基于STM32的驱动转向系统设计*
2020-10-26 09:00曹天翔段要祖韩嘉兴张袁元
机电工程技术 2020年9期
程 凯,曹天翔,段要祖,韩嘉兴,张袁元
(南京工程学院,南京 211167)
0 引言
随着城市环境建设与规模的发展,人们的生活水平和质量都在不断提高。在移动互联网的风口下,安全、绿色、高效的出行理念是顺应时代发展所需要,在这其中,智能便携式代步工具呈现爆发式增长,成为人们的首选[1]。如美国赛格威公司所设计的“赛格威”平衡车建立了一种“动态稳定”的控制理论,以内置的精密固体陀螺仪来判断车身姿态,通过高速的中央处理器计算出适当的指令来驱动马达;江苏大学通过建立双轮毂电机驱动模型,设计差速与助力协调控制策略,并进行仿真分析得到合适的驱动转向模型[2]。这类代步工具的控制系统有的灵敏度过高,实际操作期间安全隐患较大;有的结构过于复杂,便携性达不到实际需要且不便于维修。
本文提出一种基于STM32 单片机的驱动转向系统模型。该设计采用双轮毂电机驱动,通过操纵者意识自由改变霍尔传感器输入电压的大小,将得到的信号通过单片机的运算与处理转化为不同的PWM值,进而改变输出车速的大小。该系统在保证足够安全稳定的同时,省去了大量复杂的传动结构,大大提高了整车结构的便携性,对未来新型代步工具的研发有一定借鉴意义。
1 硬件设计
硬件设计主要包含STM32f1 单片机开发板、轮毂电机驱动电路、操纵控制总成。其中轮毂电机由54.8 V 锂离子充电电池供电,其余两部分由12 V锂电池供电。硬件结构连接如图1所示。

图1 硬件结构连接图
1.1 STM32f1单片机开发板
STM32f1是新的基于ARM内核的32位高性能MCU。该单片机具有功能强、低电压、低功耗、外设多等优势[3],支持PWM输出、ADC转换、DMA传输等重要功能,为系统高效快速处理数据提供了有力保障,是该控制系统的核心。为了实现在复杂的实际路况下能够以最快的速度使驾驶者对车辆进行有效控制,系统采取DMA传输方式。
1.2 轮毂电机驱动电路
驱动连接图如图2所示。采用BLDC三相直流无刷无霍尔电机驱动板,该驱动板工作电压范围为36~72 V,额定功率约为700 W,结构轻便且不易损坏,具有过载保护、电流异常保护及堵转保护等功能[4]。其中VR为PWM输入端,通过PA6输入的PWM 波控制电机的转速;ZF 可以控制电机正反转。PC0=1时,电机正转;PC0=0时,电机反转,单片机与驱动板共地。IN1、IN2 分别为电源正、负极,OUT1、OUT2、OUT3分别为三相电机输出端。

图2 驱动连接图(左轮)

图3 操纵控制连线图
1.3 操纵控制总成
操纵控制总成分为调速控制模块与转向控制模块两个部分,电路连接如图3所示。
1.3.1 调速控制
系统调速采用霍尔转把,基于霍尔原理的磁效应传感器是当前市面上常见的一种传感器,广泛应用于接近开关、位置测量、转速测量、电流测量等设备[5]。在本系统中,IN1 接单片机3.3 V 电压,OUT1 为传感器输出的0~3.3 V 模拟电压与单片机PA0连接参与ADC转化,从而控制电机转速。
1.3.2 转向控制
左右电机的差速转向是通过操纵杆的转动来实现的。操纵杆下方装有转向轴结构,如图4所示,这种转向轴是一种新型的霍尔传感器,原理与大多数霍尔元件类似,主要应用于平衡车,属于通用配件[6]。其输出电压为0~3.3 V,至左向右转动输出电压线性增大。在该系统中,输出的电压值通过OUT2传至PA1实现系统转向信息的采集,及时调整左右电机速度差,实际控制如图5所示。
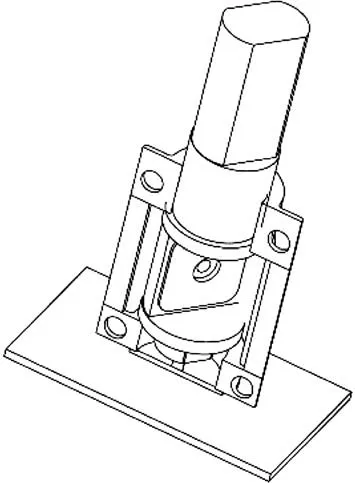
图4 转向控制结构

图5 转向控制原理
2 软件设计
2.1 总体结构
系统采用C 语言编写程序,系统软件设计主要包括系统主程序、系统初始化子程序、ADC 转换与DMA 传输子程序、系统主传递函数、PWM波子程序,系统程序流程如图6所示。
2.2 ADC转换与DMA传输程序
本系统采用双输入端向单片机输入数据,因此需开启STM32ADC的通道0与通道1(即PA0、PA1),并按要求将所需寄存器一一配置好。值得注意的是,单片机两个通道内的数据不可能同时输出,但系统要求两个输入参量必须同时参与主函数的运算,这就需要引入DMA传输方式。DMA即直接存储器访问(Direct Memory Access),是一种可以在没有CPU干预的情况下完成外部设备之间的数据传输,使CPU 能够专注于数据的计算,适度解决芯片内部数据处理能力不足的问题,保证了系统即时运算的快速性[7]。在系统中,通过配置DMA_Init()与DMA_DeInit()可以实现两种输入参量以极快的形式交替传输至单片机中参与ADC转换工作。由于传输速度极快,可以视为二者是同时从输入端输入至单片机中,保持车辆控制信息的准确性与快速性,提高了系统的灵敏度。
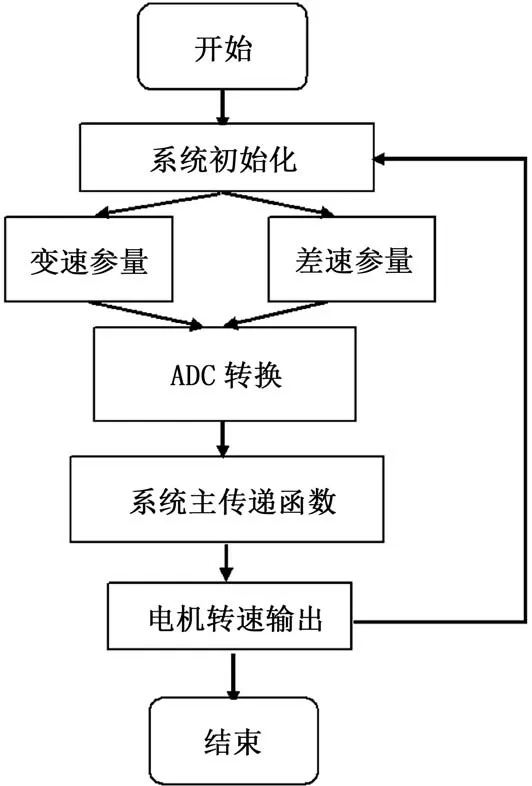
图6 系统软件总体布局
2.3 PWM波子程序
根据PWM 值改变占空比去调整电机转速的原理,PWM即脉冲宽度调制(Pulse Width Modulator),是指输出固定的周期信号,通过调整一个周期内工作周期的大小来控制输出功率的方法[8]。在PWM 驱动直流电机的系统过程中,通过改变轮毂电机上电枢的电压占空比来改变平均电压的大小,从而控制轮毂电机的平均速度。占空比大则电机转速大;占空比小则电机转速小。PWM 波形图如图7所示。

图7 PWM波形图
输出电压的平均值为:

式中:U0为PWM的输出电压;T为开关通断周期;t为开关接通时间;α为占空比。
由式可知,改变输出电压的占空比α就可以改变直流电机的平均速度,从而实现速度调节功能。
在该系统中,STM32ADC 转换电压为0~3.3 V,ADC 最大转换值4 096(212)。此时,设定PWM预装载值寄存器最大值为4 096,即转换后的数字量0 代表电压0,占空比也为0;数字量4 096代表电压3.3 V,占空比为100%。这样就实现了输入参量、ADC数字量、PWM占空比三者统一的控制。
2.4 系统主传递函数
设变速参量、差速参量经ADC 转换后的值分别为A、B,其中,A∈[0,4 096];B∈[0,4 096]。
根据实际情况,车辆在行驶过程中会面临以下两种情况:一是直线行驶的同步变速;二是转弯行驶的左右差速。根据这两种情况分别讨论。
2.4.1 直线行驶的同步变速
当车辆在直线行驶时,要求左右电机转速无差别或差别很小,即只要求A在系统中产生作用,通过改变A的大小来即时改变车辆行驶的速度大小。
2.4.2 转弯行驶的左右差速
当车辆在弯道行驶时,要求左右电机有一定的转速差以满足差速转弯的需要,此时,在A要发挥作用的同时,B也要产生作用,通过B 来改变左右车轮速度差的大小,进而改变车辆转弯半径的大小,实现弯道行驶。
满足以上两种行驶状态下的代码如下:
left=(A/x)× (B/b)+n
C=4 096-B
right=(A/x)×(C/b)+n
TIM_SetCompare1(TIM3,left)
TIM_SetCompare2(TIM3,right)
式中:b=2 038-2 058中任意值,n为调整参数。
注意:x 为比例系数,为防止最后总和超过4 096 而使数值溢出,要求x必须为大于1小于2的常数;为防止手抖等不确定因素导致车把有小角度的歪斜而影响直线行驶,要求b在2 048(即中间值)左右;x与n需根据实际车型通过多次模拟仿真以及实车测试得到。
在直行中,操纵者将转动杆置于中位即B=2 048,此时,(B/b)与(C/b)数值一致,左右电机速度相同,车辆保持直线行驶;当车辆即将左转时,操纵者将转向杆向左偏移,B<2 038 而C>2 058,导致左电机转速明显小于右电机转速,因此车辆向左转;当车辆即将右转时,操纵者将转向杆向右偏移,B>2 038 而C<2 058,导致右电机转速明显小于左电机转速,因此车辆向右转。
综上所述,该方程的设计符合实际操作需求。
3 结束语
本文提出的驱动转向系统以STM32 单片机为控制芯片,采用两路霍尔传感器为输入端,通过ADC转换后以DMA的传输方式在系统主传递函数中融合处理,将得到实时、可靠的PWM波驱动电机运作,可实现车辆的直行变速、左右转弯等操作。该系统的设计对未来新型代步工具的研发有一定借鉴意义。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
制造技术与机床(2017年10期)2017-11-28
童话王国·文学大师班(2017年6期)2017-07-10