
福州地铁六号线首级GNSS控制网布设及数据处理
2020-09-30 02:31梁昭阳
福建建筑 2020年9期
梁昭阳 陈 煌
(1.福建船政交通职业学院 道路工程系 福建福州 350000; 2.福州市勘测院 福建福州 350000)
0 引言
近年来,随着我国城市化进程的加快,城市交通压力越来越大,各地积极启动地铁建设,缓解交通压力。地铁建设显然已成为当下各城市应对交通拥堵的首选方案,地铁在地下建设,空间小,施工难度大,对测量的精度要求高。然而,如何确保地铁首级控制网建设能够高精度高质量的完成,是整个地铁工程建设的关键环节,也是确保后期运营维护的重要保障[1-2]。
福州是福建省省会城市,在当今时代态势下,兴建地铁,缓解路面拥堵,是时代发展形势所然。为福州城市轨道后续首级控制建设提供参考,本文以福州市地铁六号线首级GNSS控制网布市及其数据处理为案例,开展精度统计分析和评定。
1 福州地铁六号线首级GNSS控制网布设
福州市轨道交通6号线是福州市城市快速轨道交通网的重要组成部分,线路起于仓山区南台岛会展中心,终于长乐国际机场。主要线路沿会展中心-福泉高速-东部新城-道庆洲大桥-203省道-海峡路-郑和路-东鹤路-道庆路-漳江达道-漳港镇-长乐机场。线路全长约41.111km,其中高架线长6.765km,过渡段长0.643km,地下线长33.703 km,共设19座车站,其中高架站1座,地下站18座,最大站间距为6.815km;最小站间距为0.927km,平均站间距2.140km。全线设横港车辆段和樟岚停车场,控制中心拟设于横港车辆段内,与规划5、7、8、9号线共用;设主变电站2座。纵观整条线路设计里程长,沿线不仅经过繁华主城区,还穿过闽江、乌龙江等地质条件复杂地段,这给测量工作增加了诸多困难。
1.1 现有控制点成果的收集整理
根据福州地铁六号线规划线路实际情况,沿线路附近收集可供利用的平面控制测量成果。
地铁六号线选取项目周边共6个已知高等级GPS点做为起算点,其中为了顾及GNSS网形条件和数据试验的需要,选取2个在项目周边的福州市CORS站作为起算点。
另外,考虑到福州地铁六号线将来会与多条在建或已运营地铁线路进行交叉换乘,地铁控制网的整体性和后续规划的衔接性,除了对福州城市等级控制点收集外,还对其它已建成的既有线路和在建地铁线路进行控制点的收集并利用,以满足控制网布设需求。经收集,并对收集到的控制成果进行逐一现场踏勘验证,确认能够满足地铁首级GNSS控制网的观测要求后,共得到可利用的现有控制成果16个点。主要包括福州市连续运行参考站、福州市城市二等和三等GPS点、地铁1号线一二期地面平面控制点、地铁2号线地面平面控制点等。
1.2 GNSS控制网布设
福州市地铁六号线首级GNSS平面控制网的坐标系统,采用福州市城市地方坐标系统,为保证GNSS控制网具有较高的内符合精度,首级控制网在福州市三维框架网下布设,其中福州市三维框架点6个,4个城市已有控制点、 50个新埋设控制点、其它地铁首级GNSS控制点8个,线路点共计68个点组成。控制网点位分布如图1所示。

图1 福州市地铁6号线GNSS首级控制网图
地铁六号线GNSS首级平面控制网的布设遵循GNSS控制测量的基本特点和要求,具体按照以下几个原则进行布设[3-5]:
(1)卫星定位控制网需与现有城市一等或二等控制点联测3~5个点,并点位均匀分布;在不同线路交叉有联络线处或同一线路前后期工程衔接处,布设2个以上重合点,重合点坐标较差应满足要求。
(2)卫星定位控制网沿线路两侧布设,控制点布设在隧道出入口、竖井或车站附近,车辆段附近应布设3~5个控制点,相邻控制点应满足通视要求,布设控制点选择便于发展精密导线。
(3)卫星定位控制网非同步独立观测时,由非同步独立基线构成闭合环或附合路线,每个闭合环或附合路线中的边数不应大于6条。
(4)为了确保轨道交通卫星定位控制网与轨道交通其他在建及将建线路的卫星定位控制网的平面衔接关系,在线路换乘站处充分考虑轨道交通其他线路位置进行布设。
1.3 起算点稳定性分析
该项目选用的起算点位置分布散,且成果时间间隔较长。因此,为了保证6号线首级GNSS控制网在进行全网平差时的基准一致性,确保整体网型不发生扭曲,且利于后续精密导线加密测量工作,在进行GNSS控制网平差之前,对已知平面控制点起算数据的稳定性和兼容性进行分析[6-7]。
起算点稳定和兼容性分析检验采用加点法进行分析。该法是指在平差计算时通过对部分已知数据进行约束,然后将剩下的已知起算点作为待定点纳入控制网平差,再对结果进行比较分析,排除稳定性较差的起算点。本次采用的具体方案是约束5个点,将剩下一个点入网参与平差。具体做法:首先在二维约束平差前,对分布于网周边的6个起算点稳定性采用加点法进行分析,分别以其中五点作为约束点,解算另外一点坐标,通过比较解算较差是否达到限差要求判定起算点稳定性,经过比较得出各点较差。具体结果如表1所示。

表1 起算点兼容性检查表 mm
由表1分析可知,各点检核较差均满足规范规定的限差要求,可靠性较强, 已知点点位总体稳定性较好,6个起算点均可作为本次GNSS首级控制网测量平差的起算点。
2 GNSS控制网施测
地铁首级GNSS控制网是地铁工程的首级框架性控制网,其成果精度的可靠性关系到后续工程的各个环节,是控制测量的关键性工作。因此,为提升GNSS整网精度可靠性,保证测量成果的精度,本次首级控制网观测方案全部采用可靠性较强的边连式组网观测,要求重复设站率≥3.0,以保证有效多余观测和外业观测数据可靠性。同时,在仪器选择上采用了性能稳定的天宝trimble R4 GNSS接收机,其仪器标称水平精度为:3mm+0.5ppm,垂直精度为:5mm+0.5ppm,能够满足观测要求。此外,还对本次所使用的测量设备可靠性再次进行全面检查,主要检查内容包括:仪器设备完整性、GNSS接收机模式设置、接收机存储卡、电池容量、对中基座和脚架等.并对所有设备进行一次数据采集和传输验证。
外业观测前,对测区进行GPS卫星星历预报,根据预报图选择合理观测时间窗口,制定观测计划。根据控制网点位分布及星历预报情况,观测时实际采用8台天宝R4双频测量型GNSS接收机,同时利用2个连续运行参考站数据,以边连接方式进行多时段观测卫星定位控制网,观测时间长均大于2h;采样率为10s;高度角为15°;实际重复设站率3.3;实际观测了25个时段。每时段天线高量取分别以接收机3个方向的平均值为准,且观测前、后各量取天线高各一次。
3 数据处理
3.1 数据预处理
控制网进行平差计算前,对所有外业采集数据的有效性进行检查,确保数据能够满足要求,利用TEQC软件对所有外业观测数据进行质量检查。TEQC软件是一款功能强大且使用方便的GNSS数据预处理软件,使用时通过输入相应的执行命令就可对多路径效应和周跳比、电离层延迟、信噪比等信息进行检查,得出数据的有效利用率。经检查,所有测站的数据有效利用率均大于80%,满足规范[4]要求。最后,对检查合格后的数据利用TEQC软件进行数据编辑和格式转换,形成标准rinex格式数据。
3.2 基线解算
基线解算采用Trimble自带的GNSS精密静态数据处理商业软件TBC(Trimble business center)V 2.5软件版本,本次基线解算采用卫星广播星历,双差相位观测值和双差固定解方案。基线解算前用软件检查每一个时段数据质量,对外业采集过程中信号干扰周跳较大部分基线,采用删除卫星或用截取时间段的处理方法进行修复,并分段进行基线解算。经统计整网共观测25个时段,共171条独立基线解算通过。对解算通过的所有独立基线进行重复基线、环闭合差的检验。
(1)重复基线长度较差ds应满足下式的要求[8]:
式中,
n为同一边的复测次数;
σ为测量中误差,单位mm。
(2)独立基线异步环坐标分量及全长闭合差应满足下列各式要求[8]:
式中,
n为独立环的边数;

Wx为坐标分量X闭合差,单位mm;
Wy为坐标分量Y闭合差,单位mm;
Wz为坐标分量Z闭合差,单位mm;
W为全长闭合差,单位mm。
解算结果:重复基线较差最大值为1.69cm,小于限差±6.57cm;环闭合坐标分量差最大值分别为Wx=-4.53cm,Wy=6.33cm,Wz=5.51cm,均小于相应限差。环闭合差W最大值为8.94cm,小于限差±13.80cm。基线解算检查结果表明,基线质量均满足规范要求,可进行平差计算。
3.3 控制网平差
为确保最终平差结果的精确性和有效性,本次控制网平差采用武汉大学的科傻GPS数据处理软件Cosa GPS Ver 5.21。
3.3.1三维无约束网平差
基线检验通过后进行三维无约束平差,以网中的一个点的WGS-84坐标系的三维坐标作为位置基准,将全部独立基线构成闭合图形,以三维基线向量及其相应方差协方差阵作为观测信息。
该项目平差时,以CHAN点在WGS-84坐标系下的三维坐标为起算数据,在WGS-84坐标系中进行三维无约束平差,并提供WGS-84坐标系的三维坐标、坐标差观测值的总改正数、基线边长及点位的精度信息,基线向量改正数的绝对值应满足下列要求[8]。
VΔX≤3σ,VΔY≤3σ,VΔZ≤3σ
(3)
式中,
VΔX为基线分量X改正数,单位mm;
σ标准差,单位mm;
VΔY为基线分量Y改正数,单位mm;
VΔZ为基线分量Z改正数,单位mm。
3.3.2约束网平差
二维约束平差计算前,首先采用加点法对已知点起算数据可靠性进行检验,从中筛选出系统一致的点组作为GNSS首级控制网的起算基准。考虑到起算点均匀分布网周边及今后其他轨道线路平面控制测量的衔接,在福州城市地方平面直角坐标系中,以YT、HT、A042、NSD、CHAN、RUAN共6点为起算数据全部参与约束。进行二维约束平差,采用“科傻GPS数据处理软件Cosa GPS Ver 5.21”计算卫星定位首级控制网点的福州城市地方平面直角坐标,并输出相应坐标系的坐标、基线向量改正数、基线边长和方位角、转换参数及精度信息等[8]。
4 精度分析
经过方案优化后,选取25个观测时段解算通过的171条合格独立基线进行构网平差。将解算通过的独立基线进行重复基线、环闭合差的检验,结果显示:其中重复基线最大值为1.69cm,小于限差6.57cm。表2为异步环闭合差统计结果,环闭合差最大值为8.94cm远小于限差,各个坐标分量闭合差也小于限差值。

表2 异步环闭合差统计 cm
重复基线和闭合环检验是判断卫星控制网质量的重要指标,网型合格后进行三维无约束平差。三维无约束平差后的最弱点位中误差为3.93cm。本次三维无约束平差的所有点位精度统计结果如图2所示。
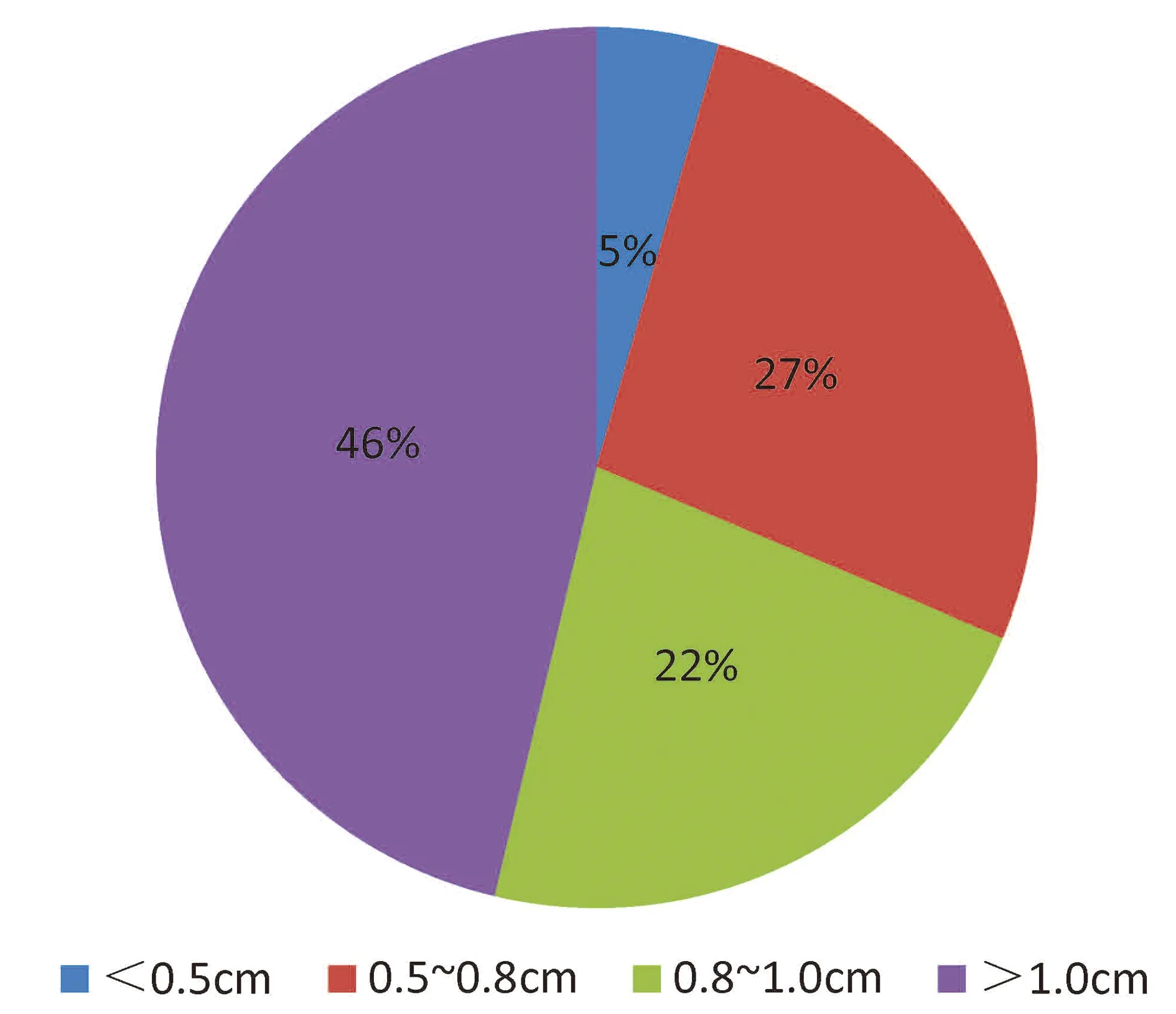
图2 三维无约束平差点位精度统计
依据三维无约束平差结果,在判定6个起算点稳定性良好后(具体结果见表1),再进行二维约束平差计算。二维约束平差后的最弱点位中误差为8.4mm,最弱边相对中误差为1/232 000, 二维约束平差后的所有点位精度统计结果如图3所示。

图3 二维约束平差点位精度统计
通过以上数据分析可得,整网共68个点,平差后所有点位中误差均小于10 mm,满足设计限差≤±12mm的精度要求,最弱边相对中误差也满足设计精度要求。
5 结语
福州地铁六号线作为福州市城市轨道交通网络的重要一环,GNSS首级平面控制网的建成不仅能够为六号线建设提供高精度平面基准,也将为六号线后期的运营维护及后续其他线路规划建设提供控制依据。本文通过对福州地铁六号线首级GNSS平面控制网的布设方案、数据采集与处理过程进行介绍,并对其解算结果进行精度分析,进一步验证了数据计算结果的可靠性,获得了高质量首级平面控制点坐标,为福州地铁六号线的施工放样、贯通测量、联系测量、竣工测量等测量工作提供数据保障、框架服务;同时,也为福州城市轨道交通后续高精度框架网的建设提供了重要经验参考。
猜你喜欢
——福州市冯宅中心小学简介(二)
福建基础教育研究(2020年9期)2020-10-21
——福州市冯宅中心小学简介(一)
福建基础教育研究(2020年9期)2020-10-21
海峡姐妹(2020年5期)2020-06-22
红土地(2019年10期)2019-10-30
福建基础教育研究(2019年8期)2019-05-28
福建基础教育研究(2019年5期)2019-05-28
海峡姐妹(2018年11期)2018-12-19
海峡姐妹(2018年1期)2018-04-12
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
