电动车跷跷板运动控制系统设计*
2020-11-05 10:56杜金祥
机械工程与自动化 2020年5期
杜金祥,岳 光
(1.太原工业学院 自动化系,山西 太原 030008;2.中北大学 机电工程学院,山西 太原 030051)
0 引言
智能控制技术在当今社会方兴未艾,各种高科技也广泛应用于智能小车和机器人玩具制造领域,使智能机器人越来越多样化。智能小车是一种多种高新技术的集成体,它融合机械、电子、传感器、单片机等多学科知识,涉及当今许多前沿领域技术。本文针对国内传统电动车跷跷板玩具小车控制系统的控制缺陷,如运动的不稳定性、低可靠性,设计出一款新颖的基于最优PID整定算法的电动车跷跷板运动控制系统。其采用美国ATMEL公司专门应用于控制领域的AT89S52芯片为控制系统核心,通过采集陀螺仪传感器MPU-6050精确测量电动车运行姿态数据,精确控制驱动4个电机的运转速度,以达到对电动车跷跷板运动精确控制,在完成指定任务后报警模块给予任务完成提示,同时AT89S52芯片外扩LED显示屏,方便用户读取数据。
1 电动车跷跷板运动控制系统设计方案
图1为电动车跷跷板运动模型。本文设计的电动车跷跷板运动控制系统主要由控制器模块(AT89S52)、黑线检测模块、电机驱动模块、启停探测模块、平衡点检测模块、显示模块、声光指示模块和计时模块组成,实现智能小车自动巡线、判断平衡等功能,其原理框图如图2所示。单片机控制自动平衡小车的运动,通过MPU-6050三维陀螺仪加速度计采集倾角θ的变化,将信息送入主控器AT89S52分析处理数据完成相应动作。
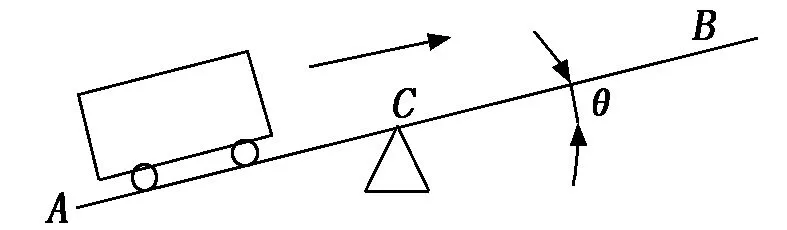
图1 电动车跷跷板运动模型
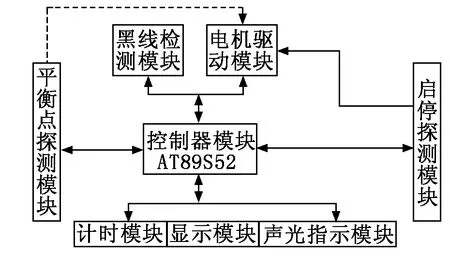
图2 电动车跷跷板运动控制系统原理框图
当小车从一边行驶上跷跷板,板的一端开始受力直到车体到达板的中心重力点,跷跷板两端受力均匀,此时达到平衡。支点可以控制跷跷板的倾斜角度以及平衡难易程度,支点与面板之间的截面积越大越趋于平滑,小车越容易平衡。本设计的根本内容是寻求小车在跷跷板上达到的平衡状态。
图1中,A、B两点之间的长度为L,C点为平衡板的中心。使用探寻黑色循迹线的方法使小车按照设计需求的路线正常行驶,并通过陀螺仪来检测反馈空间角度,使电动车平衡在跷跷板的中心位置。本系统的作用就是控制电动小车在跷跷板上达到平衡位置,即停留在C点附近并发出声光提示。该平衡定义为A、B两点与地面的距离Da、Db差D=|Da-Db|不大于40 mm,在中心点C附近处于平衡就是要求跷跷板在支点位置上下移动的角度处于一定的可控范围内,即:
θ=arcsin(D/L).
(1)
电动车控制是电动车跷跷板整个系统中最重要的控制环节,以AT89S52为控制器,采用先进的PID整定控制算法。采用三维角速度陀螺仪加速度计模块MPU6050对跷跷板三维运动状态的数字信号进行采集、计算,得出相应的输出值,并输出到直流电机控制回路,参与跷跷板姿态控制。电动车控制系统框图如图3所示。在单片机的I/O口上连接一个显示屏,将单片机所处理的数字信号转化为模拟信号在屏幕上显示出来。

图3 电动车控制系统框图
2 电动车跷跷板循迹原理及主控制流程
2.1 循迹原理
探测路面黑色循迹线(这里的循迹是指小车在白色地板上循黑线行走)的原理是:利用红外线在不同颜色表面具有不同的性质这一原理,使用一些集合发射和接收为一体的探头来向地面发射红外线。事前将地面木板涂成白色,中间有一根黑色的线条,红外线遇到黑白线条具有不同的反应,然后反射给接收器这样就产生了不同的信号。不同的信号对应着不同的电压,这些电压经过电压比较器得出信息,并将这些信号传输给控制核心单片机,单片机对这些信号进行调节。在小车的前面和后方底盘下面分别安装4个集成式红外探头,4个对管排成一直线,分别检测路面的白线和黑线并有效地反馈路线信息,由此实现循迹行驶,然后根据传感器状态适度调整小车的偏转。
2.2 电动车跷跷板控制系统控制流程
电动车跷跷板控制系统以小车平衡为主线,显示电动车在A、B、C点的状态,平衡状态时发出声光报警信号,系统控制流程如图4所示。按下电源键整个系统开始工作,单片机、循迹驱动模块及电动机、陀螺仪、LCD(1602A)开始初始化。单片机驱动电机在跷跷板上的循迹路线上开始前进,在电动机运转的同时,陀螺仪不断读取角度并将角度的变化通过线路传输给控制中心单片机。单片机通过数据转换将角度信号转换为电压信号,通过电压比较器进行平衡比较。如果小车停止行驶,反馈给单片机的角度信号正好在平衡值范围内,此时小车正好处于跷跷板中心位置C点附近,则小车完成任务,液晶显示器显示此时的角度值,发光二极管及蜂鸣器开始工作;如果小车第一次停止时反馈的角度值不在平衡范围内,此时需要将信号进行比较,然后单片机控制驱动模块使小车倒退到指定位置(C点附近),到达指定位置后做出平衡反应。
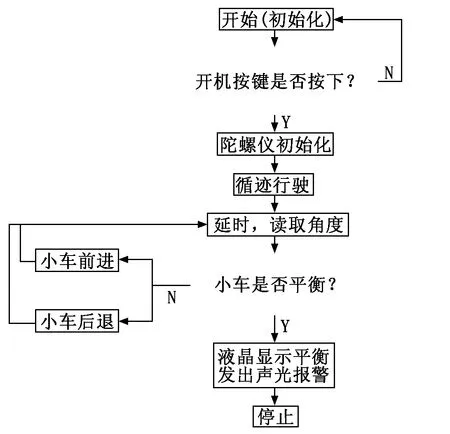
图4 电动车跷跷板控制系统控制流程
3 实验测试
图5为依据本控制系统制作的电动车跷跷板,当小车按预定轨道行驶时,由陀螺仪传感器检测跷跷板的平衡状态并反馈给单片机来控制电动小车,最终使跷跷板处于平衡状态并发出声光报警。采用不同的运动速度(即算法修正)测试5次,并记录所用时间以及最大偏差距离,得到的实际测试数据如表1所示。

图5 电动平衡小车试验
由表1可知:电动平衡小车基本能够按照预期的要求行驶在跷跷板上并将其调平衡,小车在循迹、显示等方面存在的误差经过算法修正在逐渐减小,可达到理想期望状态,而且小车在达到平衡状态时都能进行及时报警指示。
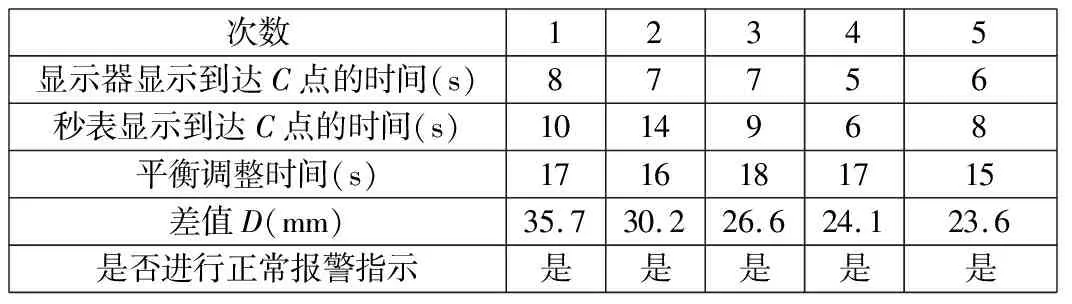
表1 平衡小车运行测量数据
4 结语
本文设计的跷跷板控制系统与传统跷跷板控制系统相比,控制精确并且扩展性优越、控制精度高,为电动小车的精确控制打下了扎实的基础,同时也验证了系统设计的可行性和实用性。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
小学生必读(低年级版)(2022年10期)2022-02-16
北京航空航天大学学报(2021年9期)2021-11-02
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
百科探秘·航空航天(2017年9期)2017-12-31
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
学苑创造·A版(2016年9期)2016-10-10
系统工程与电子技术(2016年7期)2016-08-21
数学大王·低年级(2009年9期)2009-12-15