基于PLC的网络化伺服控制系统实验平台研究
2020-09-07 07:47张怀宇
四川职业技术学院学报 2020年4期
赖 华,张 强,张怀宇,王 瑞
(宜宾职业技术学院,a.智能制造学院,b.汽车与轨道交通学院,四川 宜宾 644003)
0 引言
全球第四次工业革命已经到来,引领装备制造业进入数字化道路,企业的网络应用也是越来越广泛。但高职院校中大部分的PLC控制技术学习仅停留在简单的逻辑控制训练[1],少部分高职院校的实习设备中有伺服控制技术,也仅局限于设备控制功能的实现,只能作为单一技能的训练及近距离操作。如何提高试验平台的利用率和网络化建设,实现纵向和横向集成的自动化平台是本系统研究的主要内容。
1 实验平台的总体方案设计
实验平台建设的目的:第一解决高职院校实验建设经费的不足,低成本引进新技术;第二解决实验设备使用率不高的问题;第三实验平台使用功能不断扩展和延生。实验平台建设的总体要求有以下几点:①构建一个完整的实践教学项目;②平台的功能全面,技术先进;③开放的结构体系;④网络化实验平台[2]。
目前国际市场上产品的销售及新产品的研发都趋向于交流伺服控制系统。在工业发达国家,企业使用的伺服控制系统80%甚至更高都是交流伺服控制系统。与社会市场的需要保持同步,平台选择电气交流伺服系统是最理想的。系统结构框架如图1所示:

图1 系统结构框架图
2 实验平台的硬件系统设计
在保证系统的安全可靠运行,简单、经济、使用及维修方便,可扩展性强的原则下进行设备的硬件选择。二维工作平台的运动控制是通过交流伺服电机带动传动机构丝杠来实现精确定位控制。选择自带增量式编码器的永磁伺服电机和自带绝对式编码器的永磁伺服电机。西门子1FK7标准永磁同步伺服电机有一个好处就是带有DRIVE-CLiQ接口[3],便于系统的组态,构建数字化通信。针对伺服电机型号的选择,提高系统控制的精度及结合工业环境的实际运用,在全集成自动化技术的领域应用操作。选择西门子S120变频器作为伺服驱动器[4]。控制器采用CPU314C-2PN/DP控制器通过PROFINET网络连接远程I/O模块ET200S[5],通过PROFIBUS网络连接了S120驱动器,构成了一个设备网。如图2所示。
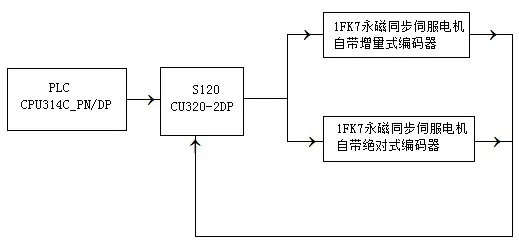
图2 电气硬件组成示意图

图3 实验系统网络搭建示意图
S7-300作为主站控制器,具有PROFIBUS和PROFINET的通信功能。S120作为从站执行驱动器,具有PROFIBUS通信功能,具有DRIVE_CLiQ接口。伺服电机作为执行机构,具有DRIVE_CLiQ接口。S7-300发出信号和接收S120的信号,实现伺服电机的速度、位置控制功能。S120接收和发送数据,与S7-300进行通信,并接收编码器反馈回来信号进行速度、位置处理,并将处理的结果发送给执行机构伺服电机完成,整个系统简单明了。
3 系统网络构建
实验网络系统构建能够模拟工业生产现场的网络建设,在各个环节中体现出相应的控制设备,能够充分展示出现有广泛使用的工业网络技术,也能更好地将本系统网络集成在其它网络中。实验系统的网络搭建如图3所示。
伺服电机通过一条动力电缆和一条DRIVECLiQ电缆与S120相连接,将电机的运行状态和编码器的信号传送给S120处理。S120可以独立控制现场设备,又可以通过上一级S7-300PLC来实现控制功能,它们之间通过PROFIBUS网络进行通信,S7-300PLC作为PROFIBUS的主站,S120作为PROFIBUS网络的从站。通过工业以太网交换机,可以构成一个混合型的拓扑结构[6]。S7-300连接了一个远程的ET200S设备,作为PROFINET网络中的一个I/O设备,完成远程控制功能。S7-300又作为PROFINET网络中的控制设备,TP177触摸屏作为PROFINET中的监视设备,实现了被控对象层与控制层网络的构建[7]。该实验设备又可以通过以太网实现整个局域网的连接,构建出网络管理层。
在实验室网络构建中,通过S7-300PLC将PROFINET与PROFIBUS系统实现了无缝连接。S7-300PLC即作为PROFINET网络中的一个站点,又是PROFIBUS中的一个主站,在中间起着协调数据的传输[8]。在这种集成的方式下,能够很好地保护用户对现有现场总线系统的投资。

图4 速度trace图形
4 系统的运行调试
运用 STARTER、STEP7 V5.5、TIA Portal软件完成整个实验平台的通信组建,通信调试正常。通过程序设计及人机界面组态,能实现了二维平面的点动、回零、定位控制功能[9]。速度控制采用了PI控制器,可以对速度的幅值进行限制,采用自适应调节功能自动设定比例增益和积分时间,以达到速度的最优控制。
上面这个画面(如图4)是系统运行的速度值之间的一个对比图,实际速度值和通过速度控制器后得到的一个波形图,从图4速度trace图形中可以看出,系统的速度的平滑性大大的增强了,通过验证系统能够很好的运行。
5 结论
针对高职院校实验设备相对较简单的现状下,建立一个与工程实践项目应用类似的一个实验平台,搭建了一个实验室的工业网络。结合最新的技术以及生产应用,建立了一个基于S7-300的网络伺服控制系统。网络化实验平台不仅可以作为单一技能的训练,又可以作为综合技能的训练。系统包含的知识面广,涉及到传感器、运动控制、变频器、通信等多方面的知识。平台实现网络化控制,整个系统的开放性强,可以任意组建及拓展。通过该实验平台可以减少对设备数量的投入,减少经费投入,增加设备的利用率,增强了在运动控制、通信联网等方面的学习,满足培训需求。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
微特电机(2020年11期)2020-12-30
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
军事运筹与系统工程(2017年4期)2017-08-29
电子制作(2016年1期)2016-11-07
中国教育技术装备(2015年4期)2015-03-01
中国人民大学学报(2014年5期)2014-04-16
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28