多功能室内清洁机器人
2020-09-10 19:55吕江浩 陈荣
看世界·学术下半月 2020年10期
吕江浩 陈荣
摘要:随着经济社会的发展, 人们的生活愈加丰富多彩,需要更多的时间参与各项社会活动 ;而老龄化结构的加速,又使得人们不得不投入大量时间在冗余的家务活动,看护活动中. 特别是,2019年开始爆发的全球新冠肺炎疫情, 使得医务人员需要不眠不休地持久作战, 也引发了包括清洁行业的各行各业的劳动力资源严重紧缺. 因此, 加速推进智能化产品的开发研究进程, 具有重大的积极意义;而室内清洁机器人作为智能家居的子类, 能为人类切实分担具体的清洁工作,将人们从繁琐的耗时的家务劳动,清洁活动中解放出来, 具备现实意义。
关键词:多功能;清洁机器人
一、绪论
机器人是集电子技术,自动化控制,机械制造等学科为一体的复杂学科,作为二十世纪最伟大的发明之一,在近几十年发生了突飞猛进的变化, 伴随人工智能的第三次大浪潮, 机器人技术愈发炙手可热,并且进入了社会各个重要领域,其中包括医疗领域的手术机器人, 军事领域的排爆机器人, 安防领域的巡逻机器人, 服务领域的迎宾机器人, 工业领域的巡检机器人和机械手臂等等.目前对机器人的研究越来越呈现出系统化,专业化,更多的电子学,信息学,生物学的先进技术应用于机器人领域, 机器人进入千家万户指日可待。
本文提出了一款多功能室内清洁机器人,除具备核心的清洁功能外,还具有温度检测,烟雾检测,智能喷水等功能,使得清洁机器人在室内一边开展清扫工作,一边可以监测室内的环境情况,若遇到高温或烟雾等异常情况, 自动喷洒水并发出警报. 如此一来, 该清洁机器人在完成室内清洁的同时, 还可以承担环境监测的任务。
二、清洁机器人的工作原理和特点
清洁机器人机身多以圆盘型为主, 主要以微控制器为控制核心, 具备行走机构, 清扫机构. 采用电机驱动轮子,实现灵活地行走;利用多传感器感知环境,通过碰撞传感器等实现清扫过程的障碍物感知, 从而躲避障碍物;通过边刷,滚刷的旋转,吸尘口的配合工作, 实现清扫吸尘一体的双重作用。
其清扫路径,主要包括”Z”字形路径,随机路路径,”回”字型清扫路径,自主规划路径等.前三种清扫路径设计简单, 要么沿着墙边清扫, 要么随机清扫, 同时可利用红外或者超声波避障传感器检测环境中障碍物, 如若遇到障碍物时机器人以一定的规则或随机换向, 该三种清扫路径的优势是设计上易于实现, 成本偏低, 而劣势是智能化程度偏低, 容易出现重复清扫或某些区域未清扫的情况;而第四种路清洁路径--自主规划路, 机器人可先對环境进行地图构建, 掌握环境情况, 自主计算出一条高覆盖率的清洁路径, 该方式的优势是智能化程度较高, 人工干预小, 劣势是对控制器, 传感器, 和算法有较高要求, 因而成本也偏高。
三、底板结构
机械结构是清洁机器人的重要组成部分, 本文设计的清洁机器人的底板结构如下图, 整体为2个驱动轮配合一个万向轮的可移动装置,采用了双电机驱动左右两轮的运动驱动方式,并通过左右两轮的差速实现机器人的转向;主要的清洁模块为:吸尘口,旋转边刷,滚刷,吸风口;底板主要的传感器为:红外感应探头,主要用于障碍物检测.其在室内可以反复行走时,配合清扫路线,辅以边刷,中央主刷旋转,左边清扫刷顺时针转动,右边清扫刷逆时针转动, 可将灰尘较为集中地卷入到吸尘口, 从而可基本实现室内的清扫工作。
四、功能结构
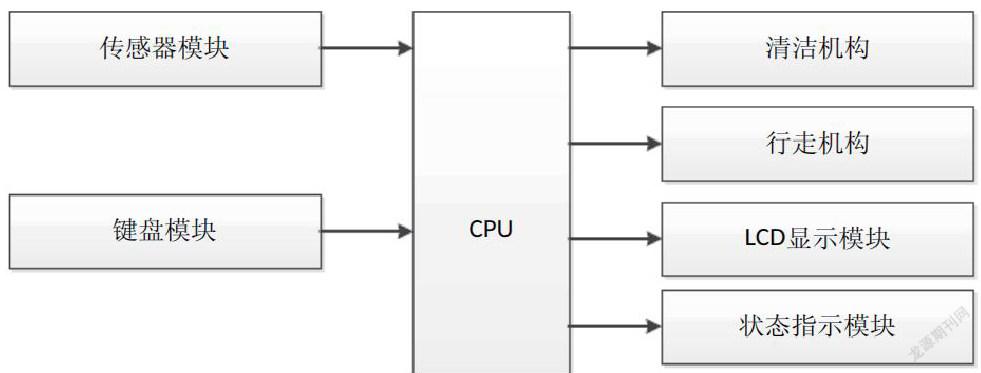
本文设计的清洁机器人,总体结构图为:
核心控制单元,主要通过控制直流电机, 驱动控制清洁机器人的清洁结构(包括边刷,滚刷等)和行走机构(包括驱动轮和万向轮);LCD显示模块主要展示机器人对环境的检测数值,包括时实的温度,烟雾浓度等;状态指示模块主要是LED灯和蜂鸣器,用于展示电源接通状态, 异常状态等情况;传感器模块主要包括红外传感器, 超声波传感器等,用于清洁机器人在清扫时检测障碍物。
五、多功能模块
其多功能模块,主要是基于单片机和多传感器实现的proteus绘制的主要原理如下:
核心处理器采用了AT89C51,一款高性能、低电压8位微处理器;采用的是DS18B20温度传感器, 连接到单片机的P3.4引脚, 其是一款常用的体积小数字温度传感器,且具备硬件开销低,精度高的特点, 抗干扰能力也较强; 烟雾传感器采用的是CQQ0型烟雾报警器,连接到单片机的P1口;LCD显示采用液晶模块 LM016L,连接到单片机的P0口.而喷水装置通过继电器来控制。
主要功能为,AT89C51上电后,开始循环检测环境温度和环境烟雾浓度, 并将温度和烟雾浓度的结果显示到液晶屏上,方便用户查看. 若温度/烟雾浓度超过一定阈值,则推测环境发生异常,此时启动喷水装置对环境进行降温,同时利用蜂鸣器发出警报。
AT89C51 具备:256字节片内数据存储器, 4k 字节Flash 闪速存储器, 两个16位定时/计数器,32 个I/O 口线,一个5向量两级中断结构,一个全双工串行通信口,片内振荡器及时钟电路。同时,AT89C51可降至0Hz的静态逻辑操作,并支持两种软件可选的节电工作模式。
六、工作流程
(1) 按下清洁机器人电源开关, 启动清扫工作;
(2) 多功能清洁机器人清扫装置, 行动装置启动, 开始在地面上行走, 并且毛刷和吸尘口开始清扫吸收垃圾;
(3) 传感器模块开始不断检测外界信息, 若需到障碍物, 机器人转向避开障碍物;
(4) 温度传感器和烟雾传感器的信息, 实时显示到液晶屏上;
(5) 若温度传感器或烟雾传感器信息超过一定阈值,则启动喷水装置和蜂鸣器报警;
(6) 完成清洁工作后, 关闭电源开关;
七、结语
本文提出的多功能室内清洁机器人, 便携轻巧, 使用方便, 不仅具备扫吸一体的清洁功能, 而且在清扫过程中可以实时监测室内环境情况(包括温度,烟雾浓度等), 若发现异常情况, 则主动启动喷水装置或发出警报蜂鸣, 可守护室内每个角落的清洁和安全。
参考文献:
[1]“智能家居”项目化学习的理论与实践[J]. 姜琦琦,胡爽. 辽宁教育. 2019(24)
[2]基于STM32的扫地机器人控制系统设计[D]. 汪腾.南昌大学 2019
[3]移动机器人的定位与地图构建研究[D]. 高超.内蒙古科技大学 2014
[4]扫地机器人的发展现状及展望[J]. 赵航,刘玉梅,卜春光,李艳杰,刘博. 信息与电脑(理论版). 2016(12)
[5]以抗疫为契机,加快广州医疗机器人产业发展[J]. 蒋丽. 机器人产业. 2020(05).
作者简介:
吕江浩(1994-),男,汉族,山西省晋中市介休市,大学本科,深圳市香蕉智能科技有限公司,助理工程师,嵌入式智能化研究。
猜你喜欢
小学阅读指南·低年级版(2021年3期)2021-03-19
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
中国经济信息(2019年1期)2019-01-22
好孩子画报(2019年10期)2019-01-10
学苑创造·C版(2018年7期)2018-08-08
三联生活周刊(2017年26期)2017-06-29
创新时代(2016年10期)2017-05-06
科学启蒙(2016年8期)2016-09-27
科学启蒙(2014年12期)2014-12-09