GPS/BDS 实时精密单点定位性能分析
2020-10-13 12:01程国祥
科技创新与生产力 2020年10期
程国祥
(安徽理工大学空间信息与测绘工程学院,安徽 淮南 232001)
1 GPS/BDS 实时精密单点定位性能的研究背景
精密单点定位 (Precise Point Position,PPP)技术自提出以来一直是卫星导航定位高精度应用的前沿和热点[1]。目前,通过国际的全球导航卫星系统 (Global Navigation Satellite System,GNSS)服务机构或分析中心提供的精密轨道及钟差产品,在全球范围内使用单台接收机就能完成PPP,实现厘米级至米级的定位精度[2-3]。
PPP 所依靠的精密产品往往具有一定的时延,不能满足PPP 的实时应用。为了满足对实时PPP(Real Time PPP,RTPPP)的需求,国际的GNSS服务机构于2013 年开始提供实时精密产品。目前,多家服务机构已提供多系统实时服务,已有一些学者对各服务机构提供的实时服务进行了研究,其中大部分是基于 GPS/GLONASS 或 GPS/GLONASS/Galileo 的多系统组合RTPPP,但是其侧重点各有不同[4-6]。
但是,在北斗卫星导航系统(BeiDou navigation satellite System,BDS)RTPPP 服务方面,目前仅有法国国家空间研究中心 (Centre National d'études Spatiales,CNES)的实时精密产品CLK93 提供BDS实时状态空间表示 (State Space Representation,SSR)改正信息,为BDS 提供实时产品支持,且仅支持BDS-2 卫星,包括5 颗GEO 卫星、6 颗IGSO卫星、3 颗MEO 卫星。对于BDS 单系统RTPPP 研究已经初步开展,且证明了BDS 对多系统组合PPP性能提升做出的贡献[7-9]。
为了进一步对 BDS RTPPP 及 GPS/BDS 组合RTPPP 性能进行分析,本文基于GPS 与BDS 进行组合RTPPP 研究,以期为BDS RTPPP 推广提供参考。本文采用CNES CLK93 播发的BDS 实时轨道、钟差产品,对 5 个多 GNSS 实验 (Multi-GNSS Experiment,MGEX) 测站 2019 年 DOY 098 数据,在BDS,GPS,BDS/GPS 3 种模式下进行RTPPP 解算,并从收敛时间和定位精度两方面对其性能进行分析。
2 实时精密单点定位模型
2.1 观测方程组
在进行PPP 时,GNSS 基本观测方程组为

式中:P 和Φ 分别为伪距和载波的观测值;ρ 为卫星和接收机之间的集合距离;c 为光速;r 和s 分别为接收机和卫星;dtr和dts分别为接收机和卫星钟差;dr和ds分别为接收机和卫星与频率相关的码偏差;T 为对流层延迟;ε(P)和ε(Φ)分别为位居和载波观测值的测量噪声及未模型化误差;λ 为对应频率的波长;br和bs分别为接收机和卫星端的相位偏差;N 为模糊度。对于双频PPP,目前主要组合方式有消电离层 (Ionosphere Free,IF)组合方式、UofC模型组合方式和非组合模型组合方式。选取IF组合方式消除一阶电离层的影响[10-14],表达式方程组为
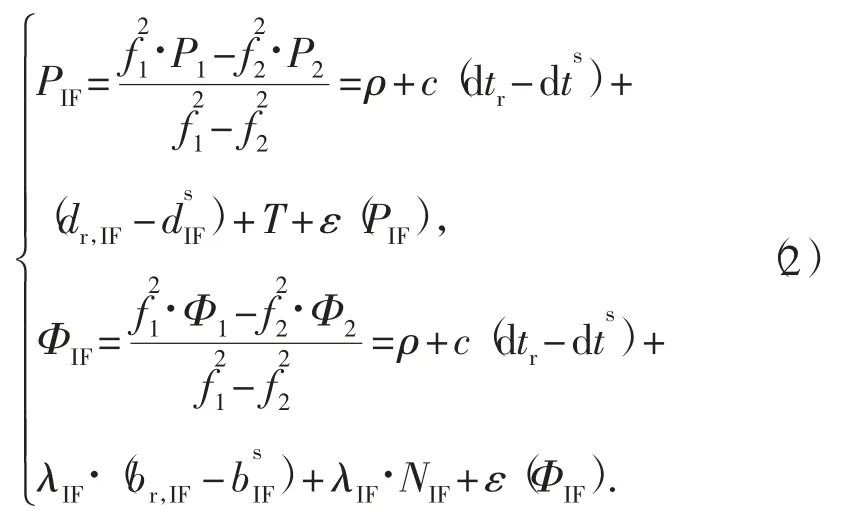
式中:PIF和ΦIF分别为IF 组合后的伪距和载波的观测值;dr,IF和分别为IF 组合后的接收机和卫星端的码偏差;ε(PIF)和 ε(ΦIF)为 IF 组合的测量噪声及未模型化误差;λIF为IF 组合后的频率波长;br,IF和为IF 组合后的接收机和卫星的相位偏差;NIF为IF 组合后的模糊度;其余参数同式 (1)。
2.2 参数估计及误差处理策略
通过IF 组合消除电离层延迟一阶项的影响后,RTPPP 待估参数包括测站坐标、接收机钟差、天顶对流层延迟以及模糊度参数,使用卡尔曼(Kalman)滤波进行参数估计。随机模型选取高度角模型,采用以卫星高度角定权的随机模型时,可以根据正弦函数模型建立随机模型,表达式方程组为
BDS RTPPP 处理策略与GPS 类似,由文献[15-16]可知,GEO 轨道卫星实时产品精度较差,因此在进行高度角定权时对GEO 卫星观测值进行降权。取截止高度角为7°。RTPPP 的参数估计及误差处理策略见表1。
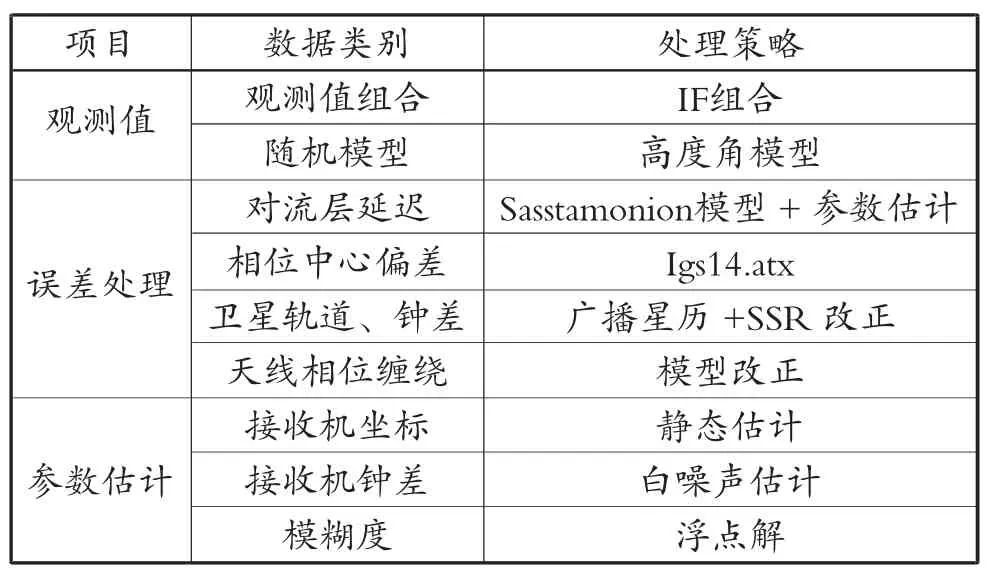
表1 RTPPP 的参数估计及误差处理策略
3 GPS/BDS 实时精密单点定位实验及其分析
3.1 实验说明
为了分析 GPS/BDS RTPPP 精度,选取 5 个MGEX测站 (分别为DAEJ,HKSL,HKWS,JFNG,PERT 测站)的2019 年DOY 98 观测时段,通过BKG NTRIP Caster 接收CLK93 实时数据流对广播星历改正,获取并存储实时轨道及钟差产品 (https://igs.bkg.bund.de/ntrip/orbits),实时轨道和钟差数据采用实时SSR 改正信息。按照表1 的数据处理策略[17],分别对实验数据以1 d 为单位进行解算,将国际 GNSS 服务 (International GNSS Service,IGS)周解坐标作为参考值,统计不同测站不同时段PPP的收敛时间及定位误差,从均方根误差 (Root Mean Square Error,RMSE)角度对定位精度进行分析。
3.2 实验结果分析
为了直观呈现3 种方案下N,E,U 方向收敛趋势,选取HKSL 测站定位误差序列,见第58 页图1。从图1 可以看出,3 种方案收敛趋势较为明显,GPS/BDS 组合及GPS 方案均能在很短时间内收敛至稳定值,但是BDS 系统RTPPP 序列存在较长时间未收敛的情况。图1 给出了3 种方案下的可视卫星数,由此可以看出由于GPS/BDS 双系统有更多的可视卫星数及更好的空间几何结构,因此表现性能优于单系统解,且可明显看出单BDS 表现性能较差,体现在波动较大、收敛较慢。
3.2.1 收敛时间分析
第 58 页图 2 为 GPS,BDS 和 GPS/BDS 3 种方案下5 个测站的RTPPP 收敛时间。对于收敛时间定义如下:从开始历元起,某一历元偏差小于10 cm 并且之后连续20 历元的平均偏差也满足此要求,则从开始历元到该历元的观测时间为收敛时间。从图2 可以看出,单BDS RTPPP 收敛时间较长,收敛到分米级均需要70 min 以上;单GPS 收敛时间优于单BDS RTPPP,最长需要60.5 min,最短需要23 min;GPS/BDS 组合收敛时间最短,均能在20 min 左右收敛到10 cm。从平均数值角度评价,GPS,BDS 和GPS/BDS 3 种方案的平均收敛时间分别为38.8 min,94.7 min 和21.6 min,GPS/BDS双系统RTPPP 收敛时间相对于单GPS 和单BDS 分别提高了44%,77%。
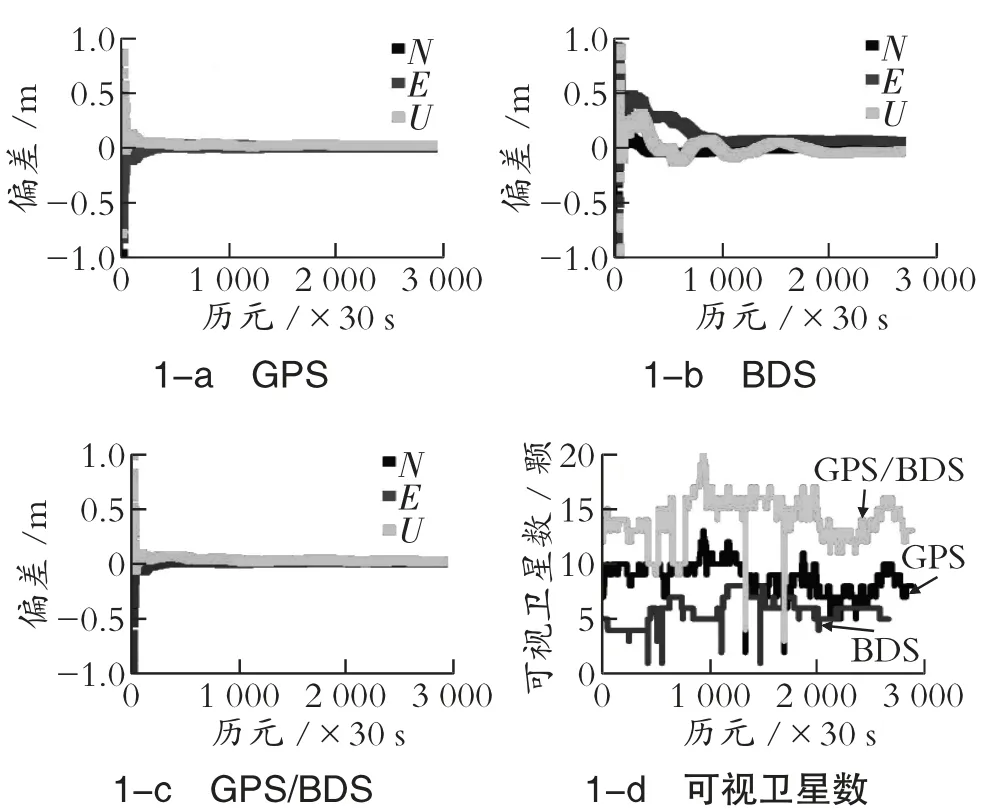
图1 HKSL 测站的收敛序列及各系统可视卫星数
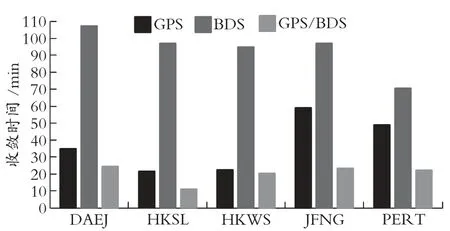
图2 3 种方案下各个测站的RTPPP 收敛时间
3.2.2 定位精度分析
从收敛后RMSE 角度对定位精度进行分析,RMSE 为RTPPP 解算结果与IGS 周解文件坐标之间的差值。图3 为GPS,BDS 和GPS/BDS 方案下5 个测站的N,E,U 方向收敛后定位精度,即3 种方案下5 个测站的单天解定位偏差结果。由图3 可以看出,3 种方案下,E,N 方向定位精度优于U 方向,单GPS 定位精度较好,除DAEJ 测站U 方向偏差在3 cm 左右,其余收敛后偏差均在2 cm 以内;同样地,GPS/BDS 组合定位精度与GPS 定位精度相当,均优于2 cm;BDS 定位精度最差,N 方向定位精度优于5 cm,E 方向定位精度在5 cm 左右,除PERT 站U 方向定位精度为15 cm,其余测站U 方向定位精度均优于5 cm。

图3 3 种方案下各个测站的N,E,U 方向收敛后定位精度
表2 为3 种方案下N,E,U 方向收敛后的平均定位精度,即各方案下N,E,U 方向定位结果平均值。由表2 中各个方向的平均定位精度可以看出,GPS/BDS 在N,E,U 方向收敛后定位精度分别为0.94 cm,1.63 cm,2.25 cm,相对于单BDS 的2.73 cm,5.91 cm,7.16 cm,分别提高了 66%,72%,69%,改善效果明显。单BDS 定位精度偏低的可能原因是目前BDS 全球跟踪站数目较少,地面控制网不能很好地覆盖全球,导致实时轨道及钟差改正信息解算精度低于GPS。
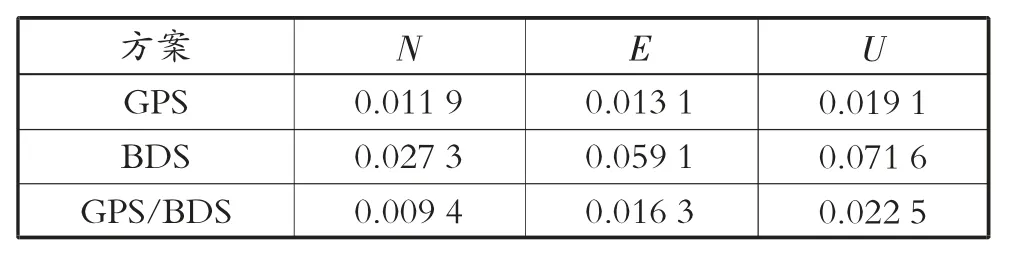
表2 3 种方案下N,E,U 方向收敛后的平均定位精度 (m)
3.2.3 ZTD 精度分析
通过列举DAEJ 及HKSL 测站的对流层天顶延迟 (Zenith Tropospheric Delay,ZTD)序列 (见第59 页图4)可以看出,GPS/BDS 所求ZTD 序列均处于2.5 m 左右,而BDS 所求ZTD 精度稍差于GPS,在初期因为可视卫星数较少,需要较长时间收敛到稳定值,并且BDS 所求ZTD 序列存在波动情况。在使用PPP 进行对流层反演过程中,需对BDS 进行特别关注。
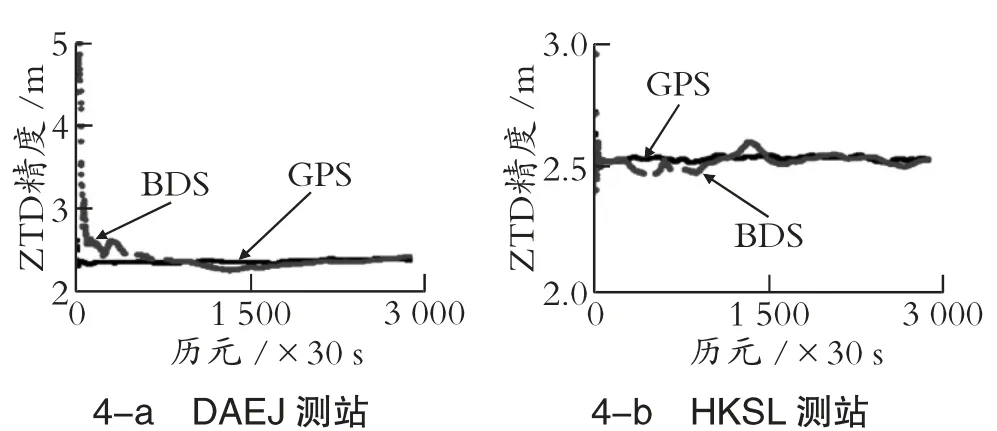
图4 DAEJ,HKSL 测站的PPP 解算ZTD 序列
4 结论
本文采用CNES 的多系统实时轨道和钟差信息,实现了GPS,BDS 以及GPS/BDS 组合RTPPP,并对定位精度进行分析。结果表明,GPS/BDS 组合能够较好地提高单BDS 收敛时间,单GPS 系统收敛效率与 GPS/BDS 组合相当,GPS/BDS 双系统RTPPP 平均收敛时间为21.6 min,相对于单BDS 的94.7 min、单GPS 的38.8 min,分别提高了 77%,44%。定位精度上,GPS/BDS 组合对单GPS 改善效果不明显,且两种方案下N,E,U 方向的定位精度均优于3 cm,单BDS 定位精度较差,N 方向定位精度优于5 cm,E 方向定位精度在5 cm 左右,U 方向除个别测站外定位精度也在5 cm 左右;GPS/BDS 在N,E,U 方向收敛后的定位精度分别为0.94 cm,1.63 cm,2.25 cm,相对于单 BDS 的2.73 cm,5.91 cm,7.16 cm,分别提高了 66%,72%,69%,改善效果明显。
由此可知,在RTPPP 方面,GPS 的加入使得BDS RTPPP 效果改善较大,一部分原因在于目前CNES 等机构提供的公开RTPPP 服务仅局限于BDS-2 卫星,随着BDS-3 组网完成及BDS-3 系统完善的导航定位和授时 (Positioning, Navigation and Timing,PNT)服务体系,BDS RTPPP 的性能有望进一步提高。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2021年4期)2021-08-29
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
导航定位学报(2018年3期)2018-09-03
雷达学报(2017年1期)2017-05-17