基于无人飞行器的导航干扰源探测与定位系统设计与实现
2020-09-18 07:12窦晓晶刘京吕鑫
全球定位系统 2020年4期
窦晓晶,刘京,吕鑫
(北京卫星导航中心,北京100094)
0 引 言
全球卫星导航系统(GNSS)因具有覆盖范围广、使用成本低的特点而被广泛应用于社会各个领域,目前,全球四大导航系统GPS、北斗卫星导航系统(BDS)、GLONASS、Galileo都已提供免费的导航定位授时服务,其中,GPS卫星轨道高度为20 200 km,GLONASS卫星轨道高度为19 100 km,Galileo卫星轨道高度为23 222 km,我国的BDS采用混合轨道设计,地球同步轨道(GEO)卫星和倾斜地球同步轨道(IGSO)卫星轨道高度为35 786 km,中圆轨道(MEO)卫星轨道高度为21 528 km,中、高轨的卫星星座设计导致卫星落地信号功率极低,GPS的P码信号落地功率最小为-161.5 dBW,C/A码信号落地功率最小为-158.5 dBW[1];BDS卫星信号落地功率最小为-163 dBW[2];GLONASS的L1频点信号落地功率最小为-161 dBW[3];Galileo的E5信号落地功率最小为-155 dBW[4].这种信号强度相当于16 000 km外一个25 W灯泡发出的光,也相当于电视机天线所接收到的信号功率的十亿分之一[5],极易受到自然环境及人为的干扰,功率为1 W的干扰源就有可能使半径20 km范围内的民用接收机全部瘫痪[6].1997年,美军正式提出“导航战”的概念[7],卫星导航系统的干扰与抗干扰跃然纸上,同时,随着地面电磁信号越来越多,针对导航信号的人为与非人为干扰日益增多,导致导航信号使用严重受限.
目前,卫星导航信号抗干扰主要有三种手段:1)卫星信号自身抗干扰,采取的主要措施包括提高卫星信号发射功率,采用新的导航信号[8-9]等;2)接收机抗干扰,采取的主要措施包括采用组合导航技术[10],如GPS与惯性导航系统(INS)的组合,自适应调零天线[11],军码直捕技术等;3)排除干扰源,采取的主要措施是对阻断或干扰卫星导航系统的人为或非人为射频信号进行探测和定位,最终对其进行关停或摧毁.在第三种手段中使用较多的是地面干扰源测向系统和手持式干扰源查找设备,地面干扰源测向系统存在定位精度低、机动性弱、定位时间长、干扰定位对测向环境依赖性高等问题,而手持式干扰源查找设备,查找过程受地面环境影响较大.为解决上述问题,探索干扰源定位新方式的可行性,本文提出了一种基于无人飞行器的导航干扰源探测与定位系统设计与实现方法,该系统利用无人飞行器搭载监测测向载荷,在空中进行干扰信号监测和干扰源定位,具备作用距离远、覆盖区域大和机动性强等优点,可以有效克服地面干扰测向天线受高建筑群遮挡、移动车行进受复杂地形及道路实际通行规定等影响限制.
1 基本原理
1.1 干扰定位原理
干扰定位采用基于方向的测向定位技术,由方向性天线或阵列天线对干扰源进行测量信号到达角度(来波方向),利用干扰源在某一时刻的坐标与测向站(机)的相对位置关系,建立测量来波角度的数学公式.一般而言,测向定位法往往需要以几个配置在不同位置的测向站(机)组网对干扰源进行测向,然后再用各测向站(机)量测的方向角进行交会计算.

图1 基于测向结果交叉定位干扰源示意图
交叉定位法采用图解定位技术,是测向定位最基本的方法,又称为三角定位法,如图1所示.它利用已知基线上配置的两个(或两个以上)测向站,对干扰源测向后得到带有方位角的方向线,两条或多条方向线的交会点便是干扰源所处的地理位置,理论上,利用两个测向站即可确定干扰源的位置,但是为了增加其准确度,通常使用两个以上的测向站来定位干扰源的位置.对于固定干扰源目标,也可利用移动的单一测向站在不同位置测得的来波信号方位角,运用交叉定位法计算出干扰源位置;对于移动干扰源目标,使用移动的单一测向站第二次测向的时候,目标位置可能已不在第一次测向的方位线上,无法对其准确定位,需要用两个(或两个以上)测向站同时进行测向并连续定位.
1.2 基于无人飞行器的导航干扰源探测与定位系统原理
基于无人飞行器的导航干扰源探测与定位系统通过在无人飞行器上搭载监测测向载荷,使干扰源探测克服复杂地理环境的限制,获取准确的监测数据,实现干扰源的探测与定位.
无人飞行器在地面受扰区域起飞,根据周边环境,设置无人飞行器发射至一定高度,利用搭载的干扰源监测测向载荷终端测向天线阵接收无线电信号,对干扰信号进行监测,接收到的信号依次通过射频模块、中频模块完成工作参数解析、变频、A/D转换、将监测数据实时传输至地面控制站,同时对监测到的干扰信号进行测量,判断干扰来向,并将结果传输至地面控制站进行显示,该测向结果可与地面便携站、机动站、固定站测向结果相互验证.可以采用多点交会定位确定干扰源位置范围,并在地图上进行显示.无人飞行器根据干扰源的初步定位结果,可以手动控制方式向干扰源进行逼近,也可以采用程序引导方式,自动给无人飞行器设定跟踪路线进行逼近.无人机平台上搭载摄像器材,在逼近过程中可以将图像信息传回地面控制站,便于快速判定干扰来源,示意图如图2所示.

图2 示意图
2 系统设计
2.1 系统组成及指标设计
基于无人飞行器的导航干扰源探测与定位系统由无人飞行器、空中监测测向载荷和地面控制站三部分组成.其中,具有载重能力的无人飞行器作为监测平台,搭载空中监测测向载荷,主要用于空中机动及载荷供电;空中监测测向载荷主要由天线、变频器、数据处理机、云台和相机等组成,是干扰源探测和定位的主体设备,主要用于干扰源的追踪、拍照和空间数传;地面控制站由数传设备、图传设备、飞控设备、监控终端及相应的软件组成,主要用于飞行器控制、频谱分析等.系统组成如图3所示.

图3 系统组成框图
根据导航干扰源的特点,设计指标如下:
1)频率监测范围:1~3 GHz;
2)干扰信号识别类型:宽带、窄带、脉冲信号;
3)调制信号识别: AM、FM、ISB、USB、LSB、CW、ASK、FSK、QAM、BPSK、QPSK;
4)实时监测带宽:40 MHz;
5)监测灵敏度:≤-110 dBm/4 kHz;
6)测向体制:相关干涉仪;
7)无人飞行器负载能力:≥7 kg;
8)滞空工作时间:≥20 min(满载情况下);
9)升空工作模式:悬停;
10)升空高度:500 m.
2.2 无人飞行器
无人飞行器作为监测平台,搭载空中监测测向载荷、云台和天线等设备,主要用于空中机动,具有载重能力大、稳定性高的特点.机身和起落架之间预留足够的空间,用来挂载体积较大的吊舱和云台.同时,无人飞行器还可为自身飞行和载荷供电.目前,主流的无人飞行器包括固定翼无人机、小型多旋翼无人机、固定翼与多旋翼混合无人机、系留无人机、飞艇和系留飞艇等,其优缺点比对如表1所示.
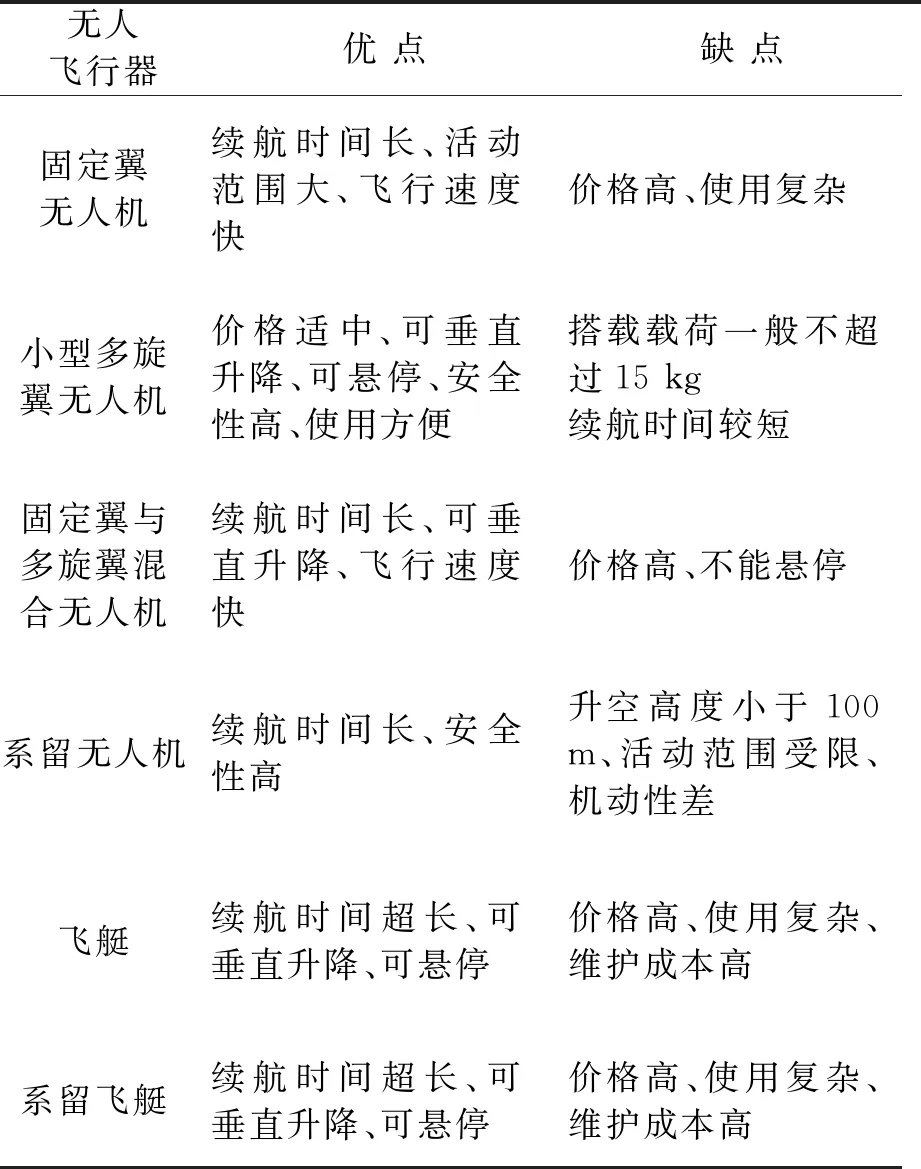
表1 无人飞行器比较
从负载能力、经济性、操作便利性多方面综合考虑可选取小多旋翼无人机,远距离使用,不考虑经济性可选取固定翼无人机.
无人飞行器机体主要由机架、机架附加脚架、电调、电机、螺旋浆等部件,以及机上飞控设备组成,脚架质检单空间可悬挂云台和空中监测测向载荷.无人飞行器具备基本的遥控、跟踪、悬停、自动返航等功能.
2.3 空中监测测向载荷
空中监测测向载荷作为干扰源探测与定位的核心设备,由干扰监测测向设备、图像采集设备、位置获取设备三部分组成,其中,干扰监测测向设备包括侦测天线阵、天线选择器、多通道下变频器、信号处理机和数传设备,主要完成定频、跳频等信号的监测测向及监测数据的实时回传;图像采集设备包括云台及相机、图传设备,主要完成对干扰环境及干扰源的拍照及图像信息的实时回传;位置获取设备包括电子罗盘、GNSS+INS/MEMS设备.空中监测测向载荷组成框图如图4所示.

图4 空中监测测向载荷组成框图
2.3.1 干扰监测测向设备
干扰监测测向设备组成如图5所示.

图5 干扰监测测向设备组成图
天线利用多个测向天线阵元的传感器功能,实现对空间电磁场的感应接收.由1~3 GHz天线阵、射频开关矩阵、结构件等组成.天线阵元接收空间中的电磁信号,经由天线阵控制器中的RF模块处理后,输出可用于无线电测向的RF信号,用于测向定位算法,通过位置获取设备中的电子罗盘提供磁北方向,开关矩阵选择两个天线阵元接到两路输出通道上.测向天线阵原理图如图6所示.
射频模块将来自天线的1~3 GHz射频信号下变频成76.8 MHz中频信号,并送入中频模块,中频模块硬件组成如图7所示.

图7 中频模块硬件组成图
中频处理单元主要由滤波、A/D、DSP电路、FPGA电路和时钟电路等部分组成,主要作用是将中频信号带通采样后,送入FPGA芯片进行数字混频、滤波、抽取,然后将FPGA处理后的数据送入DSP进行处理,DSP主要完成各种控制逻辑以及各种算法.信号首先通过ADC把模拟中频信号转换为数字信号,然后数字信号在FPGA里完成正交下变频和快速傅里叶变换(FFT)等高速数字信号处理,降低处理主频后,在DSP中对各种算法实现信号分析与处理.数据处理流程如图8所示.

图8 中频模块数据处理流程图
具体流程如下:
1)双通道射频模块将两路射频信号下变频到中频信号IF1和IF2;
2)数据采集和数字正交下变频模块将两路中频信号变换为数字基带IQ数据;
3)相位差计算模块通过计算两路IQ数据得到两阵元之间相位差;
4)使用各基线对应的相位差数据与事先存储的样本相位差通过方向粗估计模块进行相似度计算,找出来波信号的入射方位角粗略值;
5)二次插值模块对相关系数进行二次插值,得到较为精确的信号测向结果.
处理过的测向结果通过数传设备实时、稳定、可靠、高速地回传至地面控制站.
2.3.2 图像采集设备
图像采集设备中的云台选取轻型化、小型化,方便无人飞行器搭载;相机可拍摄高清照片和视频,采用防抖设计,保证影像信息的清晰可识别,图传设备中加入影音数据预处理,压缩后实时传输.
2.3.3 位置获取设备
无人飞行器的位置获取采用GNSS+INS/MEMS组合导航的方式,可最大限度地保证定位导航的精度和可靠性,电子罗盘采用三轴捷联磁阻式数字磁罗盘,具有抗摇性和抗震性,能够进行精确的倾斜补偿和磁场干扰补偿,电子罗盘作为姿态传感器用于整体的姿态保持和调整.
2.4 地面控制站
地面控制站主要完成两方面工作:一是完成对无人飞行器的控制、飞行路线的显示;二是完成干扰监测信号的实时接收、处理、显示.地面控制站硬件设备组成主要包括数传设备、图传设备、飞控终端、监控计算机等,软件包括飞控软件和无线电监测管理软件.组成框图如图9所示.

图9 地面控制站组成框图
2.4.1 硬件设备
地面控制站通过数传设备和图传设备与无人飞行器上搭载空中监测测向载荷进行通信,获得信号频谱监测及测向信息,相机拍摄的影音信息,实现监测数据的交互和监测图像的实时传输;通过飞控设备与无人飞行器进行通信,实时获取无人飞行器的飞行状态信息并发送控制指令,支持超视距传输.这里需要注意的是,飞控与数传/图传应选用不用的频率及收发信机实现,以确保无人飞行器在飞行过程中的安全.
2.4.2 软件设备
飞控软件主要用于无人飞行器实时状态信息的综合处理与显示、发送接收控制指令以及人机交互操作.
软件功能单元组成如图10所示,通信控制功能主要实现数据收发,通信协议的实现、数据解析及封包;飞行及载荷控制功能主要是按照规定的通信协议生成相应的飞行控制及载荷控制指令;电子地图功能主要用于在地图上实时显示无人飞行器当前的位置、航向、飞行轨迹、任务航点等信息,以图形化的方式方便地面人员实时对无人飞行器进行监测和操控.状态显示功能主要用于实时显示无人飞行器的最新飞行状态数据,并能够对异常情况进行监控报警.航线规划功能主要用于对无人飞行器任务航线数据进行统一管理;参数配置功能主要用于对无人飞行器的一些常用参数进行统一配置管理.同时,飞控软件还具有数据存储与回放功能,便于历史数据的提取及分析.地面无人机飞控软件各单元交互关系如图11所示.,

图10 飞控软件功能单元组成图

图11 飞控软件各单元交互关系
无线电监测管理软件具有实现快速的无线电频谱监测及监测数据的统计分析等功能.首先通过地面数传设备接收空中数传设备传回的频谱扫描数据、信号测量和干扰信号的测向结果,然后,对频段扫描、信号分析、测向等数据进行综合显示,对频段扫描数据进行干扰信号的检测和告警,对检测到的干扰信号来源方向进行测量,对单机多点或多机测向的结果进行交汇定位.最后,通过数据库对监测的原始数据、干扰信号信息、定位信息进行存储和管理.信号及数据流向如图12所示.

图12 信号及数据流向
无线电监测管理软件功能主要由无线通信、用户操作管理、数据收发、频谱监测、干扰源信号分析、干扰源测向、干扰源交汇定位、数据存储、侦察威胁评估和数据库管理与维护构件组成,如图13所示.

图13 无线电监测管理软件功能单元组成图
频谱监测对中频数据采集模块回传的数据进行频段扫描和信号分析,通过全频段的粗扫描和对重点频段的细扫描,得到干扰源信号的中心频率.干扰源方位测量根据该中心频率及中频数据采集模块得到的IQ和相位差数据,经过测向算法得到干扰源信号的来源方向.干扰源交汇定位通过干扰源信号的来源方向进行两点交会定位或三点及多点交会定位确定干扰源的位置.
3 工作流程
基于无人飞行器的导航干扰源探测与定位系统工作流程如图14所示.

图14 工作流程图
图14具体流程如下:
1)当某区域受到干扰时,首先将系统展开,标校初始位置、设置初始监测参数等;
2)通过飞控终端控制无人飞行器,使其发射至预定位置并悬停,预定位置一般为起飞地点上方附近;
3)对干扰信号进行监测,将监测数据实时传回地面控制站,并实时测量干扰信号大概方向;
4)根据初步判断的干扰信号来波方向,手动设置无人飞行器按8字路线变换位置,在适当位置再次悬停测量,将监测数据回传地面控制站;
5)地面控制站根据两次测量结果,采用交汇定位,确定干扰源的大概位置,并在地图上进行显示;
6)通过手动控制或自动设置路线,无人飞行器逼近干扰源,逼近过程中实时回传监测数据,直至发现干扰源.在到达干扰附近时对干扰源进行拍照,便于人工最终消除干扰源提供影像支持;
7) 飞行到干扰源上方时报警,任务结束,然后自动或手动返回降落.
4 关键技术
4.1 基于信号频谱的干扰检测技术
基于信号频谱的干扰检测采用能量干扰检测法和基于循环谱法相结合的方法.能量检测法,主要原理是通过接收信号的能量判定干扰信号是否存在.在不知干扰信号相关信息的情况下,基于信号能量的检测法是常用的方法,能够快速地测出干扰.常见的GNSS频段内的干扰信号主要有窄带连续波、连续扫频波、2FSK、BPSK等,这些信号都属于周期性平稳信号,可通过相关运算得到循环谱,再经过一定的处理得到,循环统计量,最后和门限比较即可实现检测的目的.循环谱法检测速率相对较慢,但是能把噪声能量和干扰信号能量区分开来.因此,基于频谱的干扰检测方法可先使用能量法快速地检测出干扰,再利用循环谱法对干扰进行进一步检测.
4.2 相关干涉仪测向技术
干涉仪测向方法是利用天线接收信号的相位信息来获得信号方位,目前在无线电监测领域中得到了广泛的应用.干涉仪方法中的长基线技术可以平滑因信号的衰落和多径造成的波前失真,因而具有良好的抗干扰能力和较高的测向精度.
利用相关法测向原理的相关干涉仪与传统的干涉仪相比,其突出的优点有:
1)对硬件的制作要求降低,相应成本降低,
2)能有效消除载体对天线的影响,
3)能有效消除天线间互耦对测向精度的影响.
4.3 针对干扰源定位的无人飞行器航迹规划技术
通过机载干扰源定位装置在空中巡飞,对地面干扰源进行初步定位,并将干扰源的位置信息发送给地面干扰定位车辆,在接近干扰源的区域进行准确的搜查.针对不同的飞行阶段,采取不同的定位模式和航路规划方案.
4.3.1 飞越目标定位法与航路规划
GNSS干扰监测无人机飞行过程中根据发射信号周围与正上方信号强度的变化来确定目标辐射源的位置.飞越目标定位法主要适用于无人机对近距离GNSS干扰源的快速定位和排查.
对称振子天线是一种使用最为广泛的天线,其立体、垂直面和水平面的方向图如图15所示.垂直面方向图可以看出干扰源向四周辐射,但在天线正上方几乎没有信号向外辐射,根据干扰信号四周和正上方信号接收强度的强烈变化即可确定目标信号源的位置.

图15 对称振子天线的立体方向图(a)和垂直面方向图(b)
根据以上原理,设计了航迹规划方案,如图16所示,详细步骤如下:
1)机载平台在高度H、位置P0处测出无线电信号源所在强度和方向;
2)机载平台沿测向方向继续飞行,在飞行过程中持续监测、测向,且记录飞行航迹;
3)当测出无线电信号源所在方向、强度发生明显变化时,判定干扰源PS位于方向、强度发生变化的位置下方,结合航迹记录即可获得干扰源位置.

图16 飞越目标定位法航迹规划图
4.3.2 机载多点测向交叉定位与航路规划
多点测向交叉定位法是指机载平台在不同地点监测、测向,通过子空间分解超分辨测向算法得到的干扰源角度信息,通过计算两条或多条示向度线的交汇区域来得到干扰源的位置.交叉定位法主要适用于无人机对中距离和近距离GNSS干扰源的快速定位和排查.
假设干扰源位置未知,载体在位置1时测得干扰源与水平方向夹角为θ1,移动一段距离S后到达位置2,再次测得干扰源与水平方向夹角为θ2.载体运行轨迹与水平方向的夹角φ可由惯导系统或者卫星导航系统测量给出,则有
得到干扰源与载体之间的距离,并且角度已知,则可得到干扰源相对于载体的位置.三角定位法对载机的飞行要求为不能沿干扰源方向直线飞行,此时角度信息没有更新,上面所用公式失效,所以无法判断出浮标的位置,故载机的典型飞行航迹为L型轨迹飞行.

图17 定位原理二维示意图
根据以上原理,设计航迹规划方案,示意图如图18所示,流程如图19所示.

(a)θ角很小

(b)θ角适中

(c)θ角较小时航迹优化

(d)θ角较大时航迹优化图18 交叉定位航迹规划示意图

图19 多点测向交叉定位航迹规划流程
5 结束语
本文针对传统导航干扰源定位多采用地面干扰源测向系统或手持式干扰源查找设备的情况,提出了一种基于无人飞行器的导航干扰源探测与定位系统设计方案,该系统具有作用距离远、覆盖区域大和机动性强等优点,可以有效克服地面干扰测向天线受高建筑群遮挡、移动车行进受复杂地形及道路实际通行规定等影响限制,具有广泛的使用空间和现实意义,后续,可通过对干扰信号特征的深入研究,在信号识别准确度和测向时间上提高该系统性能.
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
计算技术与自动化(2022年2期)2022-07-04
凤凰动漫(军事大王)(2022年1期)2022-04-19
全球定位系统(2021年5期)2021-12-14
计算机仿真(2021年2期)2021-11-17
海军航空大学学报(2021年1期)2021-09-01
北京航空航天大学学报(2020年3期)2021-01-14
全球定位系统(2020年1期)2020-03-31
舰船电子工程(2020年1期)2020-03-03
科教导刊·电子版(2016年15期)2016-06-25