5G系统中基于三阶相关的同步算法及FPGA实现
2020-10-28 02:19李贵勇张翰卿王永航
光通信研究 2020年5期
李贵勇,张翰卿,王永航
(重庆邮电大学 通信与信息工程学院,重庆 400065)
0 引 言
5G用户设备(User Equipment,UE)开机后的第一步是小区搜索过程[1]。UE通过检测主同步信号(Primary Synchronization Signal,PSS)和辅同步信号(Secondary Synchronization Signal,SSS)得到物理小区标识(Physical Cell Identifier,PCI)和时频同步,并在进行信号均衡后解析物理广播信道(Physical Broadcast Channel,PBCH),获得主系统信息(Master Information Block,MIB)。
检测同步信号的过程,尤其是同步点的准确与否对于性能的影响极大。循环前缀(Cyclic Prefix,CP)技术允许同步点可以有一定程度的向前偏移,但是其造成的相位偏移在后续过程中很难通过算法来弥补,对于接下来的信道处理过程有很大影响。而同步点向后偏移造成的数据丢失则完全无法消除。
因此,本文将着眼于检测同步点的性能。文献[2]介绍了使用最广泛的时域互相关算法,将接收时域信号与本地生成的PSS时域序列进行相关;文献[3]提出了一种时域自相关算法,利用PSS时域序列的共轭对称性计算同步点;文献[4-5]提出了一种分段互相关算法,将接收信号分段相关,以降低频偏累加造成的影响;文献[6]利用现场可编程门阵列(Field Programmable Gate Array,FPGA)的并行策略实现了下行同步算法。
本文基于m序列的三阶自相关特性,提出了一种新型的定时同步检测FPGA算法,有望在低信噪比环境下提高同步过程中同步点的准确性,并通过Matlab和SE14.7等软件搭建了仿真链路,以验证算法的复杂度与可行性。
1 5G下行同步过程
下行同步是小区搜索过程的第一步。UE按照全球同步栅格(Global Synchronization Channel Number,GSCN)对应的频段搜索同步广播块(Synchronization Signal/PBCH Block,SSB)中的PSS和SSS。
图1所示为5G系统下行同步过程,下行同步首先检测PSS。UE通过对接收到的信号采用降采样等方法进行处理,粗略地检测PSS存在的大概位置,此过程称为粗同步过程,检测的PSS粗略位置称为粗同步点。以粗同步点为基准,检测出准确的PSS时域序列位置的过程称为精同步过程,得到的PSS时域序列起始点称为精同步点[7]。

图1 5G系统下行同步过程
此外,UE在与基站建立连接后,由于时钟精确度和信号处理时延等问题,下行同步过程中建立的同步可能会逐渐偏离正确的同步点。为此,UE需要每隔一段时间重新计算同步点,此过程称为同步跟踪过程。
不同于4G中使用的Zadoff-Chu(ZC)序列,5G系统中PSS使用m序列,原因在于在存在时偏和频偏的情况下,ZC序列的相关函数存在较大的旁瓣,会影响检测性能[8]。令一个m序列为x(i),则其三阶自相关函数为
式中:Cm为三阶相关值;i为离散序列相位;L为离散序列长度;p和q均为离散序列相对相位[9-10]。
根据m序列的移位相加特性,存在p和q,使得对任意i,有x(i-p)x(i+q)=x(i),则根据m序列的性质,此时序列的三阶相关函数Cm出现峰值Cm(p,q)=1。对于其他的i、p和q组合,有x(i-p)x(i+q)≠x(i),此时Cm(p,q)=-1/L,即m序列的三阶相关函数为
对于5G系统中PSS使用的m序列,其三阶相关函数峰值位置如表1所示。

表1 5G PSS三阶相关函数峰值位置
2 基于PSS三阶相关特性的同步算法
传统的PSS同步算法有时域互相关和时域自相关算法。
令接收信号为a(t)+n(t),t为模拟信号相位,a(t)为有用信号,在本文中特指时域同步序列,n(t)为白噪声。若使用互相关方法,本地生成a(t)信号,并与接收信号进行互相关,则互相关值为
式中:v为未知相位,进行滑动相关时会变化,乘法代表序列相关运算。当n(t)的幅度较大时,有用部分a(t+v)a(t)可能会淹没在干扰部分a(t+v)n(t)中,造成性能损失。由此可知,互相关算法的抗干扰性能较差。
时域自相关算法是将当前接收信号与一个SSB检测周期后的接收信号进行相关,如果出现相关峰值,则认为该位置为PSS。此算法中若接收噪声为理想白噪声,则认为两个时刻的噪声没有相关性,相关值受噪声影响小。故自相关算法比互相关算法具有更加优秀的抗干扰性能。
虽然时域自相关算法理论上可行,但该算法需要储存一个SSB检测周期内的所有数据(文献[11]规定,如果UE没有配置,默认检测周期为20 ms),所需空间资源极大,并且SSS与PSS有同样的自相关峰值特性,算法无法确定此位置究竟是PSS还是SSS。
本文基于PSS使用的m序列的三阶相关性质,提出一种可在精同步过程和同步跟踪过程中使用的新型同步算法。
对接收信号进行三阶相关,其相关值为
由于n(t)为白噪声,我们认为n(t)、n(t-p)和n(t+q)之间没有相关性,或相关性极小。a(t)为m序列,根据m序列的性质a(t)a(t+v)当且仅当v=0时有极大值,故在理想情况下式(4)仅剩下有用部分a(t)a(t-p)a(t+q),相比于式(3),有用部分的抗干扰性能更强。当然实际噪声不是理想白噪声,当噪声幅值足够大时,依旧会影响到有用部分的检测。
同时,三阶相关计算不需要其他时刻的信号。因此,此方法既可以使用自相关抵抗白噪声的干扰,又避免了时域自相关需要消耗大量空间和时间资源的问题。
算法具体流程如下:
令一段接收信号为s(t),已经进行降采样使得一个正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)符号中采样点数为2 048点,并且已经下变频使得PSS所在的频域位置位于接收信号中频。
步骤1:假设粗同步过程计算出的同步点为s(v),v为粗同步点在接收序列中的位置,计算粗同步点时的精确度为±16点。则UE认为s(v-15)、s(v-14)、…、s(v+16)中存在精同步点。
取[s(v-15)、s(v-14)、…、s(v+2 032)]、[s(v-14)、s(v-13)、…、s(v+2 033)]、…、[s(v+16)、s(v+17)、…、s(v+2 063)]这32段序列,分别作快速傅里叶变换(Fast Fourier Transform,FFT),得到32组2048点频域序列。
步骤2:分别从这32组序列中取PSS所在位置的127点:
式中:PSSk为从频域序列中取得的32组PSS;wk(n)为步骤1中得到的32组频域序列。
步骤3:对这些序列进行三阶相关,得到
式中,Ck(p,q)为序列的三阶相关函数。
PSS三阶相关的峰值位置如表1所示。这里任取一理论峰值位置,如(p=3,q=4)处,则认为这32个相关值中的最大值Ck(3,4)对应的PSSk即为准确的PSS,其对应时域序列的起始点即为精确的定时同步点。
上述过程针对下行精同步过程,如果应用在同步跟踪过程中,只需要将步骤1中的粗同步点替换成现有的同步点即可。
3 仿真验证
使用Matlab软件搭建仿真链路。首先测试精同步过程中算法的性能。信道模型使用加性高斯白噪声(Additive White Gaussian Noise,AWGN)信道。令一个OFDM符号采样点数为2 048, PSS占据频域中心的127个点。粗同步过程的精确度为±16点,具体仿真参数配置,如表2所示。

表2 精同步过程仿真参数配置
作为对比,仿真还测试了文献[2]中提供的传统时域互相关算法和文献[3]中提供的基于CP共轭对称性的精同步算法。每种算法仿真1 000次,记录检测出正确同步点的次数并计算正确率。图2所示为3种算法在不同信噪比下正确率的对比。

图2 下行同步算法检测同步点的正确率
由图可知,如第2节所述,传统时域互相关算法在抗噪声方面能力有限,当信噪比下降至2 dB左右时,时域互相关算法已经无法保证100%的正确率;信噪比继续下降至2 dB左右时,时域互相关算法开始出现检测错误的情况,而基于CP共轭对称性的精同步算法和基于三阶相关的算法仍然保持着100%的正确率;当信噪比低至-7 dB后,三阶相关算法检测正确率相比时域互相关算法高出32%,比基于CP共轭对称性的精同步算法的正确率高出27%。
接下来测试算法在同步跟踪时的性能,信道和帧结构参数配置与精同步过程相同。如果信号接收模块的时钟精度足够高,则跟踪算法只需要1帧或两帧运行一次,就可以保证每次同步点的偏移不会很多。仿真中设置最大偏移量为5个点,即算法只计算当前同步点左右各5个点的相关值,而不是精同步过程中的左右各16个点。
作为对比,仿真测试了时域互相关算法和文献[12]提出的基于参考信号时域信道脉冲响应的同步跟踪算法,该算法用参考信号信道脉冲响应的幅值进行定时同步。图3所示为3种算法检测正确率的对比。

图3 同步跟踪算法检测同步点的正确率
三阶相关算法在同步跟踪过程中的性能与下行同步过程类似。而时域互相关算法由于限制了同步点的偏移量,检测正确的概率略有提高,但在低信噪比环境下仍然性能不佳。参考信号的发送功率一般比同步信号的发送功率高,所以基于参考信号时域信道脉冲响应的同步跟踪算法在3种算法中性能最好。当信噪比降低至-7 dB时,三阶相关算法检测正确率相比基于参考信号的算法低2%。
4 FPGA实现
本文使用ISE14.7软件编写了Verilog代码。采用xc7vx690t-1ffg1158作为FPGA芯片。FFT和乘法器模块均使用ISE14.7软件自带的ip核。图4所示为顶层寄存器转换级电路图。图中,Rx_data_r为输入的接收信号;Acc_syn_clk为时钟;adder_number为粗同步过程精确度;MAU_1_path_start为相关模块开始标志;Rst_n为复位信号;fft_2 048为2 048点FFT模块;MAU为相关计算模块;Acc_syn_cmp为相关值比较模块。
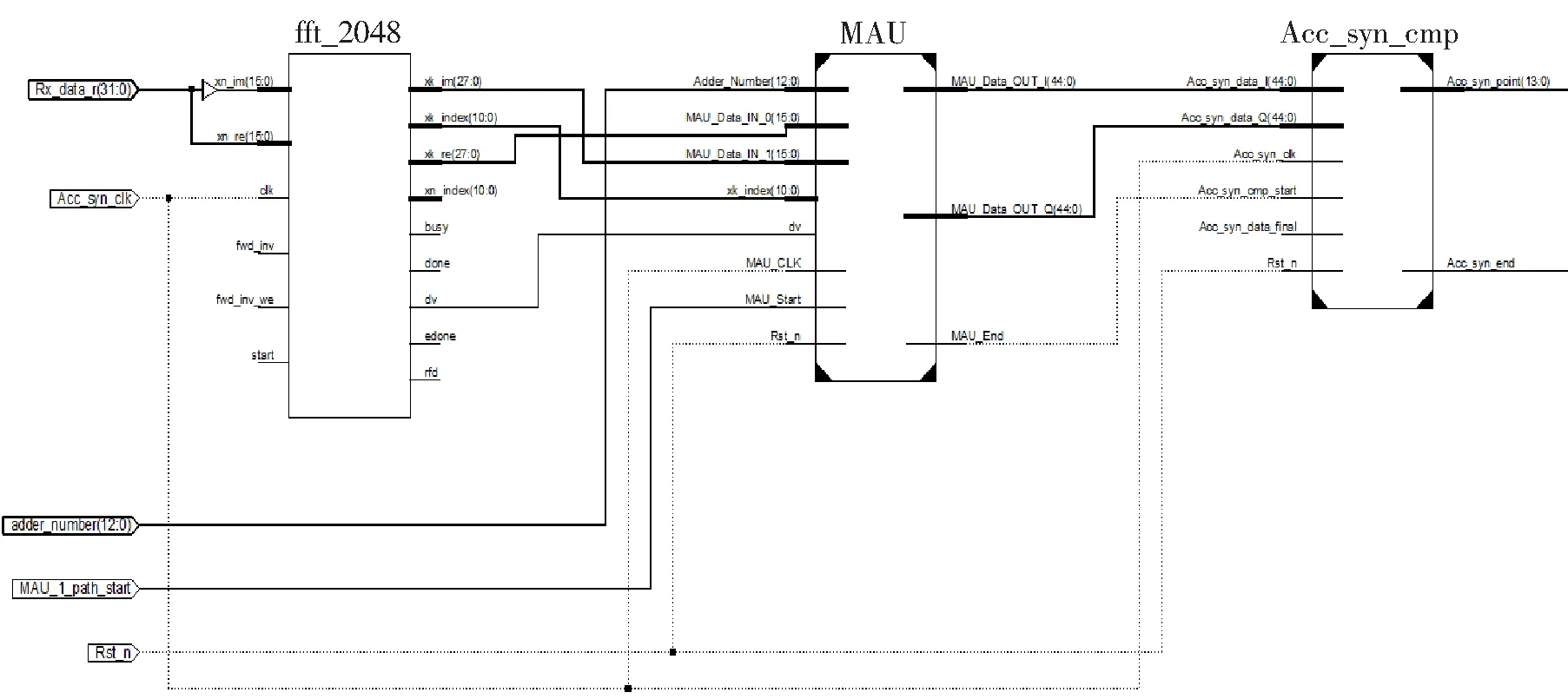
图4 FPGA代码寄存器转换级电路图
精同步过程开始后,分别将32组接收信号送至FFT模块进行时频域转换,然后将频域信号送至MAU模块进行三阶相关,最后将相关值送入Acc_syn_cmp模块进行比较,返回相关值最大的同步点为精同步点。
使用Matlab软件粗同步后的数据作为模块输入,验证FPGA算法。图5所示为FPGA代码和Matlab软件代码运行正确率比较。由于FPGA使用的定点数相比于Matlab软件使用的浮点数损失了小数部分的精度,故偶尔会存在Matlab代码检测正确而FPGA代码检测错误的情况,但整体上两者性能相同。
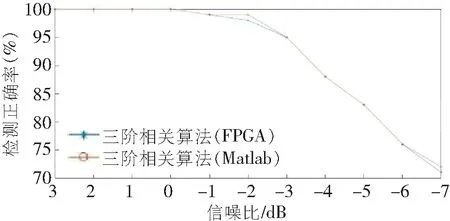
图5 软硬件代码性能比较
表3所示为三阶相关算法使用FPGA实现时占用的硬件资源。本算法的实现除了最基本的信号存储之外,需要1个FFT模块和1个127点相关模块,复数乘法1次需要4次乘法,则127点相关可以使用128×4/N个乘法器,其中N为正整数,可以根据需要调整。本文使用4个乘法器,另外还有两个乘法器实现复数求模,共6个乘法器。

表3 算法占用FPGA资源
表4所示为三阶相关算法和其他算法需要的模块数目比较。

表4 各种算法使用模块数
考虑到FPGA的模块复用机制,下行同步除了检测PSS还需要检测SSS,而检测SSS的过程一般在频域进行[13],同步跟踪过程运行时信号已经从时域变换为频域,所以无论如何都需要1个FFT模块。这个模块考虑到,三阶相关算法、时域互相关算法和基于CP的精同步算法的资源消耗仅在于相关模块使用的乘法器数量。但基于参考信号的跟踪算法仍然需要额外的快速傅里叶逆变换(Inverse Fast Fourier Transform, ITTF)模块。
时间资源上,FFT所需时钟周期取决于设置,以本文配置的Pipelined, Streaming I/O、2 048点FFT为例,这种配置下,一次FFT需要6 265个时钟周期。相关过程需要的时钟周期取决于乘法器的数量,本文使用4个乘法器,则相关过程需要128个时钟周期,本文的算法需要204 576个时钟周期。
文献[11]规定SSB最低发送周期为5 ms,即理论上精同步过程和同步跟踪过程最快也要5 ms才运行一次,实际项目中假设同步模块的时钟频率为153.6 MHz (30.72 MHz×4), 5 ms总共有768 000个时钟,远远高于算法运行时间,故算法的时间复杂度是可以接受的。
实际情况中,按照5G系统的流程,下行同步过程只要正确检测出PCI即停止运行,不再需要运行算法。同步跟踪过程也不需要每5 ms运行一次同步算法,每1帧或两帧运行一次算法即可保持良好的同步性能。算法时间复杂度的影响将进一步减少。
5 结束语
本文根据m序列的三阶相关特性,提出了一种基于三阶相关的定时同步算法。仿真结果表明,相比于传统的下行精同步算法,三阶相关的定时同步算法可以在不使用更多空间资源的同时,具有良好的抗白噪声性能,而在实际应用中算法时间消耗的提升可以忽略。当信噪比下降至-7 dB时,三阶相关的定时同步算法与传统下行精同步算法相比,检测同步点的准确率提高了20%~30%。而在同步跟踪过程中,本算法的性能相比使用参考信号的算法低5%以内,但使用资源方面少用了1个IFFT模块。
但是三阶相关同步算法是精同步算法,当其应用在下行同步过程中时,非常依赖粗同步算法的性能。如果粗同步算法无法定位到准确同步点附近,UE在同步失败后会反复运行下行同步过程,此时本算法时间消耗的增加可能会导致整体同步过程时间延长。
猜你喜欢
数学物理学报(2022年2期)2022-04-26
中华养生保健(2020年7期)2020-11-16
军事运筹与系统工程(2019年4期)2019-09-11
中国港湾建设(2017年11期)2017-12-19
北京航空航天大学学报(2017年4期)2017-11-23
中学生数理化·七年级数学人教版(2017年2期)2017-03-25
家教世界·创新阅读(2016年11期)2016-12-27
天津护理(2016年3期)2016-12-01
故事会(2016年15期)2016-08-23
系统工程与电子技术(2016年7期)2016-08-21