机载卫通天线载波相位误差影响分析及补偿
2020-10-28 07:12张明军丁鹊鹊侯景华
无线电工程 2020年11期
张明军,丁鹊鹊,侯景华,赵 丽
(中国人民解放军63629部队,北京100162)
0 引言
机载卫通天线自跟踪接收机采用单脉冲跟踪体制,馈电系统产生的和模信号主要用于通信并作为跟踪系统的参考信号,差模信号作为跟踪的误差信号,其大小确定了目标偏离电轴多少,差信号与和信号的相位关系确定了目标的偏离电轴方向。自跟踪接收机根据误差电压的大小实时调整天线位置和姿态动态跟踪卫星,误差电压的正确与否直接关系到跟踪精度[1-3]。
自跟踪接收机由于测量飞机平台环境条件恶劣,和/差2路传输特性的差别和设备内部温度变化,以及飞行高度变化引起相位的温度变化,常导致载波和/差2路信号基准相位发生变化,相对相移会变化较大,产生了附加相移,进而产生了附加的误差电压,接收机输出的误差电压不能真实反映卫通天线的偏离角,引起跟踪误差,易导致天线丢星,特别是在飞机起飞、拐弯等航段。因而,必须对跟踪时载波的和差相位一致性进行准确地补偿和预置,才能保证跟踪系统的收敛特性,减少交叉耦合,提高跟踪精度[4]。
本文分析了载波相位误差对解调性能的影响,采用标定法和移相法对自跟踪接收机相位进行补偿,通过实时调整中频接收机的锁相环初始相位来消除附加相移,减小跟踪误差,提高天线跟踪精度,分析了中频接收机初始相位调整前后的交叉耦合变化情况,经过验证,改变跟踪接收机初始相位,可有效减少交叉耦合,提高天线跟星稳定性。
1 载波相位误差对解调性能的影响分析
从天线馈电系统得到的和信号UΣ与差信号UΔ为:
式中,Φ0为和差信号相位差;A为信号幅度;μθ为轴角编码器的角度与误差电压变换系数。
差信号UΔ经0/π调相(调制信号为角频率为Ω的方波信号)后的信号为:
cos[(ωs-kΩ)t+Φ0]}。
和差信号相加后经放大、变频、锁相后的信号为:
U=kAcosωrt+
cos[(ωr-Ω)t+Φ0]}。
利用互相正交的2个相干载波信号U1r=Ur·cosωrt和U2r=Ursinωrt对信号U鉴相,滤去其高频与直流成分,只选Ω分量后得:U1Ω=k′cos(Ωt+Φ0)和U2Ω=k′sin(Ωt+Φ0),将U1Ω,U2Ω与时钟基准信号进行同步检波,滤除其高频2Ωt分量,取其直流误差电压为:
UΔA=k″sinΦ0,
(1)
UΔE=k″cosΦ0,
(2)
将UΔA和UΔE送天线伺服系统即可实现对天线自动跟踪。
环境条件和飞机姿态变化时,引起和/差2路载波信号基准相位发生了变化,产生了附加相移。设差支路产生的附加相移为φ,此种情况下,和差信号相位差为Φ0+φ,则差信号为:
UΔ=Aμθcos(ωst+Φ0+φ)。
对差信号UΔ经0/π调相、和差信号相加后经放大、变频、锁相后的信号为:
Uφ=kAcosωrt+
cos[(ωr-Ω)t+Φ0+φ]}。
对信号Uφ进行正交鉴相、同步检波、滤波后,取其直流误差电压为:
UΔΑφ=k″sin(Φ0+φ)=
k″[sinΦ0cosφ+cosΦ0sinφ],
(3)
UΔEφ=k″cos(Φ0+φ)=
k″[cosΦ0cosφ-sinΦ0sinφ] 。
(4)
对比式(1)~式(4)可以看出,由于附加相移φ的存在,跟踪接收机解调出来的方位和俯仰直流误差电压发生了变化,产生了附加误差电压。
方位附加误差电压为:
ΔUΔA=UΔAφ-UΔA=
k″sinΦ0(cosφ-1)+k"cosΦ0sinφ。
俯仰附加误差电压为:
ΔUΔE=UΔEφ-UΔE=
k″cosΦ0(cosφ-1)-k"sinΦ0sinφ。
载波相位误差对解调性能的主要影响有:
① 由于cosφ的存在,使鉴相后的调制信号的信噪比下降了cos2φ倍,提高了误码率。
② 在对调制信号进行解调时,附加相移产生了附加误差电压,当带有附加误差电压的直流误差电压控制天线运动时,会使天线产生指向误差,影响天线跟踪精度。
③ 在式(3)和式(4)中,第二项是与原调制信号正交的项,该正交项使调制信号产生畸变,产生了交叉耦合,φ越大,畸变也越大,交叉耦合越大,收敛性能变差。由于交叉耦合的存在,天线不能稳定跟踪卫星,降低了天线跟踪精度。
方位交叉耦合:
俯仰交叉耦合:
若要改变附加相移对接收机解调出来的直流误差电压的影响,可采用载波相位补偿方法改变相干载波的初始相位,消除附加相移φ的影响。在设计中,可通过实时改变中频接收机的锁相环初始相位来实现相位补偿,以消除附加相移[5]。
2 载波相位补偿方法
2.1 标定法
标定的主要目的是修正天线在使用过程中和差通道幅相发生的变化。为了进行标定,需要在跟踪接收机内加装一个标定系统,利用该标定系统实时测量和通道与差通道的实测相位差Φ1,与存储在跟踪接收机EPROM内的和差通道基准相位差Φ0进行比较计算,得到和差通道的基准相位差与实测相位差的差值,该相位差即为附加相移φ,在跟踪接收机内对该附加相移进行补偿,减少附加误差电压,实现对天线的高精度跟踪[6]。
2.1.1 标定系统设计
标定系统主要由基准信号源(如70 MHz)、上变频模块、信号处理模块及和差通道切换开关[7-9]等组成。
基准信号源产生标定用的70 MHz基准信号。设计中也可直接使用跟踪接收机内部的70 MHz基准信号。上变频模块主要产生Ku频段标定激励信号,将70 MHz基准信号上变频为工作频率(如12.5 GHz射频信号)。信号处理模块将收到的70 MHz中频信号与70 MHz基准信号进行变频、AD采样、鉴相等处理,计算和通道相位值、差通道相位值和2路信号的相位差。
在中频信号处理中,可采用DSP和FPGA融合设计技术,提高信号处理速度。FPGA主要完成数字下变频、快速傅里叶变换、数字锁相和计算[10-12],DSP主要完成误差信号的同步解调、低通滤波和AGC控制功能。和差通道切换开关安装在天线系统的馈源与LNA之间,在天线控制单元(ACU)控制下,和差通道切换开关分别将70 MHz基准信号输入到天线的和通道与差通道中。
标定系统的70 MHz基准信号源、上变频模块、信号处理模块安装在卫通站的跟踪接收机内。将跟踪接收机测试口输出的70 MHz信号作为标定用的载波输出信号,输入到标定系统的信号处理模块。标定系统组成与连接方法如图1所示。
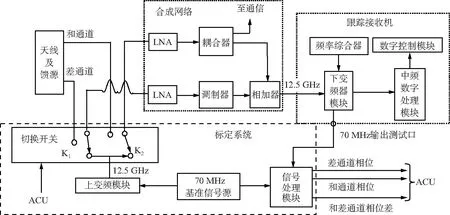
图1 标定系统组成与连接方法Fig.1 The composition and connection method of the calibration system
2.1.2 工作原理
标定系统的70 MHz基准信号变频后产生12.5 GHz射频信号,在ACU控制下,依次打开切换开关K1和K2,将12.5 GHz射频信号输入到天线的和通道与差通道中。
在跟踪接收机的“70 MHz输出测试口”分别将2路70 MHz中频信号输入到标定系统的信号处理模块,经过变频、AD采样、鉴相等处理,计算70 MHz基准信号与70 MHz输出信号的和通道相位值、差通道相位值与和差信号相位差,并将计算结果输入到ACU,对附加相移进行补偿,减少附加误差电压和交叉耦合,实现对天线的高精度跟踪。在天线装机出厂时,利用标定系统(或暗室)得到和差2个通道的出厂相位差(基准相位差)Φ0=φ∑-φΔ作为天线和差通道的基准相位差,存储于跟踪接收机的EPROM内。
在天线使用过程中,每次开机先将基准相位差Φ0从EPROM加载到FPGA内部的RAM当中。在线实时标定时,将测得的实时和差相位φ1,φ2作为实测值也写入到RAM当中,经过RAM读写控制,一次并行读出。在信号处理模块中,计算出和通道与差通道实测相位差Φ1=φ1-φ2,相差φ=Φ0-Φ1,即为附加相移,将计算结果φ输入到ACU单元,作为跟踪接收机和差通道最终补偿相位。在线实时标定时,和差通道相差计算流程如图2所示。
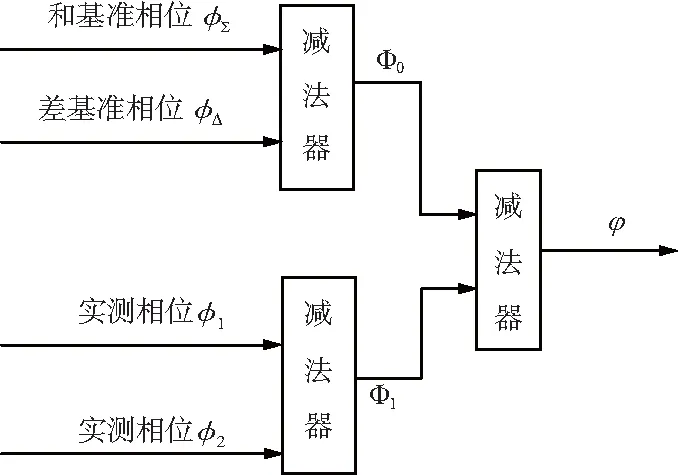
图2 和差通道相差计算流程Fig.2 Difference calculation procedure of sum-difference channel
2.2 移相法
2.2.1 相位补偿方法
设跟踪接收机相干载波的初始相位角为φ,则2路相互正交的相干载波的初始相位角也为φ。2路相互正交的相干载波信号为[13-15]:
U1rφ=Urcos(ωrt+φ),
(5)
U2rφ=Ursin(ωrt+φ) 。
(6)
利用式(5)和式(6)对信号Uφ鉴相(Uφ分别与U1rφ和U2rφ相乘),并滤去高频与直流成分,则:
U1Ωφ=M1cosφ+M2{cos[(Ωt+Φ0)+(φ-φ)]+
cos[(-Ωt+Φ0)+(φ-φ)]},
U2Ωφ=M1sinφ+M2{sin[(Ωt+Φ0)+(φ-φ)]-
sin[(Ωt-Φ0)+(φ-φ)]}。
只选其Ω分量后得:
U1Ωφ=M{cos[(Ωt+Φ0)+(φ-φ)]+
cos[(-Ωt+Φ0)+(φ-φ)]},
U2Ωφ=M{sin[(Ωt+Φ0)+(φ-φ)]-
sin[(Ωt-Φ0)+(φ-φ)]}。
分别将U1Ωφ与U2Ωφ与时钟基准信号进行同步检波即(cosΩt)×(U1Ωφ)与(sinΩt)×(U2Ωφ),滤除去其高频2Ωt分量,取其直流的误差电压为:
UΔAφ=M′cos(Φ0+φ-φ),
UΔEφ=M′sin(Φ0+φ-φ)。
将UΔAφ和UΔEφ送至伺服系统控制天线运动时,就会产生指向误差。调整跟踪接收机的初始相位φ,当φ=φ时,即可消除附加相移φ对误差电压的影响,消除指向误差,实现卫通天线对卫星的连续、稳定的自动跟踪。
在跟踪接收机的中频跟踪解调电路中增加中频相移器,根据方位角误差和俯仰角误差的收敛性和交叉耦合大小,通过手动方式调整中频移相器相位值,改变中频接收机的锁相环初始相位φ,减小初始相位φ与附加相移φ间的差值,实时对接收机相位进行补偿。
中频移相器相位值的调整会引起交叉耦合的变化,因此,在中频移相器相位值调整时,应实时考虑方位、俯仰的交叉耦合大小和天线的收敛特性。
中频移相器初始相位角调整。接收机环路锁定后,对于卫星的信标信号,在跟踪接收机监控单元中,根据方位角误差和俯仰角误差的收敛性和交叉耦合大小,以手动方式调整锁相环初始相位值,实时对接收机相位进行补偿,使各轴交叉耦合尽量趋近最小。根据工程经验,当方位交叉耦合LA=(ΔUE/ΔUA)≤1/3和俯仰交叉耦合LE=(ΔUA/ΔUE)≤1/3时,所得相位值是符合要求的相位值,此时,自跟踪接收机能够正常跟踪卫星,不易丢星。
2.2.2 应用效果分析
以某机载卫通跟踪接收机为例,跟踪接收机锁定后,对接收机中频相位值调整前后的交叉耦合性能进行实例分析。
(1)跟踪接收机初始相位角为28°
在跟踪接收机角误差电压动态显示界面上,分别沿UA轴和UE轴上、下、左、右将相位各拉偏0.5°,1.0°和1.5°,得到误差电压ΔUA和ΔUE,计算误差电压对应的交叉耦合LA或LE。当沿UA轴将相位上下拉偏时,LE=(ΔUA/ΔUE),当沿UE轴将相位左右拉偏时,LA=(ΔUE/ΔUA)。
当中频接收机相位角为28°时,误差电压与交叉耦合关系如表1所示。
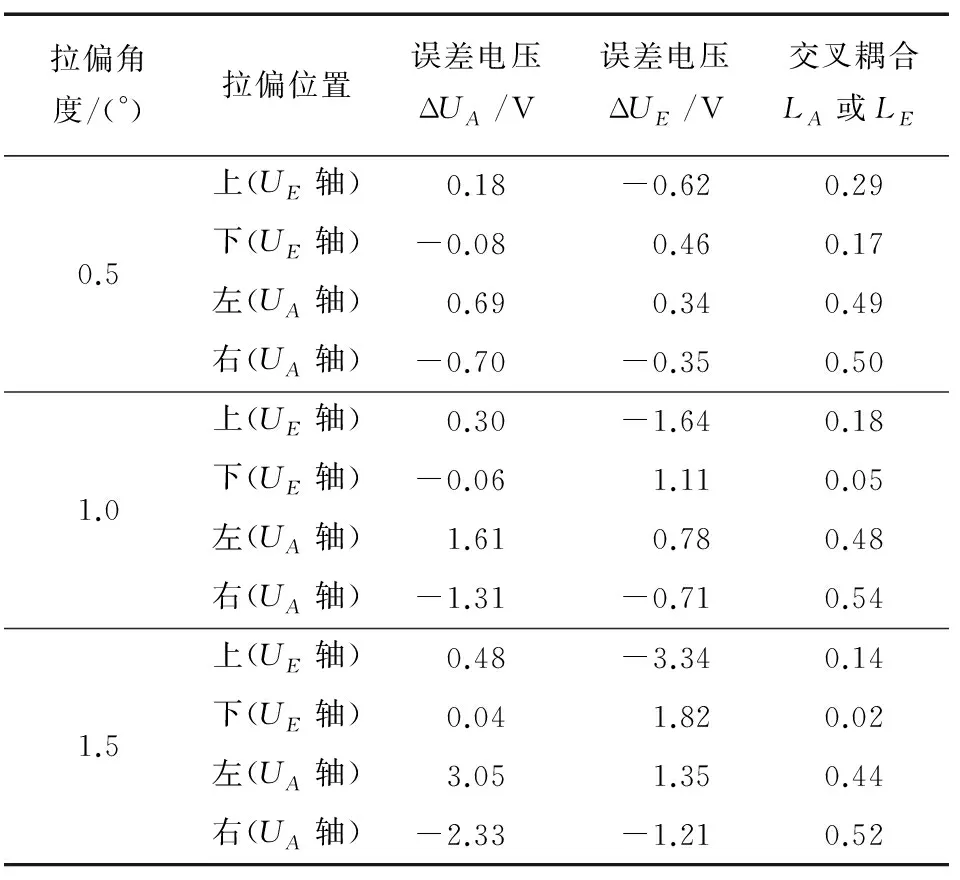
表1 跟踪接收机中频相位角为28°时误差电压与交叉耦合关系
跟踪接收机误差电压动态分布如图3所示。
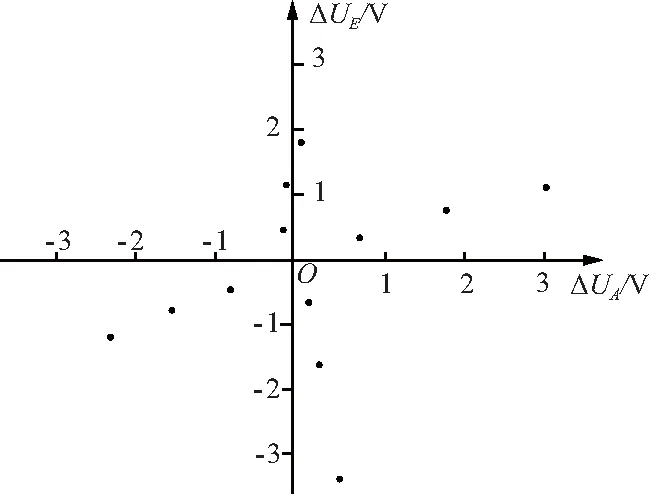
图3 中频相位角为28°时跟踪接收机误差电压动态分布Fig.3 The dynamic distribution of tracking receiver’s error voltage when intermediate frequency phase angle is 28°
在图3中,横轴ΔUA表示卫星偏离天线电轴的方位误差电压,纵轴ΔUE表示卫星偏离天线电轴的俯仰误差电压。横轴和纵轴的交点O表示天线电轴中心点,图中的各点表示卫星在天线电轴中的相对位置。
由图3可以看出,向上、向下拉偏相位时,6个位置的误差电压都靠近数轴,误差电压小,天线收敛性好,交叉耦合数值较小,符合小于1/3的要求。在左右方向拉偏相位时,6个位置的误差电压离轴较远,误差电压较大,交叉耦合值不满足小于1/3的要求,方位误差收敛性能差,存在发散现象,跟踪卫星过程中易丢星,需要进行相位值调整。
(2)中频接收机相位角由28°调整为2.8°
中频接收机相位角由28°调整为2.8°,再次进行交叉耦合检查。中频接收机相位角为2.8°时,误差电压与交叉耦合关系如表2所示。
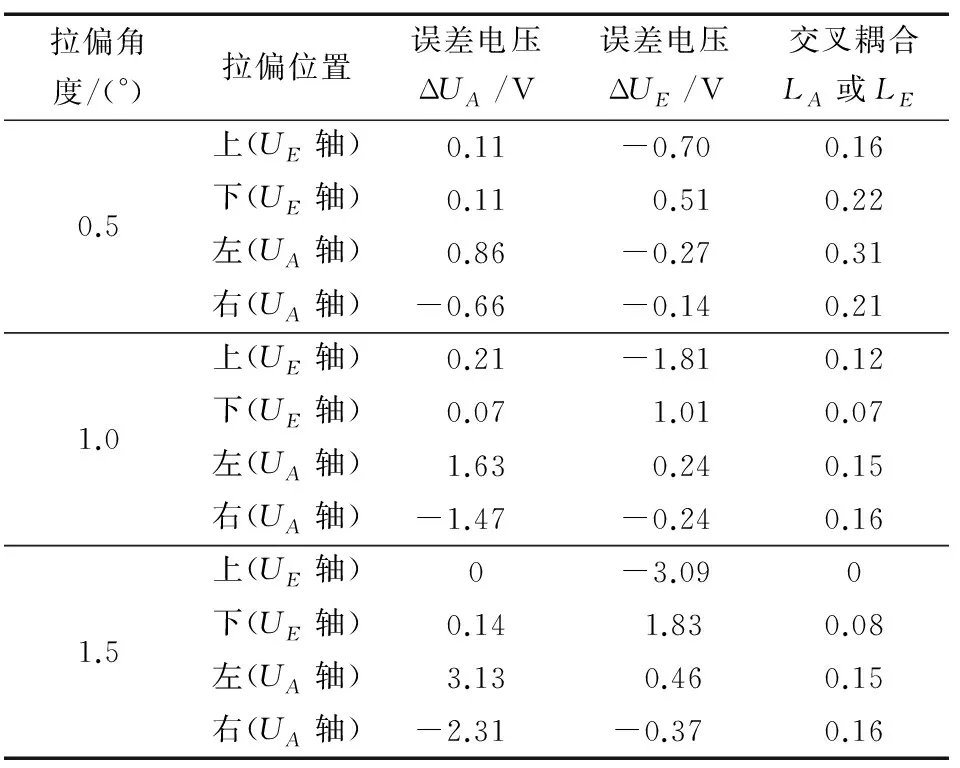
表2 跟踪接收机中频相位角为2.8°时误差电压与交叉耦合关系
跟踪接收机误差电压动态显示如图4所示。
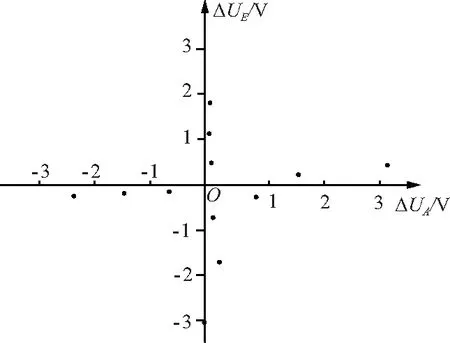
图4 中频接收机相位角为2.8°时跟踪接收机 误差电压动态分布Fig.4 The dynamic distribution of tracking receiver’s error voltage when intermediate frequency phase angle is 2.8°
由图4可以看出,中频接收机相位角由28°调整为2.8°后,当向上、向下、向左、向右拉偏相位时,各个位置的误差电压更靠近数轴,交叉耦合更小,天线收敛性好,交叉耦合值均满足小于1/3的要求,天线能稳定跟踪卫星。
3 结束语
本文提出的相位误差补偿方法可有效解决由和差通道相位误差引起的天线跟踪误差,提高天线跟踪精度,实现方案简单、实用效果好,应用范围大。在实际应用中,相位误差补偿可在卫通天线控制单元进行补偿,也可在卫通站监控单元进行补偿。移相法已在机载卫通天线中得到了验证,例如,在飞机起飞前,在地面通过天线控制单元调整接收机初始相位,减少天线交叉耦合,使交叉耦合值优于1/4,相位调整后,在飞机沿航路飞行中,天线跟星稳定,在飞机转弯阶段天线丢星次数明显减少。除应用于机载卫通站外,2种补偿方法均可用于车载和船载等其他机动平台。标定法也可直接应用于卫通相控阵天线和雷达相控阵天线的有源射频通道校准,通过建立标定系统,检查各有源通道的幅度、相位变化,判断各通道工作状态,并对其进行实时补偿。为避免此类问题的产生,在单脉冲自跟踪接收机设计中,建议增加相位校准功能,可实时对和差通道相位误差进行自动校准 。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
军民两用技术与产品(2022年7期)2022-08-06
护理研究(2022年8期)2022-05-19
导航定位学报(2022年1期)2022-02-17
电子制作(2019年24期)2019-02-23
雷达学报(2018年5期)2018-12-05
电子制作(2018年19期)2018-11-14
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
北京航空航天大学学报(2017年10期)2017-04-20