
一种基于协同定位技术的集体检测算法
2020-09-09 03:09黄海生
计算机应用与软件 2020年9期
袁 凡 黄海生 李 鑫
(西安邮电大学电子工程学院 陕西 西安 710121)
0 引 言
“城市峡谷”是一种类似于自然峡谷的都市环境,以街道切割周围稠密的高层建筑物。随着GPS技术的普及和电子产品的更新换代,越来越多的手持设备中集成了GPS模块,用户在城市峡谷中的定位需求与日俱增。城市中高层建筑物的形状、厚度等使信号强度衰减约10~25 dB[1]。普通接收机是针对-130 dBm标称信号开发的,城市峡谷环境中信号的恶化程度超出了普通接收机的处理范围[2],信号难以被正确处理并应用于定位过程。
国内外研究人员针对该问题提出了多种解决方案,主要有以下三方面:
(1) 信号处理的方案。消除强信号的干扰[3-5],捕获和跟踪弱信号时,弱信号的自相关结果与强信号和弱信号的互相关结果非常相近,可能导致误捕获。采用加长积分时间的方法捕获弱信号[6-9]。相干-差分相干积分方法,将相干积分结果进行差分处理,延长积分时间[10-13]。用全比特法避免数据相位变化引起积分损耗。
(2) 地图匹配方案。待定位用户事先存储城市3D建筑模型,结合星历数据对城市峡谷街区内每个位置的卫星可见性进行估计,并和实际接收情况进行捆绑匹配,判断该位置是否可能是用户的位置[14]。地图匹配方案典型的应用还包括图像匹配法、3D射线模型 预测法、指纹定位技术等。定位精度随着卫星数目的增多而提高。此方法的主要缺陷是需要建立城市的3D模型并存储,增大了工作量和建设成本。
(3) 协同定位方案[15-17]。协同定位首次提出是应用于多机器人定位研究,通过多个未知节点之间相互传递信息、互相测向、测距等功能辅助待定位节点完成定位。节点可以是基站、伪卫星、无人机、移动手机等,都是直接或者间接利用测距的方法得到待定位用户的位置。
1 集体检测原理
图1为城市峡谷中接收场景图,待定位接收机(Mobile Station, MS)位于城市峡谷环境中,建筑物的遮挡使卫星信号衰减。辅助接收机(Reference Station, RS)处于开阔区域接收状况良好,RS通过通信链路把辅助信息发送给MS。

图1 城市峡谷中接收场景图
图2为一颗卫星接收场景示意图,其中φs、hg分别为卫星在ENU坐标系中的方向角和高度角;以RS为坐标原点,MS′为用一定步长将有效区域进行划分后得到的一系列过程点,位置改变量为(ΔN,ΔE,ΔU),ΔB是接收机的时钟差。

图2 一颗卫星接收场景示意图
产生的伪距改变量Δρ为:
Δρ(ΔN,ΔE,ΔU,ΔB)=-cos(φs)cos(hg)ΔN-
sin(φs)cos(hg)ΔE+
sin(hg)ΔU+c·ΔB
(1)
过程点MS′处估计的伪距为:
在本节中,根据上述级联模型,探讨ER随机网络的级联故障,其中网络边通过不同DD策略定向.目的是为了分析,对于一个给定随机网络,边定向方法对网络抵制级联故障鲁棒性的影响.在基于MATLAB的数值仿真中,网络规模N=1 000,平均度
(2)
式中:ρRS为RS处的伪距。根据码相位与伪距的关系[18],逆推出码相位为:
(3)
在传统的捕获过程中,用本地复制信号与接收机收到信号做相关。相关结果如下:
(4)

(5)

(6)

(7)

按照预先确定的步长遍历搜索区域中每一个过程点MS′,并估计该点对应的集体检测量。RS、MS所有共视卫星的集体检测量是以空间区域中某一位置坐标为自变量的函数,用强信号增强了弱信号,得到一个更加明显的相关峰值。当集体检测量取得最大值时,相应的空间位置即为MS位置。由于RS和MS位于同一水平面上,所以可以忽略MS垂直方向的坐标估计。
2 集体检测算法流程
图3为集体检测算法的流程。

图3 集体检测算法流程图
选取搜索范围和步长,计算该范围中每点处的Δρ,根据码相位与伪距的关系,逆推出伪距与本地信号码相位之间的关系。相关结果取得最大值时的码相对应搜索区域中的位置即为MS的估计位置。若位置精度未达到可接受的范围,则缩小搜索区域和步长重复上述步骤。直到位置精度达到可接受的范围,完成MS的位置估计。
3 实验结果分析
城市环境中的MS有不同的接收场景,MS和RS的共视卫星数目大于两个,并且MS接收到有一个强信号的场景,都可以用该算法确定出MS的位置信息。利用手机软件AndroiTS GPS Test观察头顶卫星的可见性和信号稳定性,根据观察结果确定对1号、9号卫星进行模拟。本文算法中,卫星位置是RS求解出来的已知量,仿真中直接给出卫星以RS为原点的ENU坐标系中的位置。在MATLAB R2016a中模拟GPS L1频段的卫星信号,并建立如图4所示的数学模型验证算法的可行性。卫星1的位置为[500,73,20 000] km,卫星9的位置为[-1 000,473,20 000] km。在MATLAB R2016a中模拟MS收到的卫星1和卫星9的1 ms数据,等效噪声带宽为1 kHz,对应的噪声基地为-144 dBm。

图4 仿真数学模型
根据城市峡谷环境对卫星信号的衰减程度,确定1号卫星信号强度为-130 dBm,对应的信噪比为14 dB;9号卫星信号强度为-150 dBm,对应的信噪比为-6 dB。对于实际接收到的卫星信号,城市建筑物的结构不得不考虑多径信号的影响,处理时需要消除多径干扰。在实际场景中还需考虑MS的时钟偏差,可以利用时间驯服的思想得到,辅助接收机RS的时间是精准同步的。RS间隔固定时长发送时间给MS,把MS时间驯服到与GPS时间同步。
3.1 定位复杂度分析
不同精度的搜索范围和步长如表1所示。

表1 不同精度搜索范围设置
在3 000 m范围内,以100 m为搜索步长。当确定出MS可能存在的范围时,缩小搜索区域并以10 m为步长做中精度的搜索,将MS可能存在的位置确定到更小的范围。再对该范围以2 m为步长做细精度的搜索得到MS的估计位置。相比于直接使用最小步长搜索,减小了计算量。不同方法计算量的对比如表2所示。

表2 不同方法计算量对比
本文算法相比传统捕获算法复杂度降低了91.79%。
3.2 精度分析
1号卫星在空间区域的相关结果如图5所示。9号卫星在空间区域的相关结果如图6所示。卫星1、卫星9的集体检测结果如图7所示,可以看出图中有一个明显的尖峰,峰值对应的空间区域即为待定位接收机所在区域。

图5 卫星1相关结果

图6 卫星9的相关结果
按照表1中不同精度做集体检测,结果如图8所示。图8有两部分明显的阴影区域是因为实验过程中使用了两颗卫星,两条阴影区域交叉的部分为估计出MS可能存在的位置。MS真实位置为[1 760,1 220],定位结果如图8(c)所示,E方向的位置在1 760~1 762 m范围内,N方向的位置在1 216~1 220 m范围内。对100组1 ms卫星数据进行实验得到E、N方向的定位误差如表3所示。

图8 不同精度的定位结果
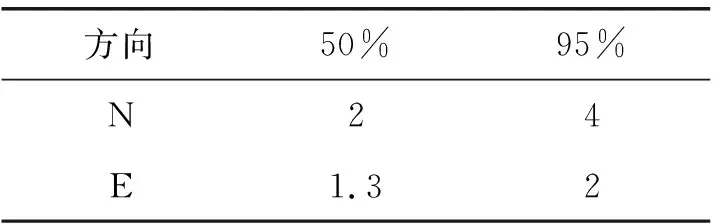
表3 算法定位误差 m
误差的来源主要有以下两方面:
(1) 伪距改变量Δρ的计算引入17.18~0.70 m的误差。
(2) 搜索过程中以一定长度为步长,两颗卫星的交叉部分为一个区域而不是一个准确的点。
4 结 语
针对城市峡谷环境中卫星信号衰减了10~25 dB,普通接收机无法实现定位的问题,提出一种基于协同定位技术的集体检测的算法,把卫星信号的相关结果对应到空间区域中。只需要通过相关结果确定出卫星位置,避免了跟踪和解算的过程。算法将计算复杂性降低了至少90%,定位误差从几十米甚至几百米[19]缩减到了4 m以内,有效地实现了用户在城市峡谷环境中的定位。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
成都信息工程大学学报(2021年5期)2021-12-30
导航定位学报(2021年5期)2021-10-13
西安邮电大学学报(2021年1期)2021-04-19
矿山测量(2020年6期)2021-01-07
无线互联科技(2020年12期)2020-09-03
中国电气工程学报(2019年18期)2019-10-21
无线电通信技术(2019年4期)2019-06-25
