
基于幂次趋近律的电流型有源滤波器变结构控制
2020-10-21 11:19何献章王景华李冬冬王以忠
天津科技大学学报 2020年5期
侯 勇,何献章,王景华,李冬冬,王以忠
(1. 天津科技大学电子信息与自动化学院,天津 300222;2. 河北德瑞特电器有限公司,石家庄 050000)
随着电力电子技术的快速发展和电力变流装置广泛应用,电力系统中的非线性和冲击性负载越来越多,并且感性负载居多,导致谐波、功率因数低、电压波动、闪变、三相不平衡等电能质量问题.并联型有源滤波器(active power filter,APF)是能够有效改善上述电能质量的重要装置之一,并具有响应速度快、对系统和负载参数变化适应能力强等独特优点[1-4].常用的并联型 APF大都采用电压源型(voltage source,VS)结构,以电容器作为直流储能元件,在降低开关损耗、消除载波谐波方面占有一定优势.目前,电流源型(current source,CS)逆变器的APF结构逐渐受到重视,其显著优势在于:与VSAPF相比,并联注入电流的控制更加简捷,负载变化相应速度更快,并且不会发生因主电路开关器件直通而引发的短路故障[5-8].但由于 CSAPF直流侧采用电感储能,需持续维持储能电流,而常规电感的电阻会产生较大的损耗,不宜用作独立的储能元件.理想的方式是采用超导储能(SMES)线圈,但目前超导磁体只有在足够低的临界温度下才能运行.随着超导材料和超导机理研究的不断发展,常温超导指日可待,使得电流源型逆变器具有广阔的应用前景和商业价值[9-11].而在APF控制策略上,通常采用基于比例积分(PI)控制的调节器和电流滞环控制方法,传统的 PI控制对系统参数有较强的依赖性,动态性能较差;电流滞环控制方法简单易行,不受系统参数影响,但功率开关器件的频率不固定,不利于逆变器的滤波器设计,且存在着较高的开关应力[12].滑模变结构控制是一种动态响应快、抗干扰能力强的非线性控制方法,非常适于APF的控制要求.本文针对CSAPF结构特征和状态模型,研究了一种基于幂次趋近律滑模变结构的控制策略,通过调整幂次参数加速向滑模面的趋近过程,能够很好地抑制滑模变结构控制的抖振现象.
1 主电路结构和原理
CSAPF的电路拓扑如图 1所示,变流器的交流侧与负载并联,直流侧以超导线圈为储能元件.通过适当的检测算法,如目前常用的基于瞬时无功功率理论的电流检测方法,实时地检测出三相负载电流中的谐波分量、无功功率分量和负序分量的总和,以此电流为参考值,控制变流器产生向公共连接点注入的电流,从而使电源电流保持为三相对称且与电源电压同相位的正弦波,实现系统的设计功能.
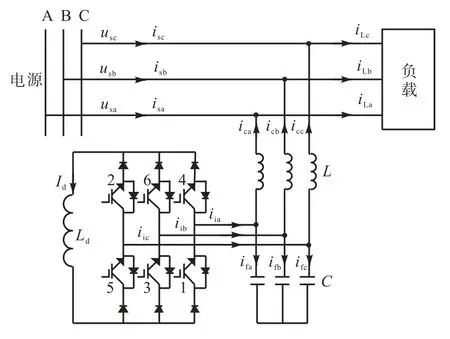
图1 主电路结构Fig. 1 Main circuit structure
2 基于幂次趋近律的滑模变结构系统控制策略
滑模变结构控制因其对参数摄动、外界干扰等具有完全鲁棒性,越来越多地被用于电气自动化控制.影响滑模变结构控制应用的突出障碍是抖振现象,目前有效削弱抖振的方法采用基于趋近律的滑模控制[14].基于趋近律的方法有多种,其中基于幂次趋近律的方法是令滑模面函数满足:

由式(1)可解得

式中:s0是s的初值.
由式(2)可看出:通过调整式中的幂次α值,可保证当系统状态远离滑模面时,能够以较快的速度趋近滑模面,而当系统状态接近滑模面时,趋近速度变小,从而减小了抖振.
针对当前电力负荷的特点,以及 CSAPF的结构和状态模型,设计了基于幂次趋近律的滑模变结构控制策略.
由图1可建立CSAPF的状态模型为
其中,us为电源电压,uc为滤波电容电压,ic为 APF向公共连接点的注入电流,if为逆变器滤波电流,ii为逆变器输出电流,L为滤波电感,C为滤波电容.
由式(3)得

建立系统的状态空间表达式
应用基于瞬时无功功率理论的谐波和无功电流实时检测方法[1],可得到 APF并联注入电流的参考值:

以系统电流误差e及其导数e˙为状态变量,即

设计切换函数为

采用式(1)的幂次趋近律方法,联立式(5)、(6)、(7)可得

联立式(1)和式(8),可求得控制为

采用电流矢量 PWM(也称直接电流 PWM)策略,以式(9)求得的三相瞬时电流 iia、iib、iic为控制目标,获得逆变器全控型开关器件的触发脉冲,完成系统的闭环控制.
3 仿真与分析
为了验证CSAPF幂次趋近律滑模变结构控制策略的有效性,分别针对系统带非线性负载、冲击性负载和三相不对称负载这3种典型的电能质量情况,利用电力系统专业仿真工具 PSCAD/EMTDC进行了仿真.
仿真中,选择电源线电压有效值为 380V,频率为 50Hz,滤波电感为 0.11mH,滤波电容为 400μF,逆变器直流侧电流为 400A,逆变器开关控制频率为5kHz.
3.1 谐波和无功负载的仿真分析
以三相桥式不可控整流负载作为系统的谐波源,其直流侧串联电感与电阻参数为 L1=0.05H,R1=10Ω;选择三相对称的电阻-电感元件为无功负载,其参数为 L2=0.04H,R2=10.4Ω.二者并联连接,作为仿真时的总负载.
图 2是 A 相电源电压(usa)、电源电流(isa)和负载电流(iLa)的仿真曲线.从仿真结果可见,负载电流曲线为明显的非正弦波,分析可知:其中含有谐波电流和无功电流分量,通过 CSAPF的作用可使电源电流控制为与电源电压同相位的正弦波.
为定量说明滤波效果,将负载电流和电源电流的PSCAD仿真结果输出到数据文件,利用Matlab对A相负载电流和电源电流进行频谱分析,结果如图3和图4所示.
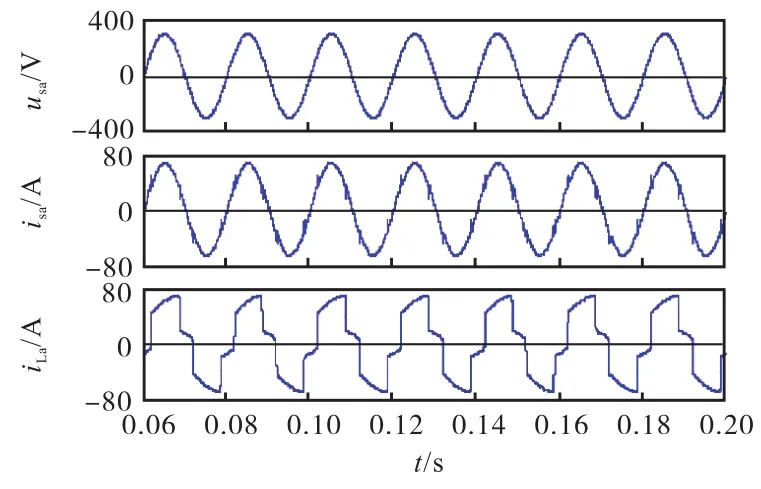
图2 A相电流的滤波效果Fig. 2 Filtering effect of phase A current
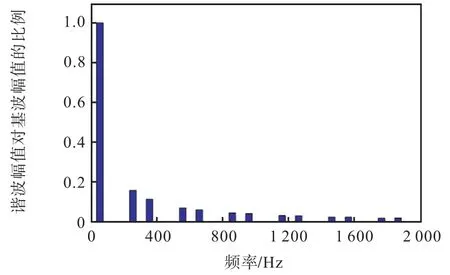
图3 A相负载电流频谱Fig. 3 Frequency spectrum of phase A current
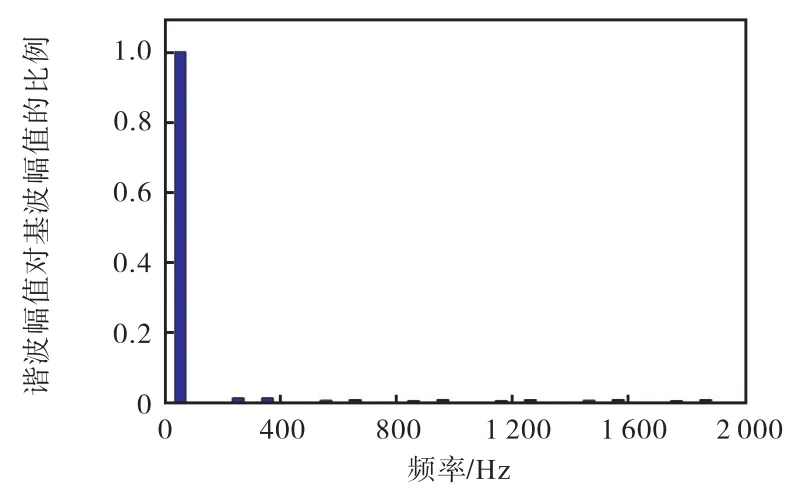
图4 A相电源电流频谱Fig. 4 Frequency spectrum of phase A source current
分析结果显示:A相负载电流含有较强谐波成分,其中较强的5次和7次谐波的幅值分别为基波幅值的15.91%和11.39%;而A相电源电流中的5次和7次谐波幅值分别仅为基波幅值的 1.52%和 1.54%,达到较好的有源滤波效果.
3.2 冲击性负载下的仿真分析
仿真中,设置系统除了带有仿真1中的非线性和无功性质的负载外,在 0.1s时突加同样大小的线性负载,负载的仿真模块如图 5所示,仿真结果如图 6所示.
由图 6可见:当负载发生突变时,控制策略能在小于 1/4周期,即小于 0.005s的时间内达到稳定状态,保证电源电流波形为正弦,并且电压电流同相位.该控制策略对冲击负载具有良好的动态特性.

图5 冲击负载仿真模块图Fig. 5 Simulation module of impact load

图6 冲击负载时的仿真结果Fig. 6 Simulation results of impact loads
3.3 不对称负载的仿真分析
设置系统除仿真1中的负载外,还带有三相不对称负载,其三相阻抗参数分别为:La=0.0017H,Ra=2.0Ω;Lb=0.0017H,Rb=1.8Ω;Lc=0.0017H,Rc=0.9Ω.仿真结果如图7—图9所示.

图7 不对称负载时A相电源电流、电压Fig. 7 Phase A source current and voltage under unbalanced load
由图8可见:在非线性负载和不对称负载共同存在时,三相负载电流除了含有谐波分量之外,还会出现基频分量幅值大小不同,且三相电流的相位不对称的现象.由图7和图9可见:在同时带有非线性和不对称负载时,电源电流仍能保持为三相对称的正弦波,且与电源电压同相位.仿真结果表明,该控制策略除了具有良好的有源滤波和无功补偿效果,同时可以有效抑制不对称负载对电源电流对称性的影响.

图8 不对称负载时的负载电流Fig. 8 Load current under unbalanced load
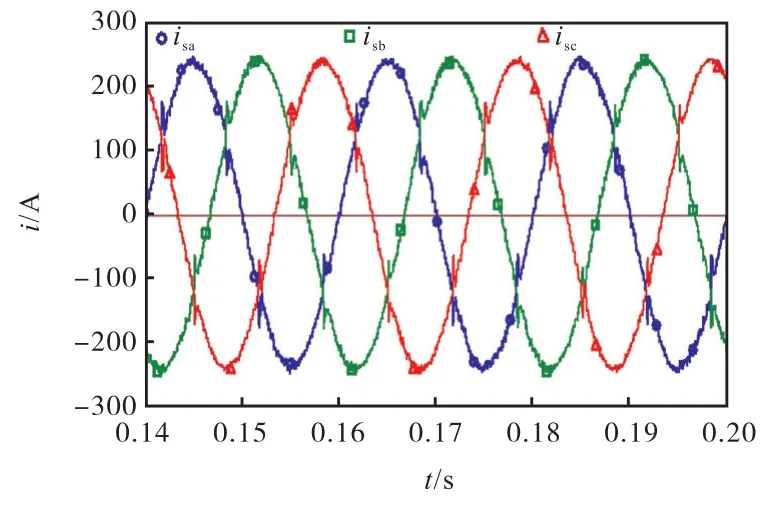
图9 不对称负载时的电源电流Fig. 9 Source current under unbalanced load
4 结 论
电流型逆变器对并联型电能质量调节装置具有其特定优势和适用性,在电力有源滤波器中采用电流型逆变器的主电路结构,可以有效提升其运行性能.对于常见的非线性、冲击性和三相不对称负载,有源滤波器的指令电流具有较强的不确定性,采用幂次趋近律滑模变结构控制可以很好地对指令电流进行跟踪补偿,具有响应速度快、鲁棒性好等特点.利用仿真软件 PSCAD对常见的电能质量问题负载工况进行的运行仿真分析充分验证了所研究控制策略的有效性.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
软件(2020年3期)2020-04-20
电子制作(2019年23期)2019-02-23
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年4期)2017-11-23
