机电伺服扭矩测试系统溯源分析及不确定度评定
2020-10-21 23:41匡德强
大众科学·下旬 2020年5期
匡德强

摘 要:把握机电伺服扭矩测试系统的准确性,一直以来都产品制造行业积极研究的问题。对机电伺服扭矩测试系统进行静态溯源方式和动态溯源方式研究,可以较好地实现对其使用过程的影响因素分析,提高其系统使用的可靠性和有效性。同时,结合影响因素对系统展开不确定度评定,可以全面地实现机电伺服扭矩测试系统的数据分析论证,为产品测试数据的真实性提供有力保障。
关键词:机电;扭矩;动态;不确定度
1 引言
机电伺服扭矩测试系统,是测试和验证弹性轴类零件材料试验和研究的关键设备之一,被广泛应用于航天航空、轨道交通、零件制造、质量检验等领域,是对产品进行扭矩测试和性能分析的重要设备,其准确性直接决定了产品在实际使用过程的的安全性和有效性。本文结合机电伺服扭矩测试系统的计量溯源方式,对系统的镜头扭矩和动态扭矩进行了分析和阐述,并对其过程不确定度进行了评定。
2 机电伺服扭矩测试系统溯源分析
在航天航空领域,常见机电伺服扭矩测试系统主要分为静态扭矩测试和动态扭矩测试两种工作状态。
2.1 静态扭矩计量溯源
机电伺服扭矩测试系统静态扭矩校准装置主要由标准扭矩传感器、校准工装和数据采集分析系统等部分组成。测试用扭矩传感器安装于原工位上,加装扭矩校准工装,将测试用扭矩传感器、标准扭矩传感器和弹性负载同轴连接,测试系统控制器输出控制命令,产生静态扭矩激励,数据采集分析系统采集动态扭矩传感器的输出信号,并进行分析计算,将计算结果与测试系统显示的扭矩值进行比对,完成校准。校准时,以型号产品测试用到的静态扭矩最小值作为参数校准的下限、最大值作为参数校准的上限,在此范围内选择5~10个点进行校准,校准点在此范围内均匀分布。選择一个方向,施加预负荷3次,每次额定负荷的时间至少保持30s,每次预负荷被完全卸除后,等待回零时间为30s,检查设备的回零情况,保证工装及传感器安装不影响传感器回零。
按选定的检定点(包含零点)以递增顺序逐级平稳施加扭矩,直至校准范围的上限,读取并记录标准扭矩测量装置的输出值MRIij、被校扭矩测量装置的输出值MYIi,再逐级递减至零点,读取并记录标准扭矩测量装置的输出值MRDij、被校扭矩测量装置的输出值MYDij,并将上述操作重复三遍,每遍间隔不低于30s,校准过程中不进行调零操作,I、D、i、j分别表示正向、反向、静态扭矩值序号和循环序号。静态扭矩参数校准的项目包括回零误差、重复性和示值误差,各技术指标的计算方法如下:
a.回零误差
式中,X0i'为第i次测量施加扭矩前机电伺服机构扭矩测量装置的示值,X0i为第i次测量卸除扭矩后机电伺服机构扭矩测量装置的示值,XNi为第i次测量额定扭矩下机电伺服机构扭矩测量装置的示值。
b.重复性
式中,Xmax为机电伺服机构扭矩测量装置3次测量进程示值的最大值,Xmin为机电伺服机构扭矩测量装置3次测量回程示值的最小值,X为机电伺服机构扭矩测量装置3次测量进程示值的平均值。
c.示值误差
式中,X为机电伺服机构扭矩测量装置3次测量进程示值的平均值,XS为标准扭矩测量装置3次测量进程示值的平均值。
2.2 动态扭矩计量溯源
机电伺服扭矩测试系统动态扭矩校准装置主要由标准扭矩传感器、校准工装和数据采集分析系统等部分组成。
测试用扭矩传感器和弹性负载安装于原工位上,加装扭矩校准工装,将测试用扭矩传感器、弹性负载和标准扭矩传感器同轴连接,测试系统控制器输出控制命令,产生动态扭矩激励,数据采集分析系统采集动态扭矩传感器的输出信号,并进行分析计算,将计算结果与测试系统显示的动态扭矩幅值进行比对,完成校准。
3 机电伺服扭矩测试系统不确定度评定
3.1 机电伺服扭矩测试系统静态扭矩参数的不确定度评定
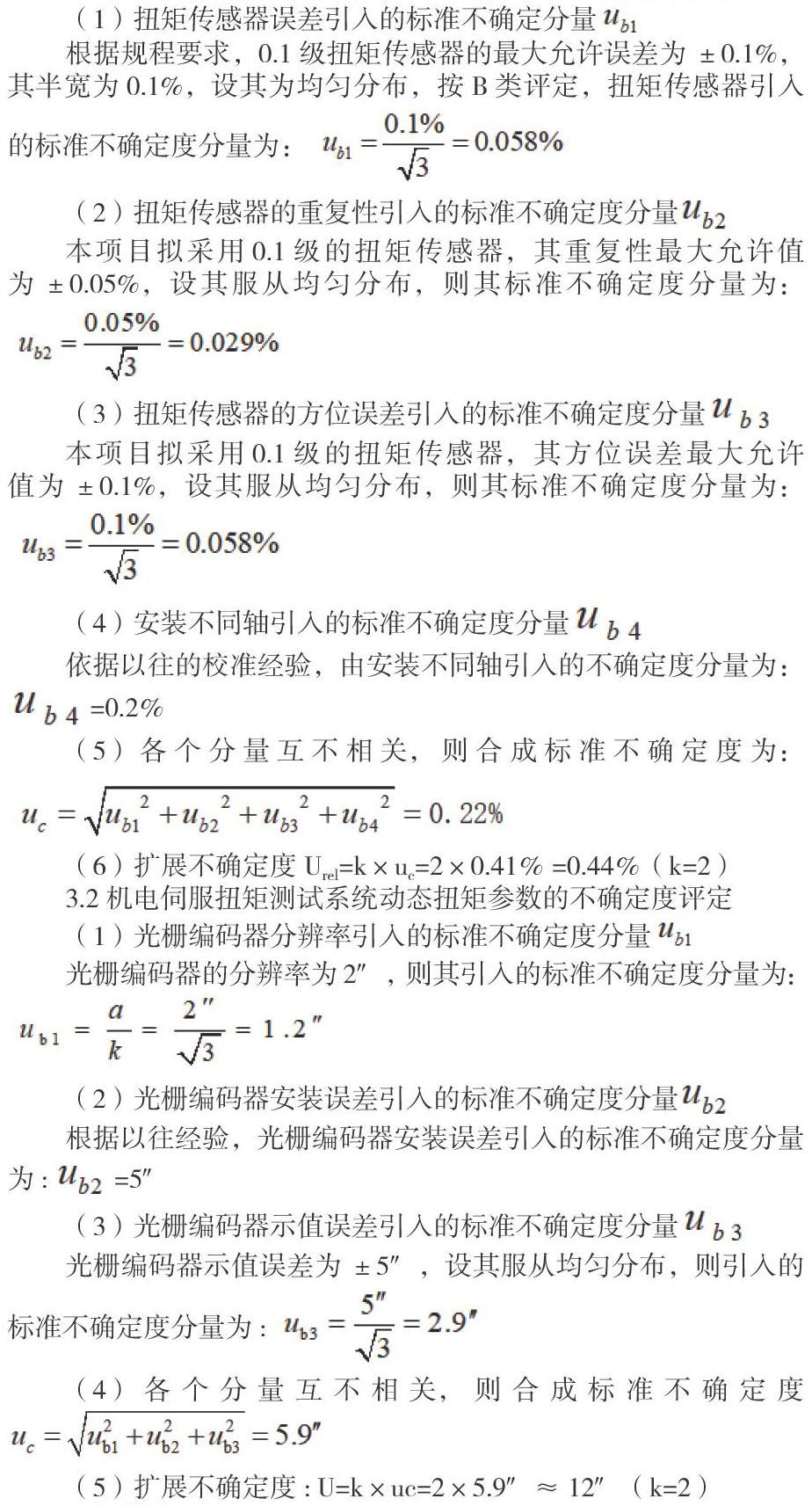
(1)扭矩传感器误差引入的标准不确定分量
根据规程要求,0.1级扭矩传感器的最大允许误差为±0.1%,其半宽为0.1%,设其为均匀分布,按B类评定,扭矩传感器引入的标准不确定度分量为:
(2)扭矩传感器的重复性引入的标准不确定度分量
本项目拟采用0.1级的扭矩传感器,其重复性最大允许值为±0.05%,设其服从均匀分布,则其标准不确定度分量为:
(3)扭矩传感器的方位误差引入的标准不确定度分量
本项目拟采用0.1级的扭矩传感器,其方位误差最大允许值为±0.1%,设其服从均匀分布,则其标准不确定度分量为:
(4)安装不同轴引入的标准不确定度分量
依据以往的校准经验,由安装不同轴引入的不确定度分量为:=0.2%
(5)各个分量互不相关,则合成标准不确定度为:
(6)扩展不确定度Urel=k×uc=2×0.41%=0.44%(k=2)
3.2 机电伺服扭矩测试系统动态扭矩参数的不确定度评定
(1)光栅编码器分辨率引入的标准不确定度分量
光栅编码器的分辨率为2″,则其引入的标准不确定度分量为:
(2)光栅编码器安装误差引入的标准不确定度分量
根据以往经验,光栅编码器安装误差引入的标准不确定度分量为:=5″
(3)光栅编码器示值误差引入的标准不确定度分量
光栅编码器示值误差为±5″,设其服从均匀分布,则引入的标准不确定度分量为:
(4)各个分量互不相关,则合成标准不确定度
(5)扩展不确定度: U=k×uc=2×5.9″≈12″(k=2)
4 结束语
对机电伺服扭矩测试系统而言,其测试数据的准确有效是实现其功能的基本要求,本文提出的机电伺服扭矩测试系统静态和动态溯源方式,可以有效实现对机电伺服扭矩测试系统扭矩参数的溯源保障,其静态和动态工况下扭矩参数的不确定度评定,可较好地识别系统使用风险,供各相关领域参考分析。
猜你喜欢
科海故事博览·下旬刊(2022年4期)2022-05-07
内燃机与配件(2022年2期)2022-01-17
智能建筑与工程机械(2021年6期)2021-09-10
科技创新导报(2021年33期)2021-04-17
汽车实用技术(2020年17期)2020-09-26
汽车世界·车辆工程技术(下)(2019年6期)2019-10-21
南方周末(2016-12-19)2016-12-19
科技视界(2016年18期)2016-11-03
科技视界(2016年21期)2016-10-17
科学与财富(2016年28期)2016-10-14