“无人机+激光雷达”在集通线复测中的应用
2020-10-12 04:36吕晓煜
铁道勘察 2020年5期
吕晓煜
(中国铁路设计集团有限公司,天津 300251)
1 研究背景
铁路既有线复测是一项较为复杂的工作,其主要工作包含:新建铁路与既有线接轨、曲线要素推算、拨距量计算、地形图修测、桥梁上跨下钻测量等。
传统既有线复测多采用钢尺、绝缘尺丈量里程,采用全站仪测量距离、偏角,使用GNSS RTK测量中线坐标,使用水准仪抄平。传统既有线测量方法具有精度较好、技术流程成熟等优点,但存在安全性差、上线困难、效率较低等问题:在直线地段,采用GNSS RTK测量中线坐标精度与效率较好,但在曲线段,其相对精度很难达到设计要求;如果遇到GNSS星历状态不好时,受限区域较多;绝缘尺丈量精度较低,全站仪丈量虽然精度好,但效率无法保障[1-3]。
近年来,许多学者针对既有线复测提出了一些新方法,如徐进军等将轨道状态测量仪应用于既有线复测,并提出采用零级电子轨距尺进行轨道测量[4],该方法具有自动化程度好、测量精度高等优点,但是基于高速铁路研制的轨道测量仪装备移动复杂,且只能在运营天窗内上线作业,难以适应常规普速有砟铁路天窗点少且时间短的现状。 周禹昆等研发了GNSS RTK既有线测量小车[5],其优点是集成了传统测量的GNSS RTK、方尺、支撑架、绝缘尺等设备,整体作业效率有较大的提高;其缺点是在曲线段落丈量精度较低,且作业效率有所降低。随着激光雷达的发展和普及,也有部分学者尝试采用车载激光雷达小车进行既有线复测[6],该方法具有自动化程度高、数据信息量大、效率高等特点,但需要安装扫描标靶,控制测量工作较大,且设备拆装较为复杂。
不难看出,以上方法均需要上线作业,作业前需要与既有线运营管理部门签订上线安全管理协议,手续繁琐。另外,线上作业时需工务人员配合,且受天窗时间限制,测量人员设备不能充分得到利用。
未来既有线测量向着自动化、高精度、非接触、大数据、高效率的方向发展,随着无人机技术和轻型机载LIDAR技术的快速发展,使得既有线复测工作有可能变得方便、快捷[7]。
2 激光雷达的特点
雷达系统采用激光作为传感的载体,测量精度和效率较高。由于激光波长很短,可以对极小的目标进行探测;而且激光雷达抗干扰能力强,不易受电波、地波的干扰,对多路径效应和等离子层的干扰也不敏感[8]。
由于航高原因,常规载人机的激光雷达通常只能得到稀疏点云;无人机平台的机载激光雷达由于航高低,将获得可观的点云数据。值得指出的是,无人机激光雷达无需上线作业且拆装方便,与铁路运营管理部门签订简单的协议后即可作业;无人机起飞场地受限小,作业灵活度和时间效率大幅提高。
3 无人机激光雷达数据采集与处理试验
目前,无人机机载激光雷达在既有线中的应用仍处于起步阶段,暂无大面积应用先例和规范。为验证其可行性与精度,设计了一套既有线复测的数据获取和处理方案。
本次集通线试验设备选用,经过多次比选,决定采用多旋翼无人机,该机型是一种具备垂直升降、悬停性能优异、移动灵活、机械结构紧密地小型无人飞行器,其有效载荷能达到8~10 kg,搭载RIEGL VUX_SYS系统后,单架次航飞时间约为20 min。飞行前,将设计航飞相关参数导入无人机系统即可实现自动数据获取,试验段线路里程全长10 km,累计飞行3架次。
3.1 设备主要技术参数
航飞相对高度为50 m,巡航速度为4.8 m/s, 航线间距为100 m,飞行区域按照预先航带设计导入并自动飞行。飞行过程中,应保证线路左右各有一条航带数据,原则上增加了既有线曲线段上的航线。系统搭载的激光发射器发射频率为200 kHz,IMU标称精度为0.015°,设计点密度为240 pts/m2,单航带实际点密度约为100 pts/m2,航飞后实际获取的点密度约为300 pts/m2。
3.2 基站布设
为保证无人机激光雷达扫描测量和GNSS/IMU技术的实施,需要在地面布设GNSS基站,并架设高精度GNSS信号接收机,与机载POS系统内置GNSS接收机同步进行GNSS观测,以实现动态DGPS相位差分测量定位。在铁路工程GNSS测量中,单个GNSS基站覆盖半径通常为50~300 km[9]。本次试验中,为确保得到高精度的激光点云数据,相邻GNSS基站间隔不大于5 km。
3.3 点云精度改正标志
测段范围内,平均每500 m布设1对平高控制点,分布于铁路两侧。每个点位处,依次布设2个“米字形”激光雷达平面靶标,平面靶标采用2根铝杆交叉一定角度并安置于三脚架上[10],目的是通过该装置精确提取靶标中心点位置,并将其作为点云平面改正的控制基础[11]。为尽可能准确计算激光点云与高程控制测量成果之间的系统差值,在平坦地面上,采用类似“九宫格”的方式布设高程控制点,用于改正高程精度,“米字形”平面靶标和“九宫格”控制点的布设如图1所示。

图1 “米字形”靶标与“九宫格”点
所有布设的点位通过喷漆或者画笔描绘的方式标识,以便后期进行控制测量,高程控制测量采用三等水准测量,平面控制测量采用GNSS快速静态测量,全线控制点成果通过整网平差计算得到。
3.4 激光点云数据扫描与处理
标志布设完成后,即可开展既有线点云数据获取工作,扫描过程中,无人机按预先设计的航线匀速飞行,激光点云数据处理的内容包括:航迹解算,点云航带裁剪与平差,坐标转换,点云精化,精度评价等[12],数据处理流程如图2所示。

图2 点云数据处理流程
3.5 激光雷达点云数据精化
初始DGPS/IMU联合平差后输出的激光点云难以达到既有线测量精度,故采用沿线布设的“米字形”平面靶标和“九宫格”高程控制点来提高激光点云的测量精度,点云平面坐标修正可采用
X=a1x0+b1y0+c1
Y=a2x0+b2y0+c2
(1)
式中,X,Y为修正前坐标;x0,y0为修正后的坐标;a1,a2,b1,b2,c1,c2为仿射变换参数。
“米字形”靶标提取过程为:提取单条铝杆点云并进行滤波分类,采用最小二乘法对分类提取的两条铝杆点坐标进行线性拟合,再用拟合出的两条线性方程求交点坐标。
激光点云高程的修正方法采用基于“九宫格”的高程拟合面进行改正,首先计算“九宫格”中所有点与其激光点云高程的差值dzi(其中i=1,2,3,…,9),然后采用式(2)求解沿线每处“九宫格”高程异常平均值δ,最后通过全线的高程异常均值建立改正模型进行改正。

(2)
3.6 既有线特征提取与轨面拟合
精化后的激光点云数据可用于铁路既有线信息提取,轨面信息特征提取的基础工作是激光点云的滤波分类,依次对全线范围内所有的轨面进行滤波分类,图3为其顶视图精细分类成果。
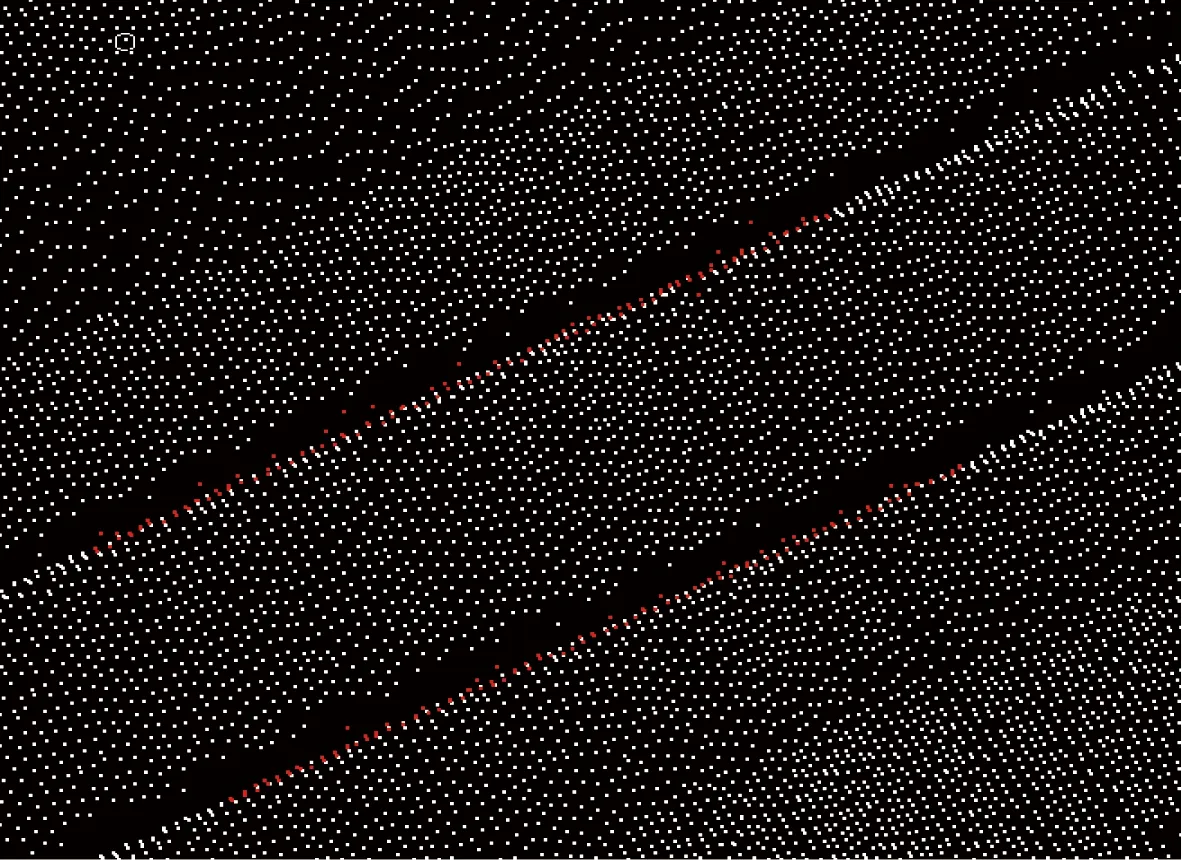
图3 轨面特征分类部分结果
分类后的轨面激光点云数据包含大量粗差点,需选取特征点进行轨面拟合,拟合的结果为1组离散的坐标点,用于待求里程坐标的平差。提取特征点采用人工方式,以3~5 m的间隔,依次确定左右轨面中心特征点。随后,对中心特征点的轨面数据构建三角网,逐点判断拟合点在三角网中的位置,并基于坡度、位置等几何关系,再次剔除粗差点。提取轨面中心特征点后,根据直线段50 m 1个点,曲线段20 m 1个点建立对应未知关系,导入既有线测量软件中进行平差计算(见图4)[13],平差后的结果为里程、坐标、高程。

图4 既有线中线坐标平差
4 精度分析
为验证新方法在既有线轨面坐标提取精度,采用常规测量方法对其进行验证。试验线路区间两侧共布设米字平面靶标控制点22个,九宫格高程控制点225个。
平面测量采用GNSS-RTK采集,有效观测时间大于20 s,高程采用四等水准测量。共采集平面有效检测点41个,高程有效检测点32个。作为试验参照组,未精化激光点云数据与常规实测的检查点对比精度统计如表1所示。

表1 未精化激光点云数据精度统计 m
经平面和高程精化后,将点云数据与实测数据进行比较,其精度统计如表2所示。

表2 精化后激光点云数据精度统计 m
统计结果显示,精化后的轨面坐标精度有显著提高,利用平差后的坐标成果与查询的既有线平面曲线参数进行拨距计算与横纵断面测量,其轨面平面、高程精度能够满足既有线一般工程的计算需要[14-15]。
5 结论
(1)轻型激光雷达可以搭载于旋翼无人机平台,经过系统集成和改造后,其测量成果可应用于铺速有砟既有线一般工程的常规作业,但不可用于施工和接轨。
(2)无人机机载激光雷达技术具有周期短、效率高、安全性好、劳动强度低和作业灵活等优势,可以弥补传统测量的不足。
(3)在每500 m布设1对控制点的情况下,采用米字形靶标平面控制点和九宫格高程控制点进行点云精度改正,其平面和高程中误差为3 cm和3.4 cm。
猜你喜欢
今日农业(2022年4期)2022-11-16
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
军民两用技术与产品(2021年10期)2021-03-16
幽默大师(漫话国学)(2020年12期)2020-12-03
亚太教育(2020年6期)2020-06-12
计算机研究与发展(2019年9期)2019-09-16
师道·教研(2019年7期)2019-08-13
电子制作(2018年16期)2018-09-26
汽车电器(2017年1期)2017-12-06