DC-DC变换器控制技术研究与实现
2020-09-10 03:21刘亚强王祖良
宇航计测技术 2020年4期
张 婷 刘亚强 王祖良
(1.西京学院信息工程学院,西安 710123; 2.北京安达维尔科技股份有限公司,北京 101300)
1 引 言
DC-DC变换器存在输出电流和输入电压扰动的问题,其动态性能除了和本身的拓扑结构及系统参数有关外,控制策略具有非常重要的作用,合适的控制方法可提高变换器的响应速度,从而快速调节输出电压[1~3]。
传统的滞环电流控制具有实时控制、响应速度快、鲁棒性强的特点,但该方法在变换器负载电流突变或输入电压有扰动时,其控制效果不够理想。因此,为了提高变换器的输入电压调整率和负载调整率,根据变换器的工作原理,设计一种智能判断与控制方法。以Buck-Boost型DC-DC变换器为例建立数学模型,模拟其工作过程并完成试验测试,所提出的方法同样适应于其他Boost、Buck DC-DC等变换器。
2 DC-DC变换器工作原理
以Buck-Boost型DC-DC变换器为例,详细地分析其在稳定状态和输入电压或负载电流有变化时的工作过程。Buck-Boost型DC-DC变换器的拓扑结构为非隔离型,即可升压又可降压,电路如图1所示[4~5]。

图1 Buck-Boost变换器电路图Fig.1 Circuit diagram of Buck-Boost converter
Buck-Boost型DC-DC变换器工作在稳定状态时,电路处于连续导电模式(CCM),采用传统的滞环电流控制策略。根据采集到的输出电流Io(t)、输出电压Uo(t)、输入电压Ui(t),额定输出电压Ue和平均输出电流o(t),计算出实时平均电感电流L(t)为
(1)
式中:d(t)——占空比。
输出电压Uo(t)为
(2)
将Uo(t)代入公式(1),可得
(3)
Buck-Boost变换器工作在输入电压或负载电流变化时,传统的滞环电流控制策略不再适用,应调整控制策略,即开关导通与关断时间。以负载电流突降为例,对应的IL(t)、Io(t)和Uo(t)波形如图2所示。图中,L1和o1是负载为RL1时的平均电感电流和平均输出电流,L2和o2是负载为RL2时的平均电感电流和平均输出电流,且满足L2>L1+ΔI,H为过程参数,Ton为开关S导通时间,Toff为开关S关断时间。
负载电流突降时,S关断,储存在电感中的能量同时给电容和负载供能,IL(t)减小。t1时刻,电感电流最小为IL1,min,输出电压最大。电容C充电电荷量为Q1,即图中S1的面积。此时,S导通,电容C给负载供能,电容放电电荷量为Q2,即图中S2的面积。t2时刻,满足电容电荷平衡原理Q1=Q2,即S1=S2,计算出参数H、Ton和Toff。因此,可实现精确控制开关导通与关断时间点。

图2 负载电流突降变换器工作波形Fig.2 Working waveforms of load current drop
3 Buck-Boost型DC-DC变换器模型
在Matlab/Simulink环境下,建立了Buck-Boost型DC-DC变换器模型,对应的参数值如下。输入电压:(24±6)V,负载范围:(48~240)Ω,ΔI=100mA,电感L=2mH,电容C=330μF,电路模型如图3所示,对应的控制器模型如图4所示。

图3 Buck-Boost变换器模型Fig.3 Model of Buck-Boost converter

图4 控制器模型Fig.4 Controller model
图3电路模型由两部分组成。模块①为Buck-Boost变换器电路,参数和图2中参数含义一致。模块②为变换器的控制器。负载电流突变时,采用单刀双制开关切换。通过增益为-1的模块Gain实现对Buck-Boost变换器输出电压和输出电流的反相,使得仿真值为正[9]。
图4中,节点1为负载电流突增时最大电感电流即IL2,max,节点2为平均电感电流L(t),节点3为实时电感电流值IL(t),节点4为负载电流突降时最小电感电流值IL1,min。Unit Delay为延迟模块,用于保持上一时刻平均电感电流值,通过对上一时刻和此刻平均电感电流的比较来判断输出电流是否发生突变。图中①是负载电流突降时的控制策略,②是负载电流突增时的控制策略,SR Flip-Flop3产生开关管S的驱动波形。负载电流突降和输入电压突增过程,图中各SR Flip-Flop的状态分析如表1所示。

表1 SR Flip-Flop状态表Tab.1 Status table of SR Flip-Flop SRS Flip-Flop1Flip-Flop2Flip-Flop3S R QS R QS R Q断开0 1 00 0 10 1 0保持0 0 00 0 10 1 00 0 00 0 00 0 0导通0 0 10 0 00 0 1
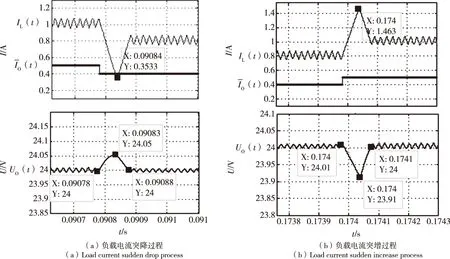
保持阶段,SR Flip-Flop2工作状态有两种,当电感电流满足L1+ΔI 负载电流突增和输入电压突降过程,图中各SR Flip-Flop状态分析如表2所示。 表2 SR Flip-Flop状态表Tab.2 Status table of SR Flip-Flop SRS Flip-Flop1Flip-Flop2Flip-Flop3S R QS R QS R Q导通1 0 10 1 01 0 1保持1 0 10 0 01 0 11 0 00 0 00 0 1断开0 0 01 0 10 1 0 可以看出,通过比较、判断,最终SR Flip-Flop3输出0或1电平,从而可精确的控制开关动作。 Buck-Boost型DC-DC变换器工作时,实时采集Uo(t)、Ui(t)、Io(t)和IL(t),进行A/D转换、计算和比较。初始阶段,采用占空比为50%,频率为50kHz的PWM波控制开关管S动作。当检测到Uo(t)接近Ue时,采用自动判断与切换控制策略,处理器根据变换器的工作状态,控制I/O口的0、1信号时间,使开关管S精准的开通与关断,对应的流程图如图5所示。 图5 主程序流程图Fig.5 Program flow chart 图5中,参数j是变换器稳态过程需执行的次数,10是采用插值方法进行曲线拟合,经过多次试验确定的数值。是变换器前一时刻的平均输出电流值。助启动阶段,延迟函数产生50kHz的PWM波输入开关管S,电路处于稳态过程。当j≥10时,对比前一时刻和此刻的Io来确定电路的状态,即稳态还是暂态,如果是暂态,判断负载电流是突增还是突降,并自动切换至相应的控制策略,循环此过程。 在Matlab/Simulink中,模拟了其工作过程,制作了一台Buck-Boost型DC-DC变换器,和仿真参数保持一致。 变换器负载电流突变和输入电压扰动情况下,分别获得试验波形如图6和图7所示。 图6 负载突变响应波形Fig.6 Response waveforms of load sudden change 变换器取额定负载48Ω时,调节输入电压,得到测试结果如表3所示。 计算Buck-Boost变换器输入电压调整率Su为 (4) 式中:U1——输入电压为上、下限时对应的输出电压中相对U0变化较大的值;U0——额定输入电压24V时对应的输出电压[10,11]。 图7 输入电压扰动响应波形Fig.7 Response waveforms of input voltage disturbance 表3 输入电压变化试验记录Tab.3 Test result of input voltage change(V)Ui(t)182024262830Uo(t)23.9623.9723.9923.9824.0124.02 因此,本设计能够实现宽电压输入,并且输入电压调整率较好。 变换器取额定输入电压24V时,调节负载电阻,得到测试结果如表4。 表4 负载突变试验记录Tab.4 Test result of load mutationUi(t)(V)负载电流(A)输出电压(V)240.124.010.2523.990.523.99 当负载电流从满载的20%即100mA突变到满载500mA时,得到Buck-Boost变换器负载调整率Sr为 (4) 试验证明,变换器具有较高的输入电压调整率和负载调整率。 基于并行运算和组合逻辑,设计了一种智能判断和切换的DC-DC变换器控制方法,在Simulink中对Buck-Boost型DC-DC变换器进行了建模,完成了仿真和试验验证。结果表明,该方法能够克服输出负载电流突变和输入电压扰动对变换器性能的影响,具有输入电压调整率和负载调整率高的优点。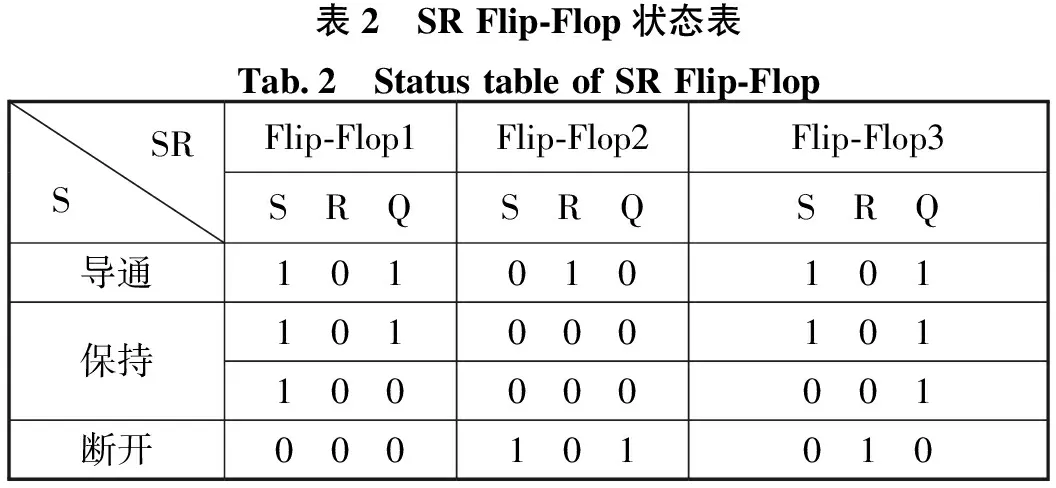
4 系统流程图

5 试验结果
5.1 仿真结果
5.2 测试结果验证




6 结束语
猜你喜欢
电子科技(2022年10期)2022-10-15
汽车零部件(2022年7期)2022-08-03
电子技术与软件工程(2022年6期)2022-07-07
雷达学报(2022年2期)2022-04-30
雷达学报(2022年2期)2022-04-30
电源学报(2022年1期)2022-02-25
科学与财富(2020年24期)2020-10-27
速读·下旬(2019年3期)2019-04-11
科学与财富(2017年27期)2017-10-17
科学与财富(2017年9期)2017-06-09