无人机助推起飞过程影响因素敏感度分析
2020-11-05 02:42王晓东
兵器装备工程学报 2020年10期
姚 琳,王晓东
(南京模拟技术研究所, 南京 210016)
小型固定翼无人机具有成本低、使用灵活、功能多样、不存在人员安全因素等优势而越来越受到世界各国重视,并在军、民用领域得到广泛使用[1-3]。小型固定翼无人机的起飞方式有很多,如弹射起飞、滑跑起飞、垂直起飞以及火箭助推起飞等。无人机使用火箭助推起飞,属于零长起飞方式,具有便捷、快速,对起飞场地无严格要求,被作为野战环境条件下使用的重要起飞方式[4]。
无人机采用火箭助推起飞的过程中,其动态响应受到的影响因素较多,包括吊挂偏差、风载荷、起飞架扰动、燃油晃动、推力座变形等[5]。但在结构设计合理的前提下,吊挂偏差和风载荷成为影响无人机起飞安全性的主要因素。
对于不同的无人机起飞动态响应评价参量,每个因素的影响程度存在较大差异。这时就需要明确不同影响因素对不同动态响应的影响程度大小,以便于在设计生产过程中,对有较大影响的参数加以严格控制,对于另外一些影响较小的参数则不必有太多约束,以降低设计生产成本和使用复杂程度。
本文以火箭助飞固定翼无人机为研究对象,采用联合仿真方法,实现了该型无人机风载荷作用下的受控起飞仿真分析。选择最小俯仰角、最大俯仰角、最大侧倾角、最大偏航角和3 s时刻高度作为无人机起飞动态响应评价参量,选择助推火箭安装角纵向偏差、火箭安装角横向偏差和侧风3个因素为分析变量,采用优化拉丁超立方设计方法产生了样本空间,仿真计算了对应样本下的无人机起飞过程动态响应,采用径向基(RBF)神经网络方法,建立了起飞段近似模型,采用多元二次回归方法,对影响因素进行了敏感度分析。获得了起飞动态响应评价参量对不同影响因素的敏感度。研究结果可为无人机的研制提供参考。
1 无人机助推器起飞动力学模型建立
无人机火箭助推起飞系统主要包括发射架、无人机和助推火箭3个部分。无人机机身前方有2个支撑轴约束在翻转架上,后下方有一个支撑,约束在支撑导轨内,无人机下方后端装有助推火箭。发射架主要由架体、翻转架、后支撑、闭锁销等组成,结构示意图如图1所示。
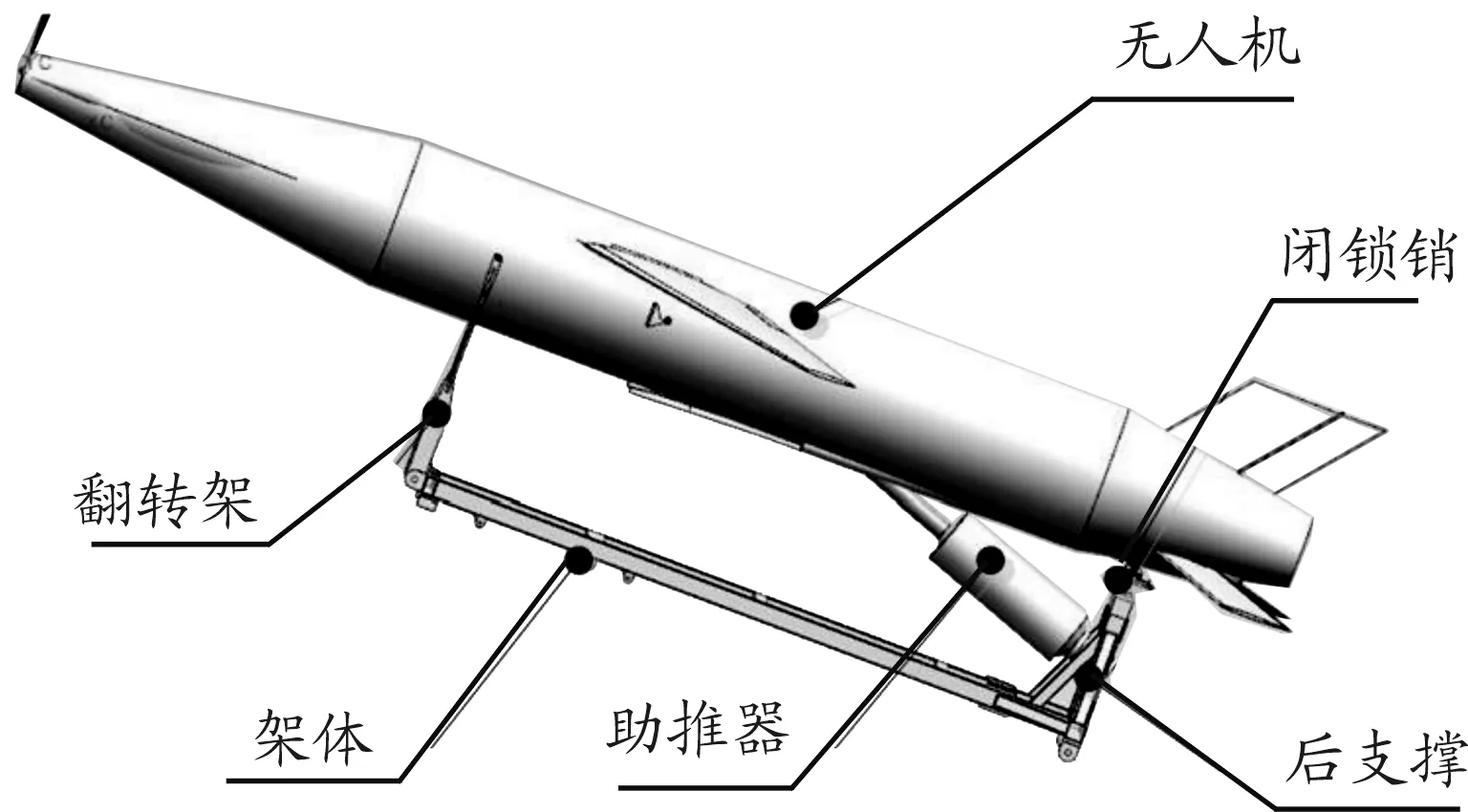
图1 无人机火箭助推系统结构示意图
将无人机火箭助推起飞系统三维模型导入ADAMS中,并对质量特性、约束特性以及在和、、载荷特性进行添加,最后建立了无人机的起飞动力学模型。
在起飞动力学模型中,建立无人机的机机体坐标系。机机体坐标系定义为:以无人机重心为原点,X轴沿机身向前指向机头原点,以水平向右方向为Y轴,根据右手笛卡尔坐标系建立Z轴。本文有关无人机起飞过程的姿态变化,均是基于机体坐标系来研究。
在无人机起飞阶段,需要对无人机的俯仰和侧倾姿态进行控制,以确保安全起飞。本文设定起飞过程俯仰角控制目标值为15°,侧倾角控制目标值为0°。
基于联合仿真方法,建立基于MATLAB/ADAMDS的无人机起飞联合仿真模型。该联合仿真模型包含起飞动力学模块与飞控系统模块。
联合仿真原理:
1) 在ADAMS中,通过传感器测量无人机的6个姿态量:3个姿态角(俯仰、侧倾、偏航)、速度、加速度和高度,并将其创建为输出状态变量,提供给MATLAB控制策略模型实时调用;
2) 在ADAMS中,将3个等效气动力、3个等效气动力矩定义为输入状态变量,其数值大小由MATLAB控制策略模型实时提供;
3) 通过输入、输出状态变量的创建,实现无人机的受控起飞过程联合仿真
2 风场模型建立
风速是描述风特性的一个重要参数。为描述平均风速沿高度方向的变化规律,需引入平均风梯度,也就是风剖面的概念[6]。
A.G.Davenport等通过指数函数描述风速沿高度变化规律如下:
(1)
根据本文研究无人机的实际使用区域规划,发射区域多处于A两类地形,可确定地面粗糙度系数α为0.12。
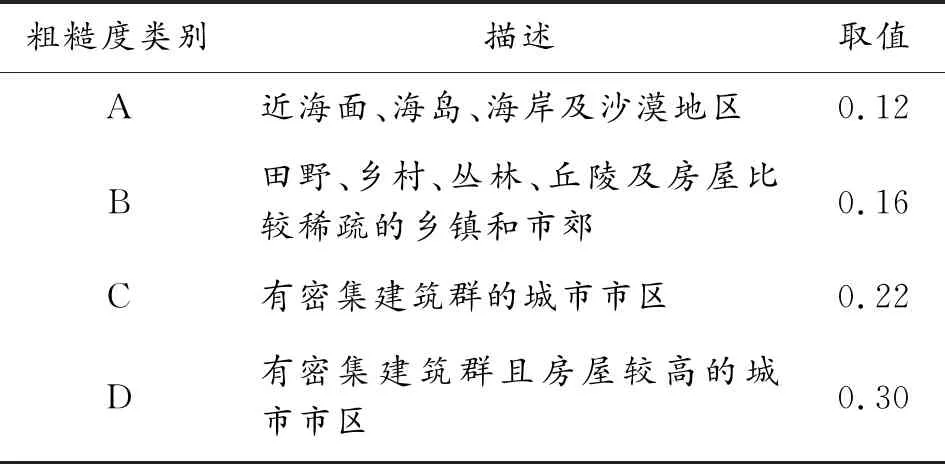
表1 粗糙度类别及粗糙度系数
瞬态中国帽风载荷计算方法即保持了最低风速速不小于平均风速、又可以分析风的突变对发射过程的影响[7]。本文采用瞬态中国帽风载荷计算方法建立无人机发射过程的风载荷模型。
为确保分析结果的安全裕量较大,本文中的最大瞬时风速值取为对应工况下平均风速度的2.0倍。某一工况下的风速时程曲线如图2(取无人机质心的初始离地高度为1 m)。该工况下,标准高度10 m处的平均风速为10 m/s。
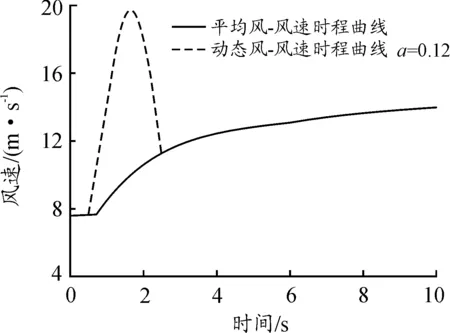
图2 某一工况下的风速时程曲线
在MATLAB中编制风剖面计算模型,将其嵌入到已建立的联合仿真模型中,实现无人机发射过程姿态变化与风场变化的耦合计算。
3 发射过程动态响应影响因素敏感度分析
3.1 样本空间
在试验领域,试验样本点的选取是建立近似模型的重要前提。样本点的数量越多,样本点在设计空间中的分布就越具有代表性并且样本点数据所包含的原分析模型的信息就越多,建立的近似模型也就越准确。但是数量较多的试验样本点必然会带来计算量大、计算时间长的问题[8]。因此,为了构建具有较高精度的近似模型,本文选用优化拉丁超立方试验设计方法产生样本点。
综合考虑助推火箭安装角纵向偏差、火箭安装角横向偏差和侧风,共3个设计变量对起飞过程动态响应的影响,影响因素取值范围见表2所示。

表2 设计变量及其取值范围
在试验设计领域,试验样本点的选取是建立近似模型的重要前提。优化拉丁试验设计生成的样本点能更加均匀地分布在设计空间中。优化拉丁超立方试验设计则兼备了均匀设计和拉丁方设计的优点,得到了越来越广泛的应用[9]。
本文选用优化拉丁超立方构建3个影响因素的共81组样本。
3.2 近似模型建模与有效性验证
本小节采用径向基神经网络对由拉丁超立方试验设计方法得到的样本数据进行训练,得到近似模型网络结构,并对近似模型精度进行检验,为进一步开展影响因素灵敏度分析奠定基础。
1) 误差分析。选择最小俯仰角、最大俯仰角、最大侧倾角、最大偏航角和3 s时刻高度作为无人机起飞动态响应评价参量,从训练样本中随机选取4组数据对近似模型进行误差分析,分析结果如表3~表7所示。
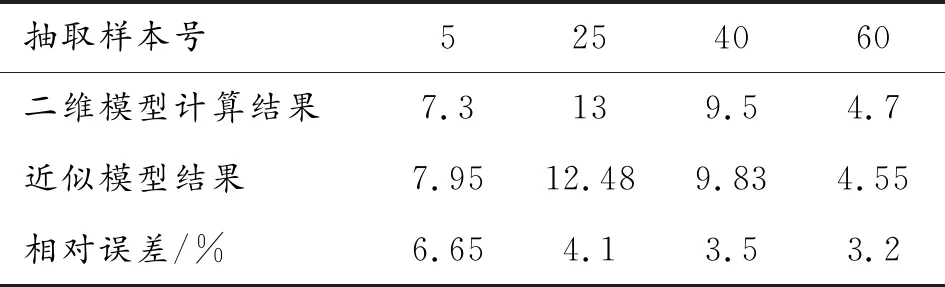
表3 最小俯仰角近似模型误差分析

表4 最大俯仰角近似模型误差分析

表5 最大侧倾角近似模型误差分析
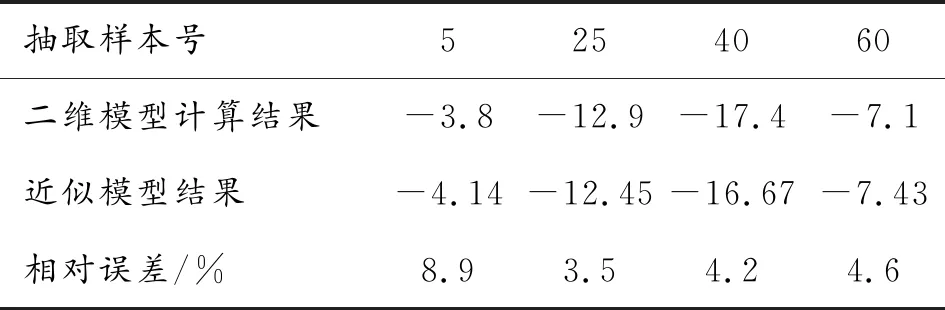
表6 最大偏航角近似模型误差分析

表7 3 s高度近似模型误差分析
可知,随机选取的4组数据中,采用径向基神经网络训练得到的近似模型计算结果与高效分析模型计算结果最大相对误差为8.9%,近似模型精度较高。
2) 方差分析。采用R2来描述径向基神经网络近似模型的拟合精确度。如图3~图7所示,近似模型的R2为0.92,方差接近于1,近似模型较为准确。

图3 R2方差分析—最小俯仰角的关系曲线

图4 R2方差分析—最大俯仰角的关系曲线

图5 R2方差分析—最大侧倾角的关系曲线
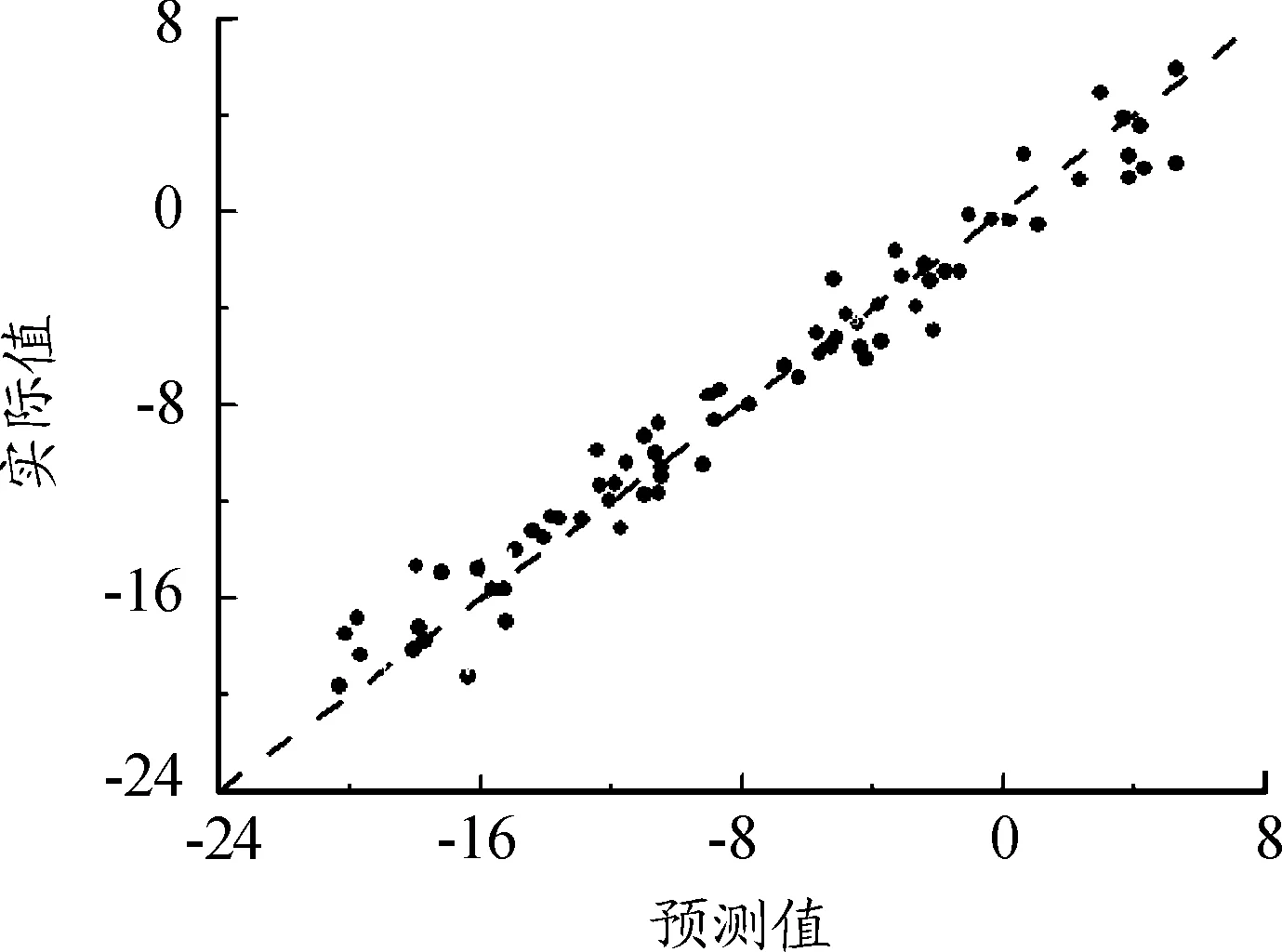
图6 R2方差分析—最大偏航角的关系曲线

图7 R2方差分析—3 s高度的关系曲线
综合误差分析与方差分析可以得出结论:临界速度近似模型精度较高,可以基于此近似模型开展进一步的起飞过程动态响应影响因素灵敏度分析研究。
3.3 影响因素敏感度分析
采用多元二次回归和优化拉丁超立方试验设计方法,对起飞过程动态响应的影响因素进行敏感度分析。
所选3个影响因素的敏感度如图8~图12所示。可以看出:上下偏角因素对起飞过程的最小俯仰角和3 s高度两个动态响应量影响最大;侧风因素对起飞过程的最大俯仰角和最大偏航俯仰角两个动态响应量影响最大;左右偏角对起飞过程的最大侧倾角动态响应量影响最大。

图8 最小俯仰角影响因素敏感度分析Pareto图

图9 最大俯仰角影响因素敏感度分析Pareto图

图10 最大侧倾角影响因素敏感度分析Pareto图

图11 最大偏航角影响因素敏感度分析Pareto图

图12 3 s高度影响因素敏感度分析Pareto图
4 结论
1) 采用基于ADAMS/Matlab的联合仿真方法,在ADAMS中建立了起飞段动力学模型,在MATLAB中建立了飞控系统模型与风场模型,实现了该型无人机风载荷作用下的受控起飞仿真建模。
2) 选取火箭安装角纵向偏差、横向偏差与风载荷三个因素为设计变量,采用优化拉丁超立方设计方法产生了样本空间,仿真计算了对应样本下的无人机起飞过程动态响应。
3) 根据得到的样本值,采用径向基(RBF)神经网络方法,建立了起飞段近似模型,采用多元二次回归方法,对起飞段段无人机动态响应的影响因素进行了敏感度分析,得到了上下偏角因素对起飞过程的最小俯仰角和3 s高度两个动态响应量影响最大、侧风因素对起飞过程的最大俯仰角和最大偏航角两个动态响应量影响最大、左右偏角对起飞过程的最大侧倾角动态响应量影响最大的结论。
4) 不同的设计变量对无人机发射段的动态响应影响敏感度不同。
本文提出的风场下起飞段联合仿真建模方法和敏感度分析结果,可为该型无人机的设计和安全性评估提供参考。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
环球慈善(2019年6期)2019-09-25
新西部下半月(2017年6期)2017-07-19
新课程·中旬(2017年2期)2017-03-29
中外医疗(2017年1期)2017-03-20
小朋友·快乐手工(2016年5期)2016-05-14
小朋友·快乐手工(2015年10期)2015-11-02