干摩擦对行星齿轮传动系统分岔特性的影响分析
2020-09-04 02:47王靖岳王浩天
科学技术与工程 2020年22期
王靖岳,刘 宁,王浩天
(1. 沈阳理工大学汽车与交通学院,沈阳 110159;2.重庆大学机械传动国家重点实验室,重庆 400044;3.沈阳航空航天大学自动化学院,沈阳 110136)
齿轮系统在传动过程中啮合副之间不可避免存在摩擦,同时齿面摩擦的时变性也是系统振动的重要激励源,而对于结构复杂的行星齿轮系统其非线性特性也更加复杂,吸引了中外大量学者对齿轮系统的非线性动力学特性进行研究。
Kahraman等[1]首先将间隙和刚度非线性因素耦合一起分析齿轮系统的动力学特性。在此基础上,摩擦与其他非线性因素也被考虑到齿轮建模中,尹桩等[2]建立包含齿面冲击和摩擦的单自由度齿轮模型,分析啮合力的变化对系统运动状态的影响。张笑等[3]在考虑摩擦因素的基础上,又在齿轮建模时考虑了温度效应,分析齿轮系统的非线性特性。刘志宇等[4]基于单对齿轮副的弯扭耦合模型,分析系统随各种参数变化时,齿面摩擦对系统分岔特性的影响。刘晓洁等[5]以动力学分析软件为途径,研究不同摩擦系数下双圆弧齿轮系统的动力学性能。
针对行星齿轮系统,朱恩涌等[6]通过库伦摩擦力,推导出包含摩擦力的行星齿轮微分方程组,只是简单得到不同摩擦系数下系统振动位移曲线,并进行了对比分析。郇立荣等[7]针对含故障的行星齿轮系统,以随机风载为激励源分析齿轮系统的动态特性。Zhao等[8]建立具有两个行星齿轮级和一个平行齿轮级的风力机齿轮箱的扭转振动模型,得出外部激励对风力机齿轮箱扭转振动的影响最大。Xiang等[9]建立了由行星齿轮和两个平行齿轮组成的多级齿轮传动系统的非线性扭转模型,得出该系统具有丰富的非线性动力学特征,如周期运动、非周期运动和混沌状态。Hou等[10]以发动机转子系统为研究对象,建立行星齿轮-转子非线性动力学模型,得出系统同样具有丰富的非线性行为,但是以上行星齿轮建模并没有考虑摩擦因素。
基于以上研究,齿面摩擦对行星齿轮分岔特性影响的研究很少。本文建立行星齿轮扭转模型,建模时在考虑齿隙、刚度等基本非线性因素基础上,也考虑了齿面摩擦,以不同摩擦系数为切入点,利用分岔图和最大Lyapunov指数图(largest Lyapunov exponent,LLE)分析系统分岔与混沌特性,用Poincaré截面图、相图、时间历程图和频谱图进一步说明摩擦对行星齿轮系统非线性动力学特性的影响。
1 系统动力学建模
如图1所示,采用集中质量法建立行星齿轮扭转动力学模型,各啮合齿面间以弹簧-阻尼系统连接,同类型构件齿隙、综合误差相同。

c代表行星架;r代表齿圈;s代表太阳轮;pn代表第n个行星轮(n=1,2,…,N);uc、ur、us、un分别表示行星架、齿圈、太阳轮、第n个行星轮的扭转位移图1 行星齿轮系统动力学模型Fig.1 Dynamic model of planetary gear system
采用牛顿定律建立行星齿轮系统动力学微分方程:
(1)
式(1)中:j=s、c、r、n,i=sn、rn,sn为外啮合副,rn为内啮合副;Ij为转动惯量;rj为基圆半径;Fi为动态啮合力;fi为摩擦力;Li为摩擦力臂;T1为输入扭矩;T2为输出扭矩。

啮合线上轮齿相对位移函数(图2)可以表示为
(2)
式(2)中:δi为齿轮副啮合点的相对位移;bi为齿侧间隙的一半。
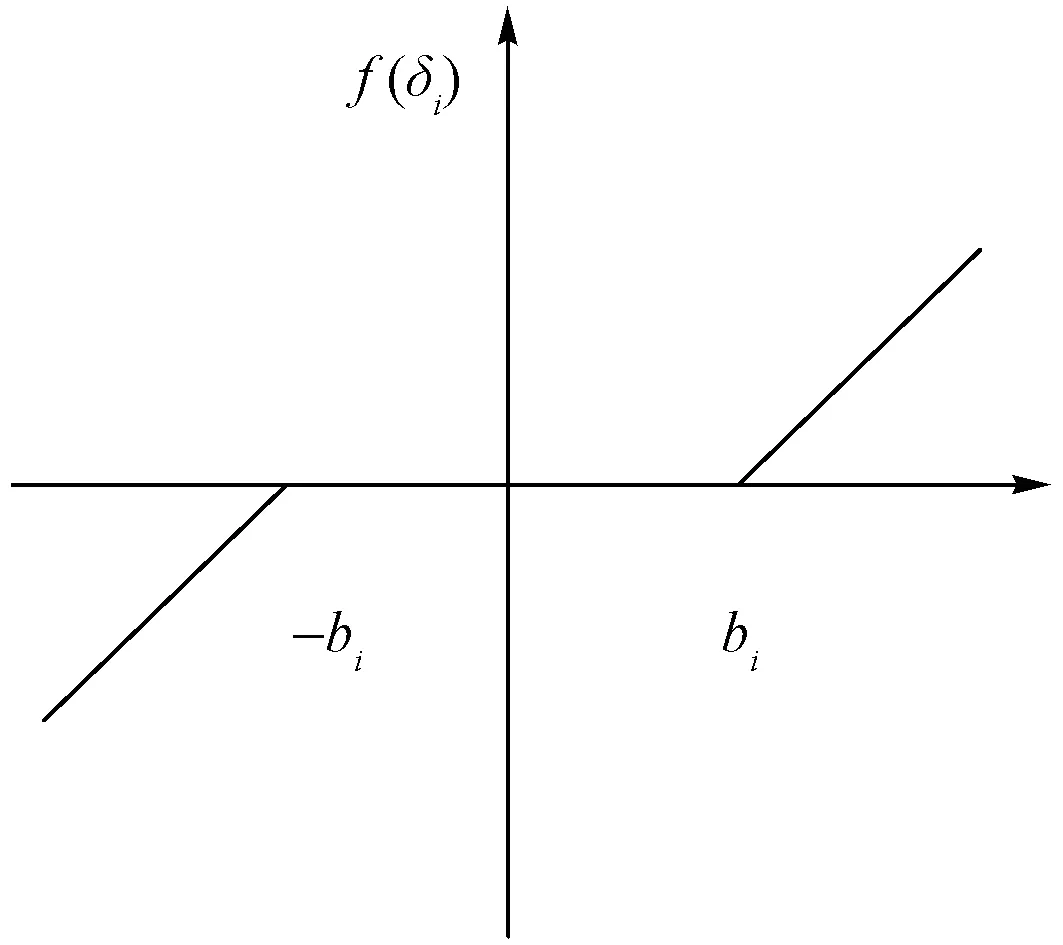
图2 齿侧间隙非线性函数Fig.2 Nonlinear function of backlash
齿面间摩擦力公式可以表示为
fi=λiμFi
(3)
式(3)中:μ为摩擦系数;Fi为轮齿间啮合力;λi为摩擦力方向系数[12],其定义为
(4)
式(4)中:Lp为主动齿轮p的时变摩擦力臂;rp为主动齿轮p的基圆半径;α为压力角,x=Lp-rptanα。 以外啮合齿轮副为例进行分析,图3为齿轮外啮合过程,随着齿轮啮入,到达理论啮合点P,摩擦力方向改变,啮合点到达B2,新的轮齿啮入。N1N2为理论啮合线长度,B1B2为实际啮合线长度,rs、rn为太阳轮和行星轮基圆半径,ras、ran为太阳轮和行星轮齿顶圆半径,忽略齿轮接触时的啮入啮出变形[12-13],则太阳轮与行星轮之间的摩擦力臂为
(5)
式(5)中:Lsn(t)为相对于太阳轮的力臂;Lns(t)为相对于行星轮的力臂;εsn为外啮合副的齿轮重合度系数;Spb为基圆齿距。
同理,内齿圈和行星轮之间的摩擦力臂为
(6)
式(6)中:Lrn(t)相对于内齿圈的力臂;Lnr(t)相对于行星轮的力臂;εrn为内啮合副的齿轮重合度系数;rar为内齿圈齿根圆半径;rr为内齿圈基圆半径。
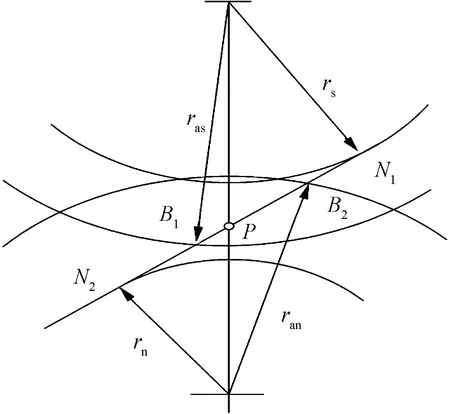
图3 齿轮副外啮合示意图Fig.3 Schematic diagram of external gear pair
为了消除刚体位移和使系统方程数目减少实现降维,引入内外啮合副的相对位移δ,太阳轮、内齿圈分别相对于行星轮产生的相对位移为
(7)


(8)
2 齿面摩擦对系统分岔特性的影响分析
采用Runge-Kutta数值方法求解行星齿轮系统动力学方程,以太阳轮和行星轮的相对位移δsn为例进行分析。行星齿轮系统的基本参数如表1所示[14],选取系统的基准参数:刚度系数k=0.25,内啮合副平均刚度ksnav=4.37×108N/m,外啮合副平均刚度krnav=5.65×108N/m,刚度初始相位φi=0,误差初始相位γi=0,误差幅值Ei=3 μm,阻尼比ζ=0.088,扭矩T1=100 N·m,间隙bi=50 μm,行星轮个数n=3。
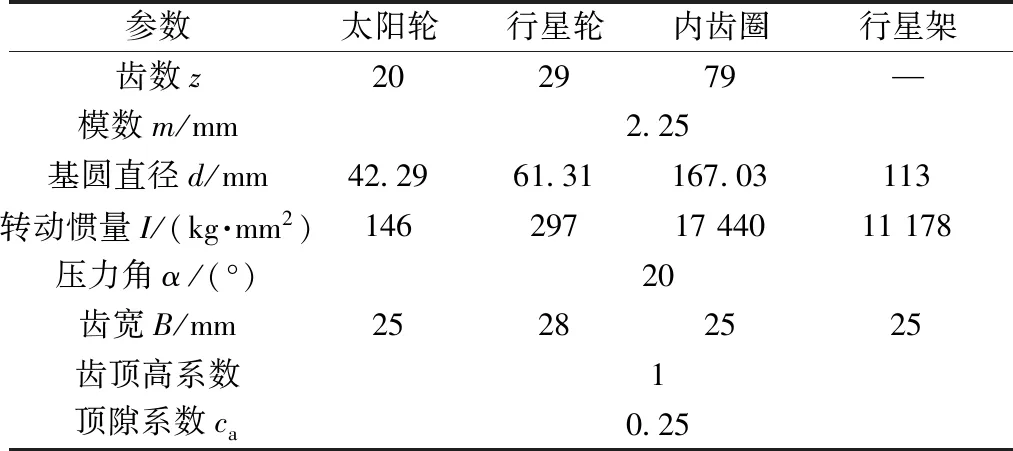
表1 行星齿轮系统基本参数
当μ分别为0、0.1和0.2时,以无量纲激励频率Ω为分岔参数,系统的分岔图和LLE图如图4所示。
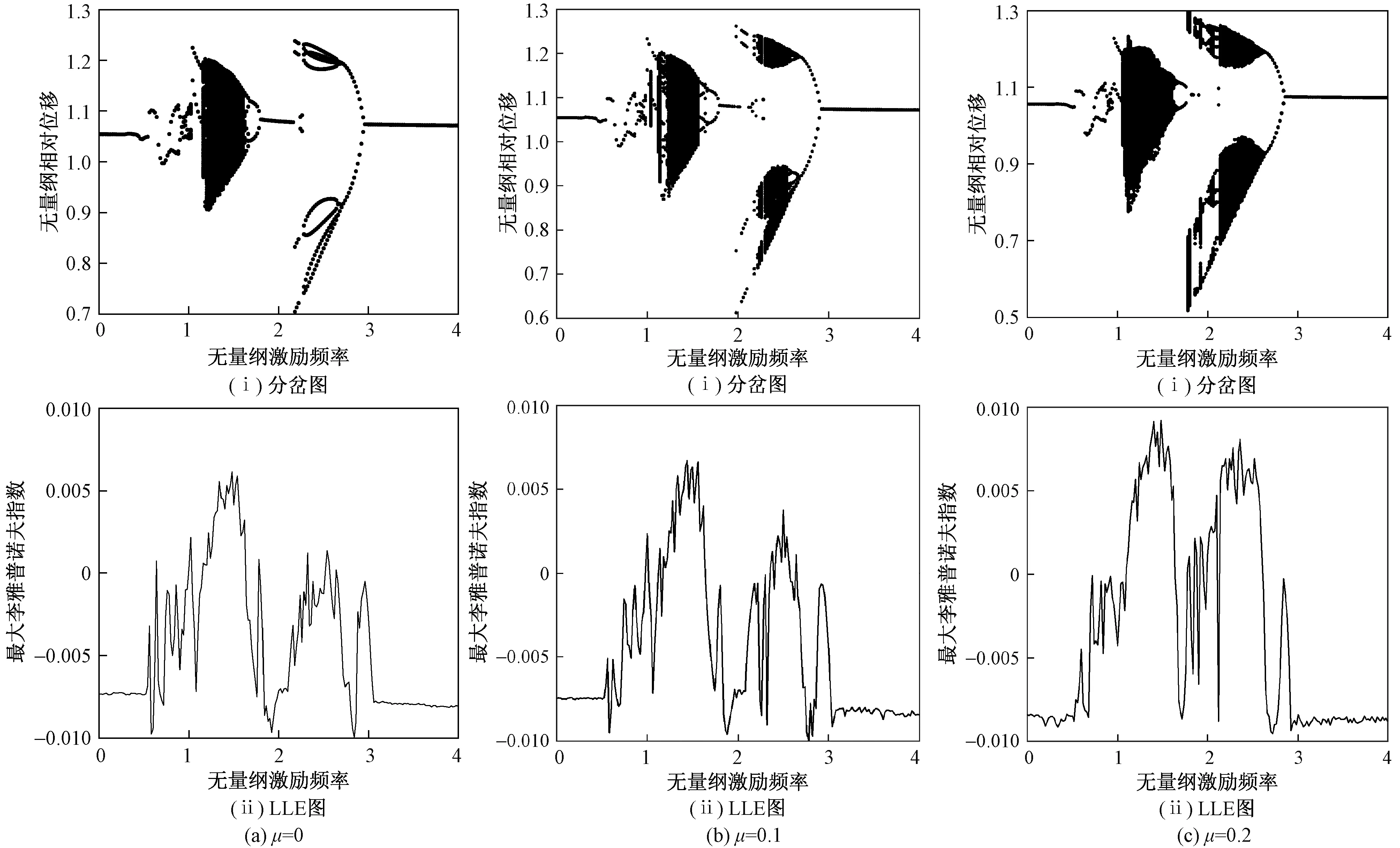
图4 系统随Ω变化的分岔图和LLE图Fig.4 Bifurcation diagram and LLE diagram of the system with Ω
从图4(a)中可以看出,随着Ω的增加,系统首先经历周期运动,经Hopf分岔和激变进入混沌运动,之后经过逆倍化分岔再次进入周期运动。当Ω在[0, 1.14]区间时,系统主要为周期运动,伴有一段短暂的混沌运动,对应的LLE主要在负值区域;当Ω在[1.14, 1.52]区间时,系统为混沌运动状态,LLE为正;当Ω在[1.52, 4]区间时,系统主要为周期运动,伴随短暂的混沌运动,对应LLE图为在正值区域有几处尖峰。
对比图4(a)、图4(b)可以看出,当考虑齿面摩擦时,在低频区域,系统的分岔行为基本没有改变,说明摩擦对低频区域影响较小;在高频区域,系统运动状态发生改变,分岔行为变得模糊,同时系统稳定的周期运动转变为非稳定的混沌运动,导致混沌区域增加,这说明摩擦对高频区域影响较大。
从图4可以看出,随着摩擦系数的增加,在低频区域,系统混沌区域夹杂的周期窗口消失;在高频区域,系统的多倍周期运动减少,混沌运动区域增加的更多,进入混沌运动的临界频率提前,对应LLE图中正值区域增加,混沌运动区域增加。
这是由于系统转速较低时,摩擦的迟滞效应表现不明显,当转速增大到一定临界值时,摩擦迟滞效应明显,增加了啮合齿面间的啮合力的波动,导致系统运动状态不稳定(混沌运动)。同时系统退出混沌运动的临界点没有改变,进入混沌运动的临界点提前,最终导致系统混沌运动区间增加。
结合Poincaré截面图、相图、时域图和频谱图,进一步说明摩擦对系统随Ω变化的影响,取无量纲激励频率Ω为2.32,当μ=0时,系统为8周期运动状态,如图5所示;当μ分别为0.1和0.2时,系统为混沌运动状态,如图6、图7所示。

图5 μ=0时,系统的8周期运动Fig.5 The 8-period motion of the system with μ=0

图6 当μ=0.1时,系统的混沌运动Fig.6 Chaotic motion of the system with μ=0.1

图7 当μ=0.2时,系统的混沌运动Fig.7 Chaotic motion of the system with μ=0.2
对比图5,从图6中可以看出,系统Poincaré截面图上的8个离散点变为密集的离散点集;相图显示为相轨迹无规则循环缠绕;时间历程图呈现出系统响应为幅值跳跃的非周期运动,振动位移幅值减小;频谱图显示为基频和分频处存在尖峰,伴随明显的噪声背景。对比图6、图7可以看出,系统Poincaré截面图上混沌吸引子更加发散;相轨迹在相空间的范围稍有减少;系统振动位移幅度也减小;功率谱中基频幅值功率降低。
3 结论
建立考虑齿面摩擦、综合误差和齿隙等非线性因素的行星齿轮扭转振动动力学模型,采用Runge-Kutta数值方法,研究了系统随激励频率变化时的运动状态和分岔行为,同时分析齿面摩擦对系统分岔特性的影响,得出以下结论。
(1)行星齿轮系统的分岔特性复杂多变,同时存在Hopf分岔、跳跃激变、倍化分岔和逆倍化分岔行为。
(2)考虑齿面摩擦时,在低频区域,摩擦对系统的分岔行为影响较小;在高频区域,系统分岔行为变得模糊,混沌区域增加,摩擦对高频区域影响较大。
(3)随着摩擦系数的增加,系统在低频区域的周期窗口消失和高频区域的多倍周期运动区域减少,系统混沌运动区间增加。
猜你喜欢
西北工业大学学报(2022年3期)2022-07-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
南京工程学院学报(自然科学版)(2021年4期)2021-02-23
河南科技大学学报(自然科学版)(2020年1期)2020-12-27
百科探秘·航空航天(2020年6期)2020-07-09
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
中南大学学报(自然科学版)(2019年2期)2019-03-06
读者(2018年20期)2018-09-27