纳姆轮AGV 小车坐标系建立在小车几何中心,速度矢量v→,旋转矢量ω,如图3 所示。
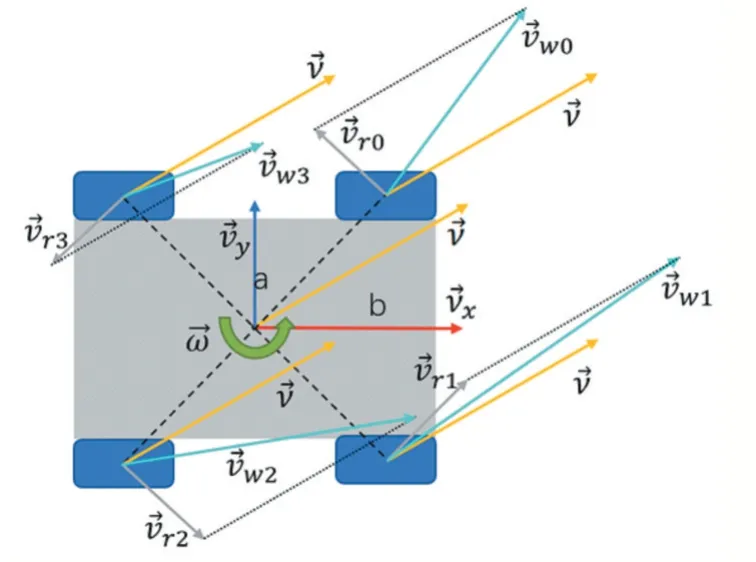
图3 麦克纳姆轮运动学分解图
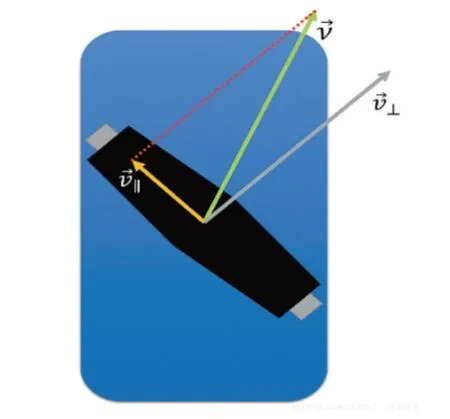
图4 车辊的速度矢量分解图
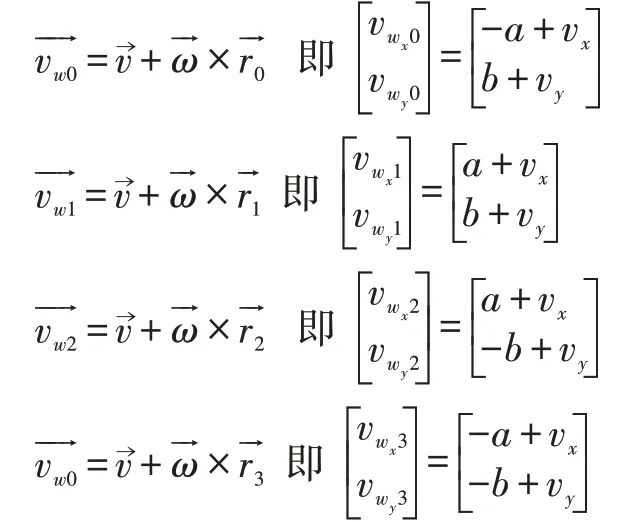
(1)麦克纳姆轮行进速度分析
麦克纳姆轮AGV 小车的运动状态由车轮的运动决定,那么对每个车轮而言,其相对于世界坐标系的运动合成速度矢量必然有两个分量,轮子轴心沿垂直于车体中心旋转速度分量和轮子轴心的运动速度矢量,如图2 所示。

为轮子轴心沿垂直于方向(即切线方向)的速度分量,为:

:从小车几何中心指向车轮几何中心的矢量。
将式(2)代入式(1)得速度矢量:

设a,b 为1/2 长和宽,则四个麦克纳姆轮的速度分解如下:
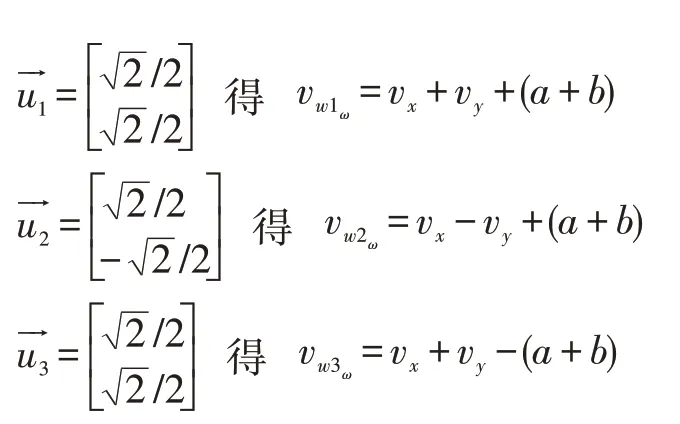
(2)麦克纳姆轮转速分析
麦克纳姆轮行进速度矢量对车轮而言,分解为垂直于车辊和平行于车辊的速度矢量如图4所示。麦克纳姆轮车辊中轴自由运动,垂直速度矢量直接作用于车辊中轴,提供车辊绕中轴旋转的角速度,对小车行进而言无作用。

矢量是平行于车辊的单位矢量。

将式(4)代入式(5)得速度矢量:

则四个麦克纳姆轮的车轮转速如下:

3 目标识别及追踪策略
信标灯塔实物示意图如图5(a)所示,以两种信号组合的方式作为引导信号,如图5(b)。信标灯塔红外光为占空比50%的方波信号,闪烁周期为100ms,并且红外光进行了40kHz 调制。
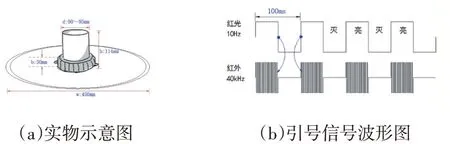
图5 信标灯
(1)目标识别
整个场地为5×7 米,选择视野宽广的全局摄像头MT9V032 采集场地信息。MT9V032 拍摄图像为180×120 灰度(0-255)像素,设置的参考帧率为50 帧/秒,满足使用要求。灰度图像含有赛场环境较为复杂的信息,需要对灰度图像再进行二值化处理,即将复杂的图像简化为0 或255,呈现明显的黑白效果。实时调节阈值算法可以更好地适应赛场环境,减小干扰,所有灰度大于或等于阈值的像素点被判定为属于背景,灰度值用0xFF 表示,其余灰度值为0×00,表示信标目标图像。如图6 所示。
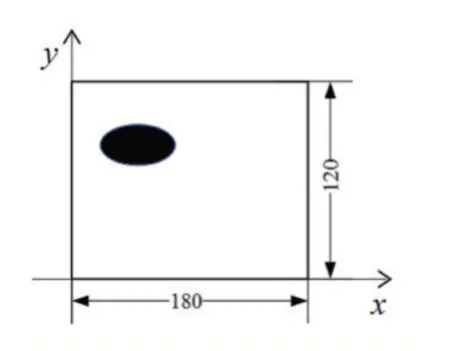
图6 二值化图像
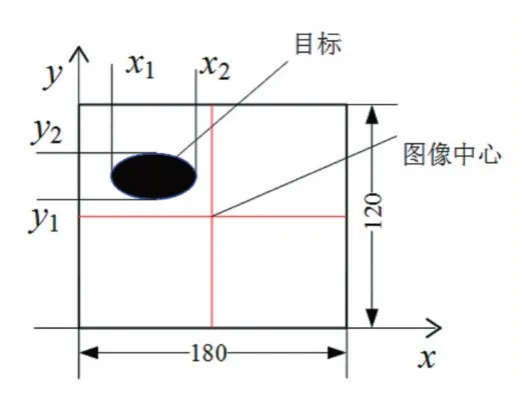
图7 目标位置计算
(2)目标追踪
对于二值化图像,搜索光斑最宽行、最宽列,可确定出灯塔目标图像的圆斑中心点坐标,图7 为信标灯塔位置计算示意图。以中心坐标偏差作为循迹方向,通过对麦克纳姆轮电机的控制,使小车进行小幅度横移和减速,从而达到可以成功避过信标灯,但又能成功灭灯的效果。
4 结语
本文以第十四届“恩智浦”杯全国大学生智能汽车信标对抗组竞赛为背景,以麦克纳姆轮车模为基础,通过安装摄像头、设计控制电路和编写控制程序,制作成目标搜索与识别的AGV 追踪智能小车。软件进行图像采集,通过二值处理确定目标灯塔中心位置,经过麦克纳姆轮运动解算控制四个麦轮转动达到追踪目的。目标搜索与识别以及麦克纳姆轮运动解算在第十四届“恩智浦”杯智能汽车竞赛中得到实际的应用并取得了一定的成绩。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
舰船科学技术(2021年7期)2021-08-11
经营者·汽车商业评论(2016年5期)2017-11-30
现代电子技术(2017年11期)2017-06-12
发明与创新·大科技(2016年5期)2016-05-17
新高考·高一物理(2016年1期)2016-03-05
现代电子技术(2014年19期)2014-10-17
现代营销·经营版(2013年10期)2013-05-14