
空间目标航迹片段关联算法研究
2020-10-09 11:13修建娟张敬艳
弹道学报 2020年3期
修建娟,张敬艳,董 凯,2
(1.海军航空大学 信息融合研究所,山东 烟台 264000;2.中国电子科学研究院,北京 100041)
空间目标预警监视系统测量跟踪的目标群具有运动速度快、群内不同目标之间相对运动速度较低等特点,导致雷达在相对较长的时间内不能对目标群中的各个目标进行有效分辨[1-3],而对于部分可分辨的群内目标,又无法获取连续有效的稳定测量,跟踪过程中雷达系统容易出现短小航迹多、有效跟踪目标数量低、跟踪出现饱和等问题[4-6]。如何充分利用空间目标运动特性解决同一目标中断前和中断后航迹关联问题,不仅是改善空间目标跟踪连续性和稳定性的关键所在,也是实现空间多目标高精度实时跟踪必须要解决的难点问题[7-13]。近年来,随着目标性能不断提高,跟踪环境日益复杂,针对同一传感器同一目标前后时刻中断航迹关联问题的研究日益凸显[14-19]。为此,本文针对空间目标运动特点,利用中段动力学模型对中断前的空间目标运动轨迹进行预报外推,通过中断前航迹外推预报结果和中断后新起始的每个航迹段前几个时刻的状态更新值进行关联配对,通过设置关联门限和关联检验统计量,实现空间目标中断前后航迹的关联融合。该方法可通过轨迹预报解决复杂环境下由于空间目标测量数据断续带来的目标时跟时丢,短小航迹多,有效跟踪目标数量低等问题,提高雷达系统目标跟踪精度,改善空间目标跟踪的连续性和稳定性。
1 基于中段动力学模型的航迹外推预报
考虑到中、远程空间目标具有椭圆运动轨迹的特点,此时如果仅利用跟踪滤波方程进行直线外推,航迹中断的时间越长外推误差就越大,导致中断前和中断后航迹关联失败。为此,本文针对空间目标断续航迹关联问题采用的研究思路是,利用目标动力学模型对中断前的空间目标运动轨迹进行预报外推,将中断前的空间目标航迹的外推预报值和中断后空间目标航迹进行时刻对准,并以中断前空间目标外推航迹为中心,通过中断前航迹外推预报结果和中断后新起始的每个航迹段前几个时刻的状态更新值进行关联配对。
1.1 ECI坐标系下基于欧拉方程的外推预报

(1)
(2)

(3)

1.2 ENU坐标系下基于动力学方程约束的外推预报

(4)
式中:
zs,r(k)=zr(k)+re+H
(5)
(6)
式中:H为雷达站的大地高程;
(7)
式中:B为雷达站大地纬度,ω为地球自转角速度。
2 断续航迹关联接批
2.1 断续航迹接批
滤波中常见的Singer算法、EKF、交互多模型等均可较好地实现对目标的跟踪[1,14,19],这些算法中状态方程如果采用匀速(CV)模型或匀加速(CA)模型来建模,其状态一步预测采用的是直线外推的方法,具体为

(8)
由于空间目标在中段惯性飞行阶段可认为只受重力作用且呈椭圆运动轨迹[1-2],该情况下若采用直线外推方法一旦出现一段时间内目标测量数据丢失情况,必然会出现航迹中断,等到重新捕获到该目标就需要再次进行航迹起始,给予新的目标编号,导致出现短小航迹多,多通道跟踪同一个目标等问题。而利用中段动力学模型进行预报外推是在式(8)状态一步预测的基础上,不断利用式(3)或式(4)估计的加速度进行实时修正,以期得到更准确的目标运动轨迹外推预报结果。

(9)
为了更好地对中断前和中断后的目标航迹进行关联配对,需要先进行时刻对准,设时刻对准后的中断前航迹和其后起始的航迹集合表示为
(10)
(11)

若位置检验统计量λ(k)低于设定的检验门限Dt,其中Dt的取值可根据空中目标类型和工程经验确定和调整,即
λ(k)≤Dt
(12)
则判定k时刻中断前和中断后的这2个目标航迹源于同一个目标,可用后续时刻的测量数据对中断前航迹外推预报结果进行更新。在多目标情况下如果出现关联模糊,还可利用速度信息等对关联做进一步判断确认,即选取中断后新起始航迹中速度与中断前航迹速度最接近的作为关联航迹。
2.2 多目标情况下的接批判断
由于2.1节给出的断续航迹接批只判断某个时刻中断前后目标航迹的关联情况,为了保证复杂环境下空间目标关联正确率,在多目标情况下可采用连续多个时刻的数据由滑窗检验的关联质量判定最终的关联对。
定义中断前航迹i和中断后航迹j在l时刻的关联质量mij(l)为
mij(l)=mij(l-1)+Δmij(l)
(13)
式中:
(14)
且如果航迹i,j在l时刻第一次关联,则mij(l-1)=0。
如果连续n个时刻关联判断后,满足mij(l)≥m,且m/n≥0.5,则判断相应的中断前航迹i和中断后航迹j来自同一个空间目标,即利用连续n个时刻的数据进行关联判断,至少要有一半以上的时刻能够关联成功,才能判断相应的中断前航迹i和中断后航迹j为同一个目标的中断航迹,接批成功。其中,m/n的值越接近1,航迹接批的准确率越高,但接批速度越慢;m/n的值小于0.5,则误判概率会较大。m/n可根据环境、目标数量等的复杂程度来取不同的值,例如可取连续8个时刻进行关联判断,如果mij(l)≥5,则中断前航迹i和中断后航迹j接批成功。
若中断后所有航迹均完成和中断前航迹i的关联检验,没有满足关联检验要求的航迹,则关联不成功,滑窗右移继续进行判断。
3 仿真分析
仿真中参数设置如表1所示。
ECI坐标系下空间目标三维真实轨迹、欧拉外推轨迹、滤波直线外推轨迹和动力学方程约束的外推轨迹如图1所示。图2为与图1相对应的x-z轴结果图,图3和图4为ENU坐标系下的结果图,图5为图4的局部放大结果。另外,这里图1、图2需将ENU坐标系下的滤波直线外推轨迹和动力学方程约束的外推结果转换到ECI坐标系下,而图3和图4需将欧拉外推结果转换到ENU坐标系下。
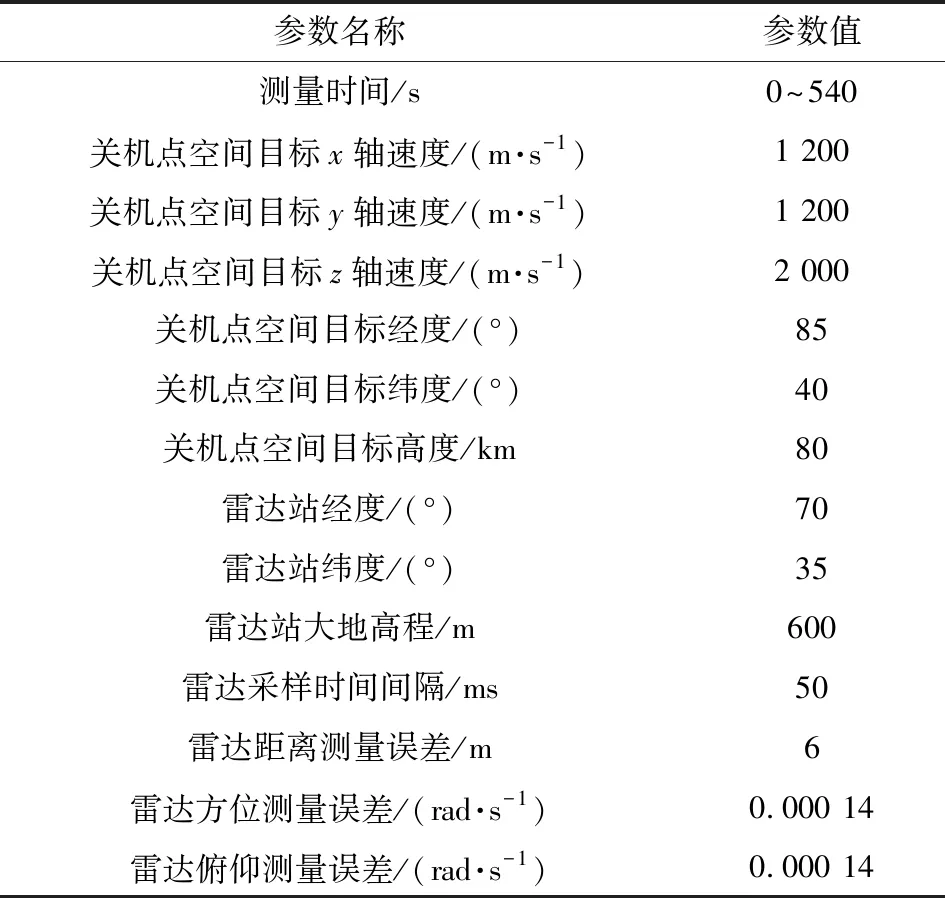
表1 仿真参数设置
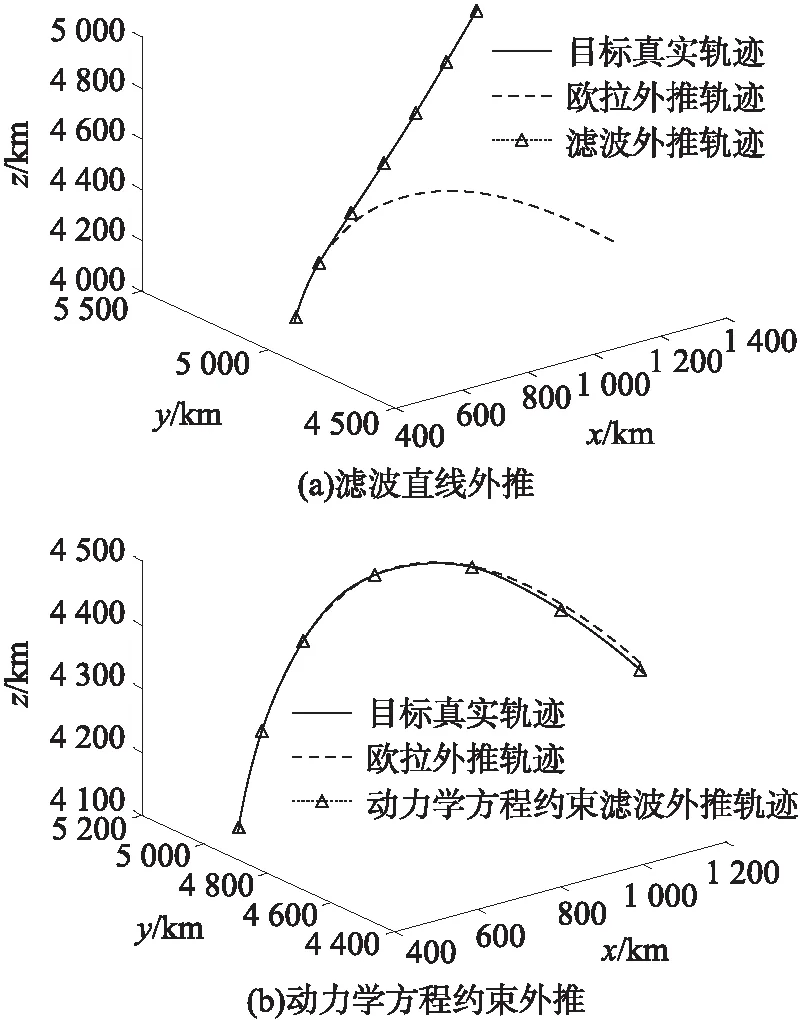
图1 ECI坐标系下空间目标三维轨迹
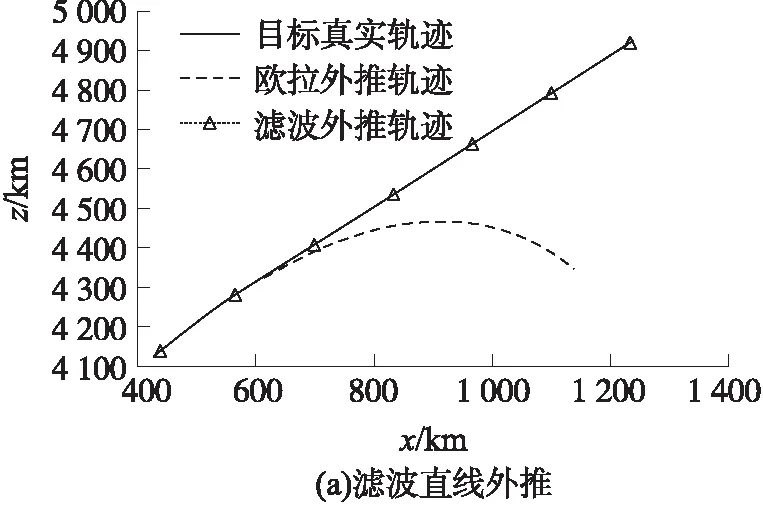
图2 ECI坐标系下空间目标x-z轴轨迹
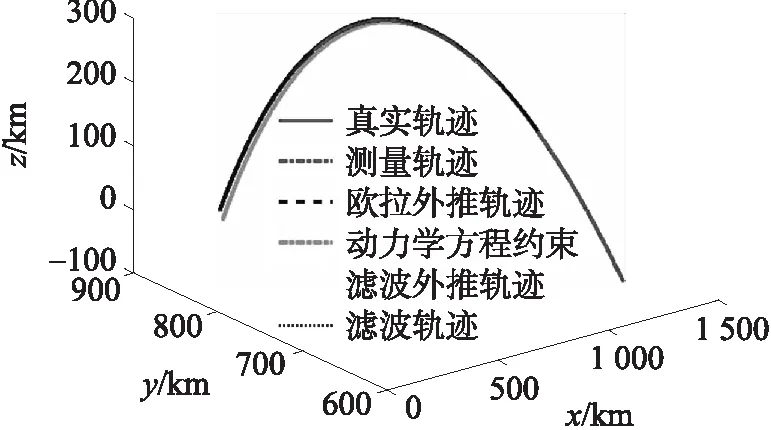
图3 ENU坐标系下空间目标三维轨迹
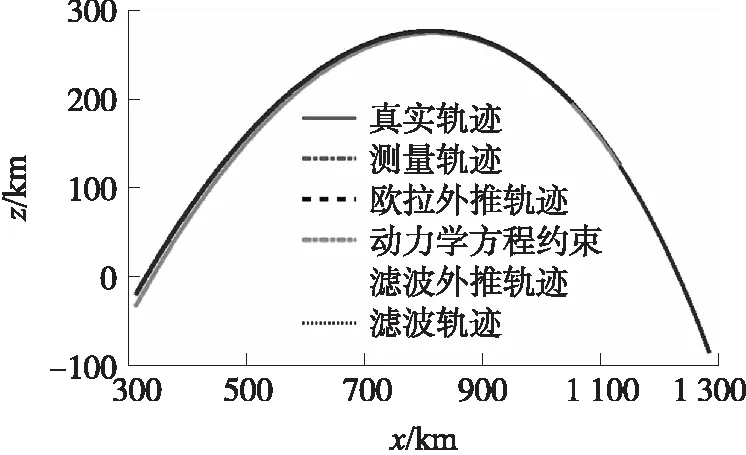
图4 ENU坐标系下空间目标x-z轴轨迹
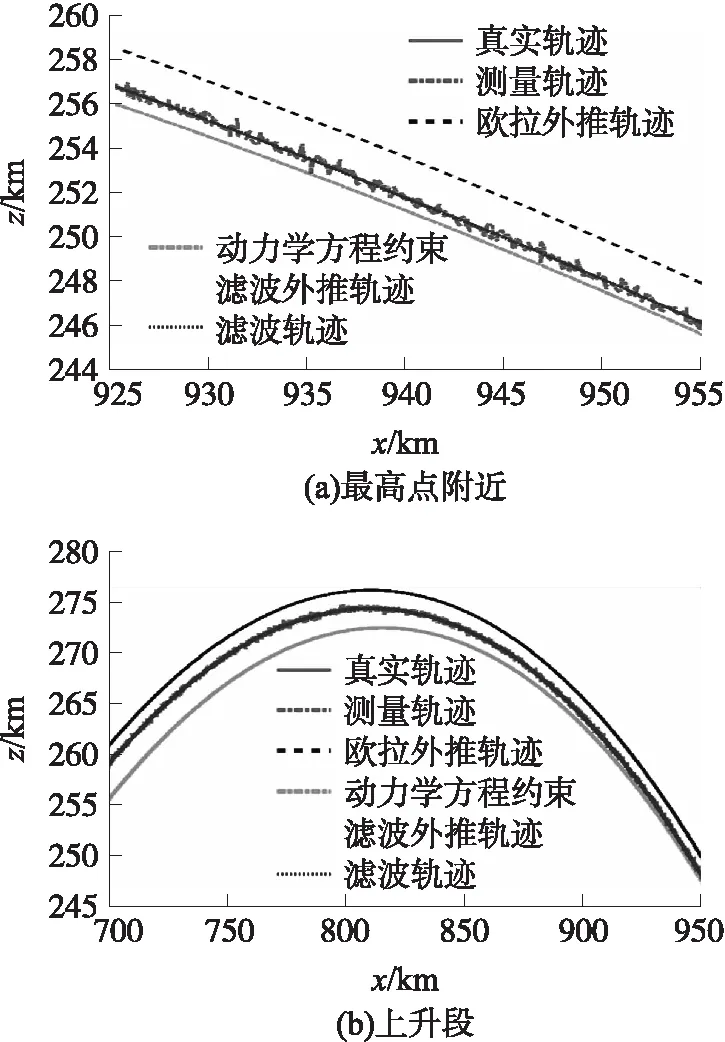
图5 ENU坐标系下空间目标x-z轴轨迹局部放大
由图1(a)和图2(a)可看出,滤波直线外推的预报效果较差,外推时间越长,预报的误差越大。由图1(b)和图2(b)可看出,ECI坐标系下欧拉方程外推和基于中段动力学方程约束的外推均可对空间目标运动轨迹进行较好的预报,但外推时间较长的情况下,欧拉方程外推轨迹的预报精度要高于动力学方程约束的外推预报精度。由图3~图5可看出,在空间目标上升段,欧拉方程外推轨迹的预报精度要略低于动力学方程约束的外推预报精度,随着预报外推时间的延长,在最高点附近欧拉方程外推轨迹的预报精度已经高于动力学方程约束的外推预报精度,并有以下结论:
①空间目标航迹片段关联中的预报外推只有结合目标动力学模型才能得到更准确的预报结果,进而才能保证一定的关联正确率。
②目标数据中断时间较短,基于欧拉方程外推和基于动力学方程约束的外推均可,可结合具体问题进行选择。
③目标数据中断时间较长,基于欧拉方程外推要优于基于动力学方程约束的外推。这是由于欧拉方程是在ECI坐标系下对空间目标运动轨迹进行预报外推。ECI坐标系是太阳系内的一个惯性坐标系,其相对于一个“固定的”恒星来说是不动的[1],它不随地球而转动,也不受地球、太阳运行的章动和岁差的影响。
图6为ENU坐标系下3个空间目标的运动轨迹,其中,图6(a)为三维空间轨迹图,图6(b)为与图6(a)相对应的x-z轴结果图,图6(c)和图6(d)为不同时间段图6(b)的局部放大结果。为了简单起见,假设中断前只有一个空间目标,中断后除了该空间目标外还有2个释放的诱饵目标。
由图6(c)可看出,航迹中断后刚开始一段时间内3个目标的跟踪效果较差,其中只有一个目标能够较好地跟踪,这一方面是由于该目标利用了中断前的航迹信息,另一方面是诱饵刚释放一段时间内其和空间目标的距离相对较近,影响了新出现目标的航迹起始;而由图6(d)可看出,随着跟踪时间的延长,这3个目标均可很好地进行跟踪。另外,由于图6(a)和图6(b)仅给出中断前后一段时间内的欧拉外推轨迹,所以图6(c)和图6(d)中无欧拉外推轨迹的显示。
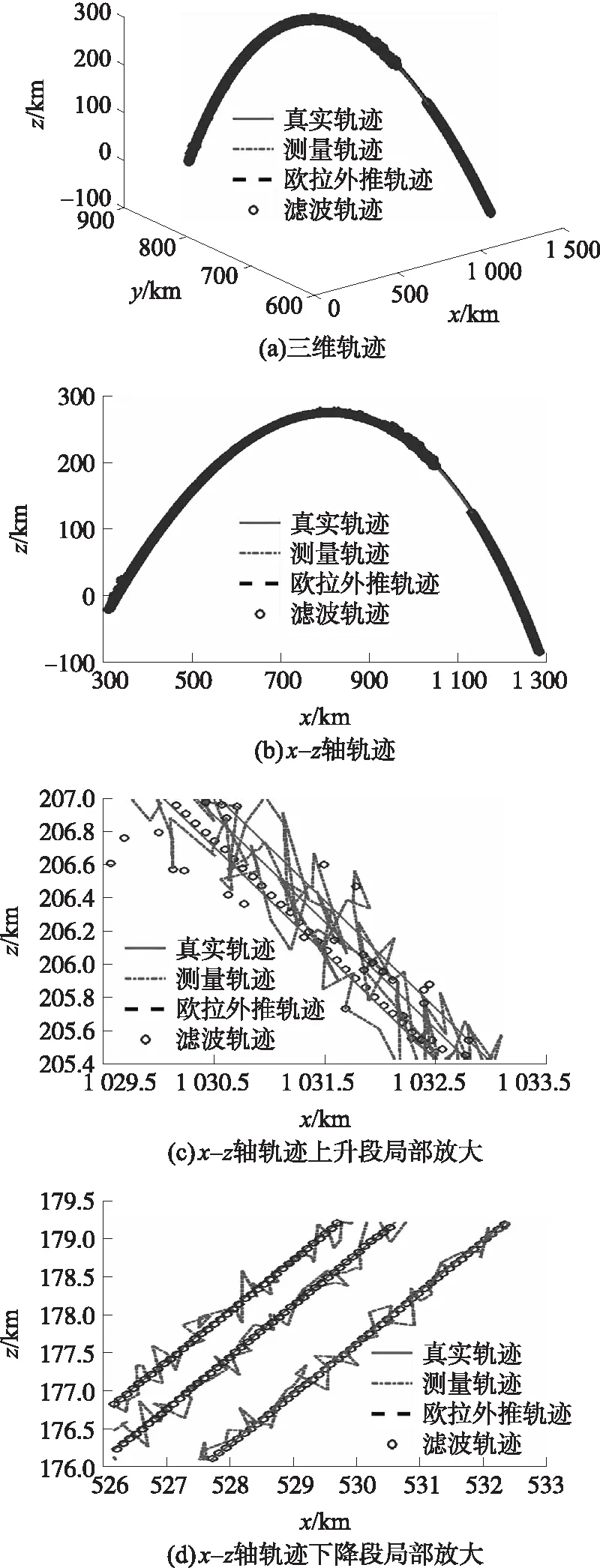
图6 ENU坐标系下3个空间目标的运动轨迹
4 结论
为了有效解决由于空间目标测量数据中断带来的短小航迹多、目标时跟时丢等问题,本文针对空间目标断续航迹关联问题进行了研究,并结合空间目标运动特点利用目标中段动力学模型对中断前的空间目标运动轨迹进行预报外推,同时对不同方法的外推预报结果做了比较分析,得出了相关结论。在此基础上,利用中断前航迹外推预报结果和中断后新起始的每个航迹段前几个时刻的状态更新值,构造相关检验统计量进行关联配对,实现空间目标中断前后航迹的关联融合,提高雷达系统有效跟踪目标数量,改善空间目标跟踪的连续性、稳定性和跟踪精度。
猜你喜欢
青年歌声(2019年12期)2019-12-17
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
北京航空航天大学学报(2017年7期)2017-11-24
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
中等数学(2017年2期)2017-06-01
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
