
一种基于三维光学测量技术的固体火箭发动机喷管全场形貌测量方法
2020-11-10 08:43樊博璇陈桂明林洪涛
航天制造技术 2020年5期
樊博璇 陈桂明 林洪涛 李 辉
一种基于三维光学测量技术的固体火箭发动机喷管全场形貌测量方法
樊博璇1陈桂明1林洪涛2李 辉3
(1. 火箭军工程大学,西安 710025;2. 中国人民解放军31004部队,北京 100091;3. 火箭军装备部驻西安地区第一军事代表室,西安 710025)
针对传统接触式测量手段存在的挤压误差、效率低等问题,提出基于外差式多频相移技术的非接触式三维光学形貌测量方法。在论述三维光学形貌测量原理的基础上,分析并设计了三维光学形貌测量方法的功能、工作过程和主要模块,阐述了外差式多频相移光学测量、海量密集点云的优化处理、大尺寸零件全方位精确测量等关键技术。通过该方法能够快速、准确建立固体火箭发动机喷管等零部件的三维数字化模型,为固体火箭发动机的检测及创新设计提供更丰富的基础数据。
固体火箭发动机喷管;三维光学;形貌测量;数字化

1 引言
固体火箭发动机喷管工作时由于受高温、高压燃气的冲刷,会发生严重烧蚀甚至形变,直接影响其工作效率和可靠性。必须获取整个喷管精确的内外表面形貌数据分析喷管烧蚀和形变等情况。目前,国内使用游标卡尺手工测量,喷管性能研究则采用数值模拟方法,对喷管形变测量方面的研究较少[1~4]。手工测量方法测量效率较低、测量范围小,无法准确获得火箭发动机喷管关键部位的形貌特征数据,极大地限制了对喷管变形以及快速成型加工技术的研究发展。
提出非接触式三维光学形貌测量方法,通过采集点云图像,实现对喷管三维形貌的精确测量。测量过程无需接触喷管,避免了卡尺挤压型面造成精度损失,能够快速获得喷管各部位的全场精确轮廓数据,为温度场和流场模拟及有限元静强度分析提供数据,对于构建准确的喷管理论仿真模型具有重要的支撑作用。
2 三维光学形貌测量原理
三维光学形貌测量应用外差式多频相移三维光学测量方法,结合结构光、相位测量、计算机视觉等技术于一体,实现对固体火箭发动机喷管形貌的三维信息数字化和测量[5]。
相位测量法需要精密的相移装置和正弦性良好的条纹光栅,测量难点在于解包裹。系统解包裹方法为格雷(Gray)码法,如图1所示。
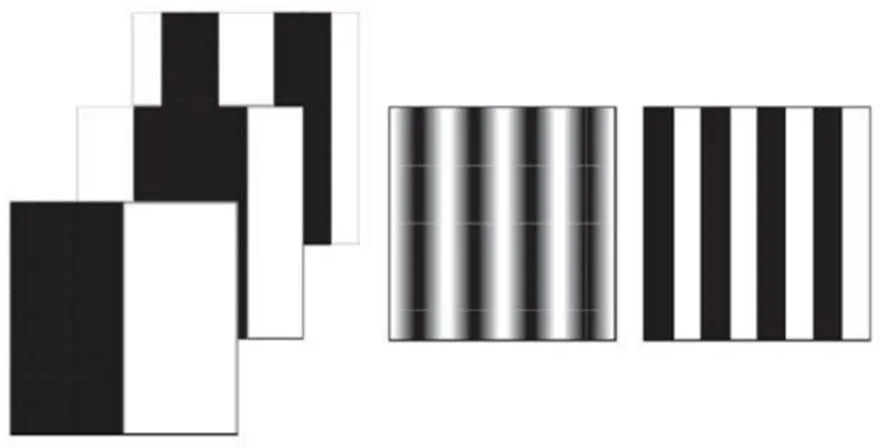
图1 格雷码光栅条纹
采用光学非接触式测量方法对喷管测量三维形貌的优点有:
a. 采集到的数据可用于零件(喷管)的快速成型加工。在没有零件图纸的情况下,对扫描获得的零件三维模型,在软件中优化处理,通过3D打印,可实现喷管的快速制造成型。
b. 实现加工前后零件(喷管)的数模比对。对于有图纸的零件,为了检验零件制造完成后的加工误差,可以扫描加工后零件的尺寸,将设计与制造后的3D模型对比,获得零件的加工误差,为设计余量提供参考。
c. 为零件(喷管)的力学性能分析提供依据。喷管工作过程中由于受到高温喷射气体的作用,其内部受到温度场、流场和压力场的作用,当设计考虑不足时,则有可能会发生局部敏感部分的膨胀变形甚至是裂纹的情况。通过采集喷管工作后的形貌,找出喷管工作前后变形最大的位置,分析判断其是否超过疲劳强度,可以对防热材料以及结构的改进提供依据。
3 三维光学形貌测量方法分析与设计
3.1 功能分析与设计
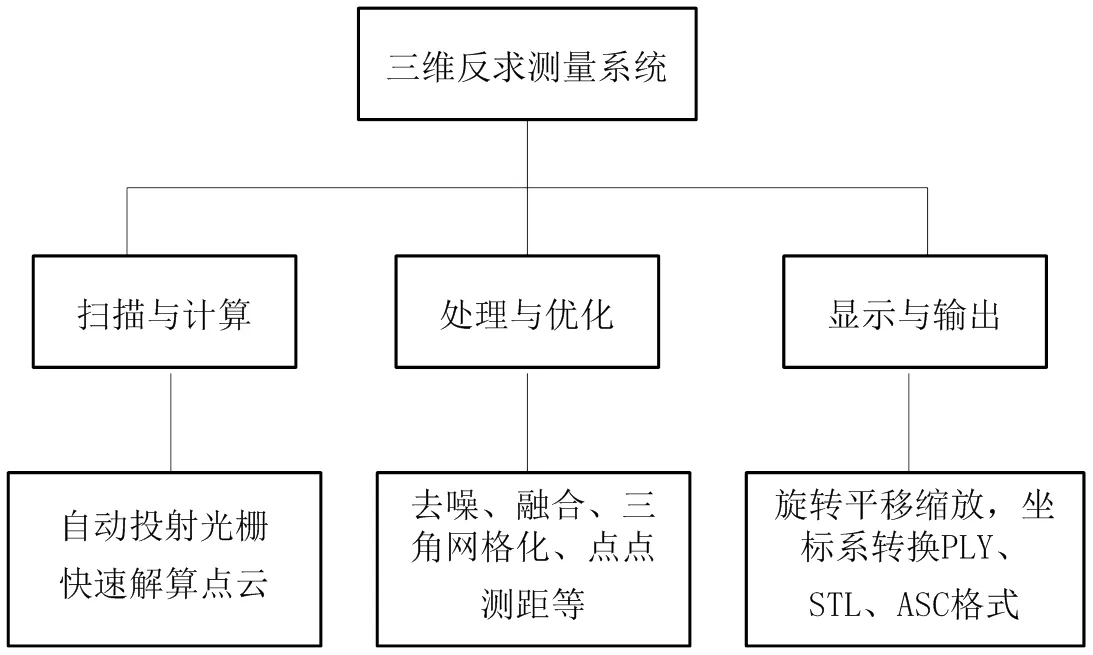
图2 三维光学形貌测量方法功能需求
根据零部件快速测量需求,主要实现如图2所示的三个方面功能:
a. 扫描控制接口和点云求解,包括光栅条纹参数的设置及投射、相机实时采集等。通过投射采集得到12个状态并快速解包裹计算,求得被测曲面的点云坐标。
b. 坐标转换,点云对齐融合以及三角化算法。单次测量可以得到一个方位上的点云信息,多方位点云信息时需要转动零件或测量头多次测量,而多幅点云的坐标系不同,需要将它们统一坐标系,同时将其公共区域的点云去重简化。简化后进行三角网格化生成实体模型。
c. 三维界面显示以及数据格式输出。可以在软件窗口中显示零件的测量面,便于调整零件的测量位置。并且也应该显示零件表面轮廓点云的测量结果,通过旋转、平移、缩放等操作完成对数字化零件视角的转换,方便查漏补缺。
3.2 工作过程分析与设计
3.2.1 前处理
调试测量所需的相机位置关系,确定测量距离和相机之间的间距,调节焦距和光圈到一个合适的位置。利用标定板和自标定算法得到相机的内外参数,建立测量的坐标系。手动点击扫描按钮,投影仪会投射出12个状态的光栅图像,由两个照相机同时采集被零件调制的变形条纹图像。通过图像处理,识别出布置在零件表面或是零件周围的椭圆形标记点。这些标记点通过相机的参数可以被重建,用于两个相邻状态之间的坐标对齐。
3.2.2 计算处理采集的图像
完成标记点的中心定位;结合立体视觉极线约束理论,立体匹配同一状态两个相机同时采集的图像,计算标记点的图像坐标,然后根据标定结果重建其三维空间坐标;这些标记点的空间坐标主要被用来拼接两幅点云。即转换前后两个状态的点云,使之在同一坐标系下。
对变形条纹的处理,通过多频相移解包裹,求出这12个状态下,每个像素位置和相机内外参数,重建出物体表面的各个点。对轮廓密集点云的处理,主要通过算法完成点云去噪,融合相邻状态之间的点云,在坐标对齐的基础上将重复的点去除。
3.2.3 后处理。
利用OpenGL图像开发工具和计算机图像显示模块,开发用于计算结果可视化窗口,并通过人机交互操作,实现多角度观察、三维显示截图、标准化报告输出等功能。测量过程的主要功能如图3所示。
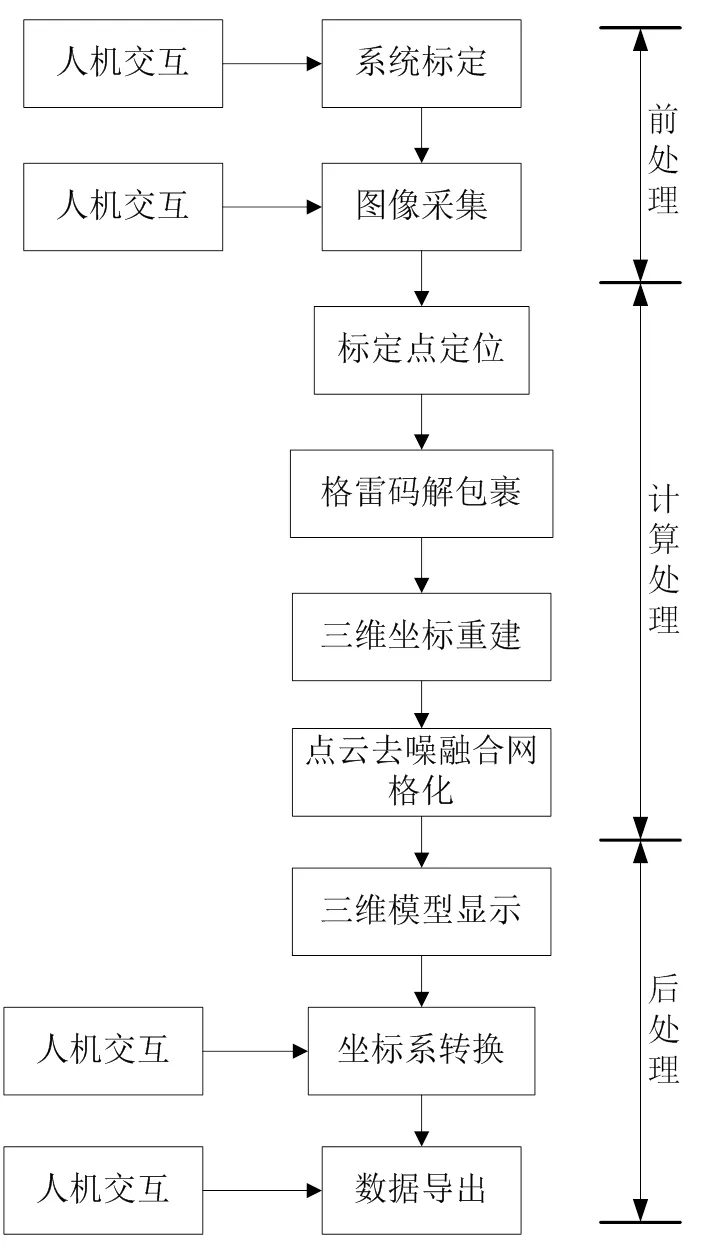
图3 系统工作过程
3.3 主要模块分析与设计
主要模块包括标记点识别定位模块、相机标定模块、三维坐标重建模块、坐标系转换模块以及结果显示输出模块。
3.3.1 标记点识别定位模块
测量的最终目标是获取喷管表面的轮廓点云,先求解相机的内外方位元素,确定相机在空间中的位置和坐标系。通过识别标记点确定前方交会相机参数。
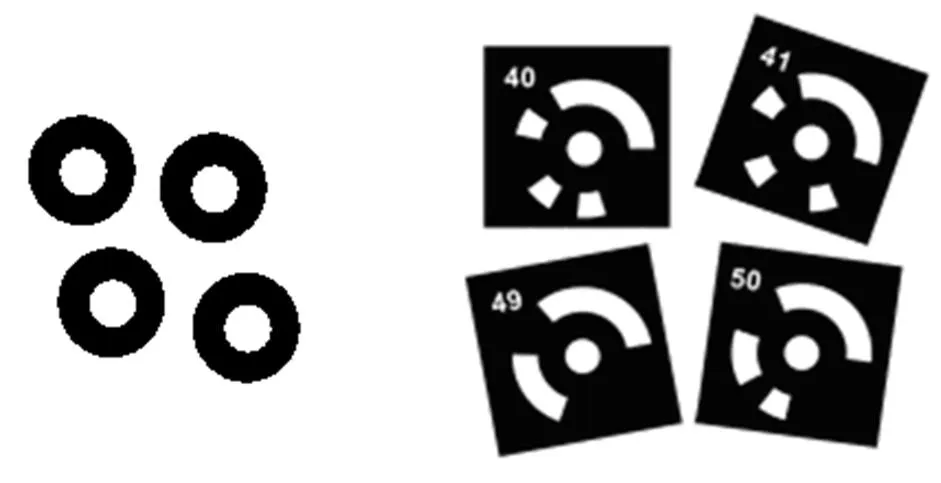
图4 非编码标记点和编码标记点
设计的标记点如图4所示,分为编码标记点和非编码标记点,右边为编码标记点。为了实现标记点的自动检测及高精度定位,首先通过梯度二值化图像,在二值化图像中粗定位椭圆,得到一个包含椭圆的大致的区域;其次,在这个小的区域内局部Canny检测,得到单像素的目标边缘;接着,用改进的梯度幅值法计算边缘点的亚像素坐标;最后,用亚像素边缘拟合椭圆得到精确的椭圆中心坐标作为标记点中心的定位。为保证标记点的准确提取,在椭圆中心的定位过程中添加一系列的约束准则,用于剔除图像中的非标记点目标,最终得到准确的高精度标记点的定位。该过程如图5所示。
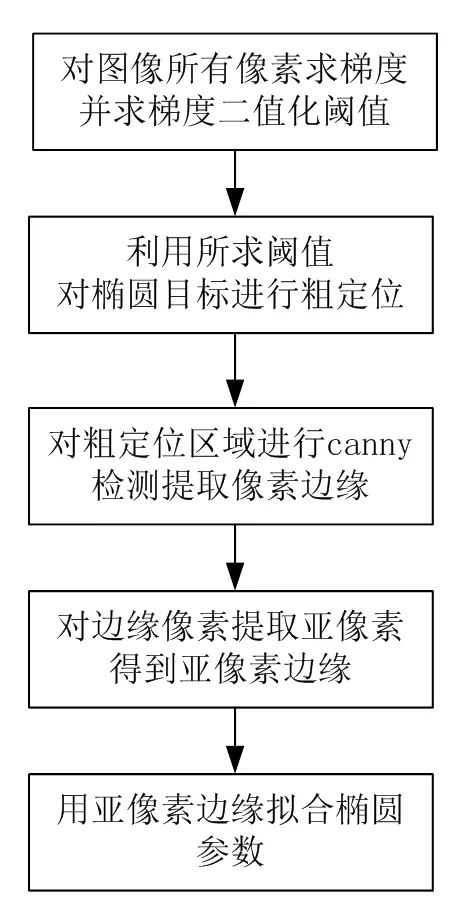
图5 标记点中心定位过程图


3.3.2 相机标定模块
相机标定的任务是求解相机的内外方位元素,它是三维视觉测量技术的基础。传统的相机标定方法一般使用张正友模型,但由于该模型考虑的畸变系数较少,标定精度不太高。为了保证标定结果的精度,本设计方案采用10参数相机畸变模型,提出基于光束平差的相机自标定算法,初始值求解时的畸变模型为:


光束平差时使用的畸变模型:

=1··2+2··4+3··6+2(2+22)+2···1(7)
其中,AA、A为径向畸变参数;B、B为切向畸变参数;E、E为薄棱镜畸变参数。将以上误差加入摄影测量基本共线方程中,得到像点的误差方程式为:

式中,为像点坐标的改正值;1、2、3为外方位元素,物方点坐标和相机内部参数。


其中,3为待标定相机内部参数,包含了径向畸变、偏心畸变和像平面畸变等10个未知参数。利用上述公,通过光束平差标定运算以除解算相机的内部参数,同时修正标定板上非编码点的三维坐标,可有效消除绝大部分的系统误差,标定的重投影误差<0.1像素。
利用上述算法计算出测量的所有内外部结构参数,借助于系统配置的标准标定板,重建出测量点的三维坐标。标定板上按照一定规则分布有编码点和非编码点,带有两个标尺信息,标尺即标定板上两斜对角标记点间的距离。在系统的标准测量距离下,依次采集八个不同方位的模板图像。
设计的标定模块导入相机采集的标定板图像,即可自动完成标定,并显示标定结果。同时,为方便不同型号相机的快速标定,模块应提供标定参数设置功能,可灵活设置视场参数、待标定相机参数和标定板的参数,以满足不同的标定要求。
3.3.3 三维坐标重建模块
利用双目立体视觉原理重建图像点的空间[6]。如图6所示,双目CCD相机和投影仪成等角度摆放,通过两个摄像机坐标系之间的旋转矩阵R和平移矩阵T,就可以利用三角测量原理求得P点在物方坐标系下的三维坐标。
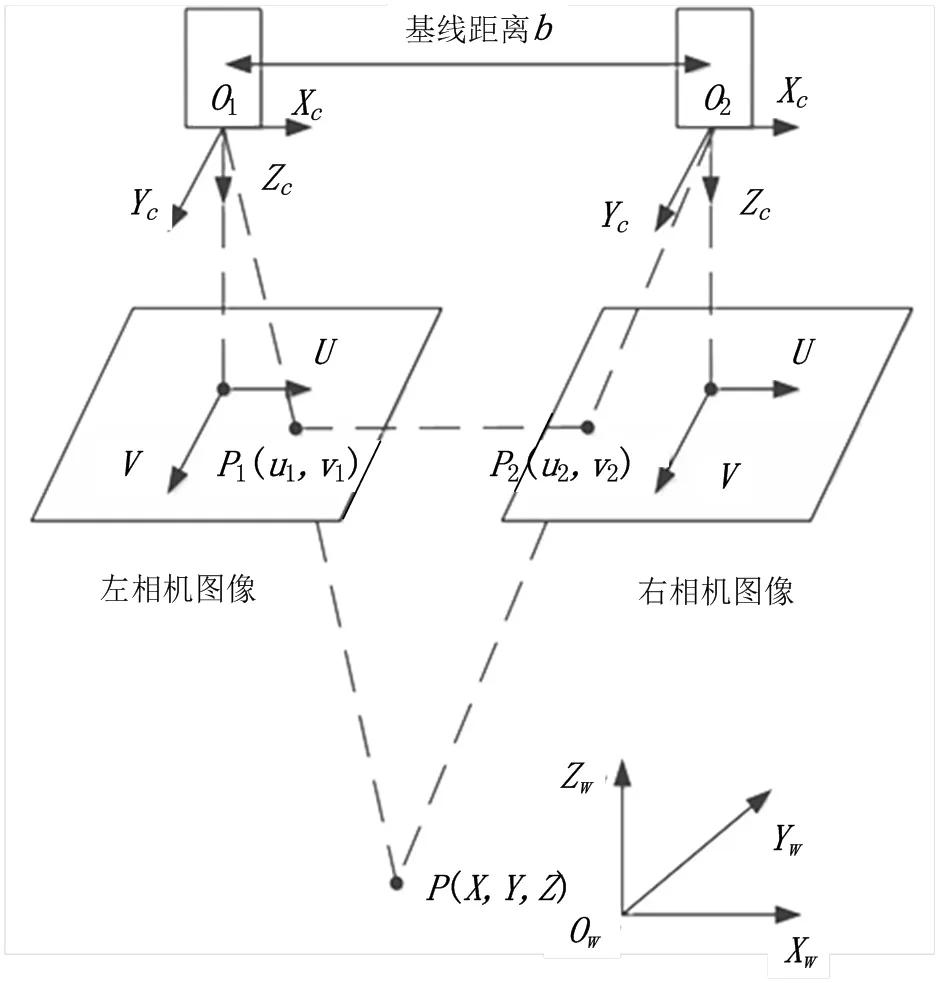
图6 双目立体视觉模型
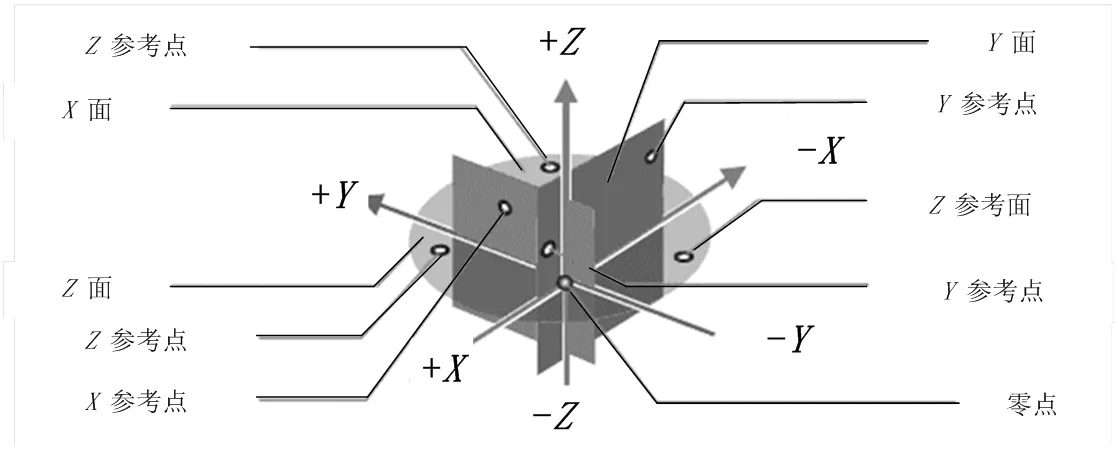
图7 3-2-1坐标系定义及转换示意图
如图7所示,以双相机视觉测量为例,寻找利用两个相机记录下空间同一场景的图像中的对应点。如果两相机间的标定外参数(位置关系)已知,就能够确定两相机公共视场内被模型表面标记点的三维空间坐标。图像坐标与空间坐标的转换关系为:

其中=1,2,即为:

转换为矩阵形式:
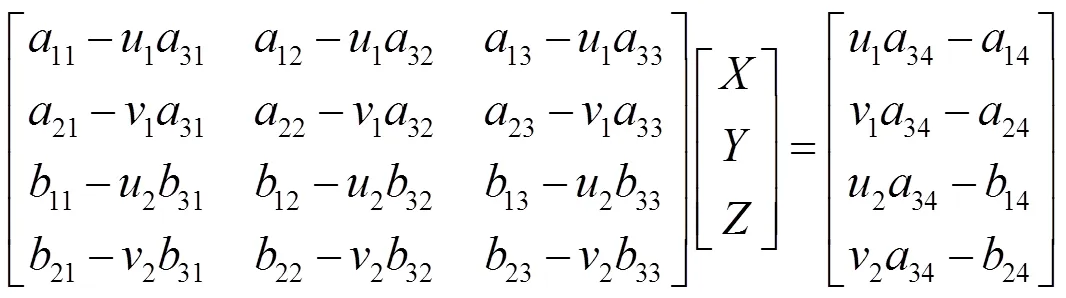
其中,是标记点的三维空间坐标,ab分别为两幅图像投影矩阵的元素,1、1为该空间点在第一个相机图像中的像坐标,2、2为该空间点在第二个相机图像中的像坐标。4个方程解算3个未知数,利用最小二乘法即可计算出最优解。重复这一过程即可得到被测模型表面所有标记点的三维空间坐标。
3.3.4 坐标系转换模块
通过测量得到的点云数据,其坐标系默认为相机标定后建立的坐标系,为了比对研究喷管的数字化模型,需要设计坐标系转换模块,进行3-2-1坐标转换,免去了在用于其他分析时坐标系配对的繁琐。
采用3-2-1坐标转换的方法建立测量坐标系,就是通过在不同平面放置的标记点来达到这个目的。图8是采用3-2-1方法建立被测物坐标系的示意图,坐标系定义需要6个标记点。其中,平面参考点1、2、3构成的平面定义了坐标系的方向,直线参考点1、2则定义了坐标系的方向,另外一个参考点则定义了坐标系的方向。通过这种方法,可以非常方便地将测量坐标系转换到任意位置,使之与坐标系平行。
3.3.5 结果显示输出模块
三维显示模块主要使用OpenGL库实现点云空间显示,并使用库中的函数完成旋转平移缩放等可视化功能。相机图像的显示使用MFC和相机自身的SDK编程实现。这一模块包含的功能有:
a. 相机视窗能够显示被测零件的位置,并且实时捕捉图像范围内的标记点;
b. 计算结果三维显示,图像可旋转、平移、缩放等视图操作,并具有选取和分析计算功能,如测量点间距等;
c. 为了更好的显示扫描结果,给出三角网格化结果。便于在软件中查看面片及体的生成结果;
d. 产生的点云数据结果文件输出格式为ASC或PLY等,这种通用的数据格式均可在其他软件中应用。
4 三维光学形貌测量方法关键技术
4.1 外差式多频相移光学测量
采用外差式多频相移光学测量技术,利用四步相移法,每步有三个频率,可获得三种位相转变模,求取多种条纹的相位主值,恢复出条纹的真实相位[7]。
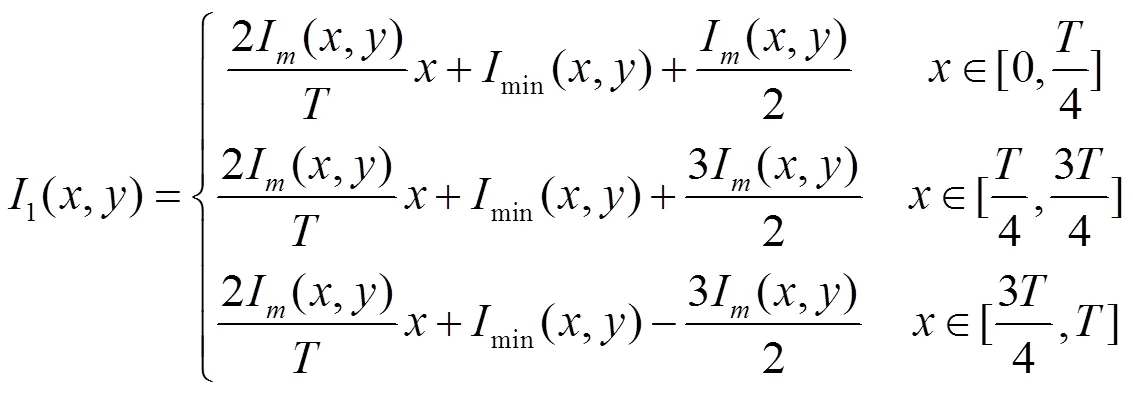
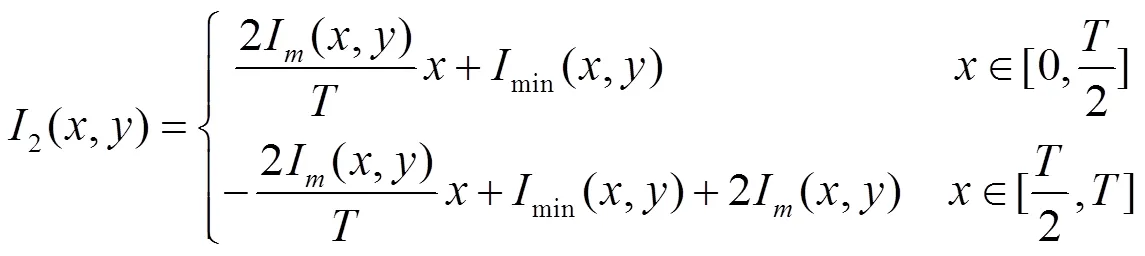



式中,1(,)、2(,)、3(,)和4(,)分别为四步位移的光强,为模式周期,min(,)和max(,)为四种位移光强的最小值和最大值。I(,)是调制强度。
相位差是:

由三角测量法求出物体表面该点的高度值:
4.2 海量密集点云快速坐标配准
由于三维光学形貌测量方法测量精度较高,单幅扫描测量得到的点云中点的数目在几十万个。对于喷管类回转体的测量,由于需要转动测量位置多次测量才能获得整体形貌测量数据,导致测量得到的点云数目庞大。因此需要考虑如何快速地实现点云配准。
通过标记点识别和三维重建技术解算单幅点云中的空间标记点坐标,利用两次测量检测到的公共标记点,求解出坐标系之间的旋转变换矩阵,重建准确的标记点坐标,可以保证拼接的精度。同时由于只有为数不多的公共标记点参与坐标变换,极大地加快了配准速度。
两幅零件图像中关联点之间的配准主要是使用四元数法[8]。假设两组一一对应的三维坐标点集分别为{p}和{q},每个点集中点的个数为(≥4)。计算四元数矢量的过程如下:
a. 计算三维点集{p}和{q}各自的质心µ和µ,如式(22)所示:


d. 由3×3构造4×4对称矩阵a。
计算M的最大特征值所对应的单位特征向量,该向量就是所求的四元数矢量。由此可根据四元数和旋转矩阵的关系,求得旋转矩阵。
计算平移矢量。
因此,采用单位四元数法旋转坐标、求解平移矩阵。
4.3 大尺寸零件全方位精确测量
对于尺寸较大的零部件,甚至数倍于测量幅面时,当依靠前后公共点坐标配准时,会出现累积拼接误差和测量速度慢的情况[11]。为了提高大尺寸喷管扫描拼接的速度以及喷管表面轮廓点云的测量精度,提出了一种使用全局点快速配准的方法。
在被测物体周围布置一定数量的标记点,通过摄影测量技术,解算出这些点的空间坐标。当扫描测量时,单幅扫描获得了局部标记点的空间坐标,这些标记点的空间位置关系采用算法整体映射在全局空间中。同理,在保证整个测量过程中全局点的空间位置相对不变的情况下,任意测量方位获得的点云总是可以快速地加入到全局空间。这种快速的全局配准方法,测量过程不必去考虑前后测量面的公共重合程度,在测量距离下可任意放置测量角度,极大地提高了测量的灵活性[12]。全局点的使用可以最大程度地减小测量累积误差,保证测量精度。
上述映射算法定义坐标系下测量获得的所有标记点集为,单幅扫描获得的标记点在其自身坐标系下的点集为,为大样本,为小样本,匹配流程如图9所示。
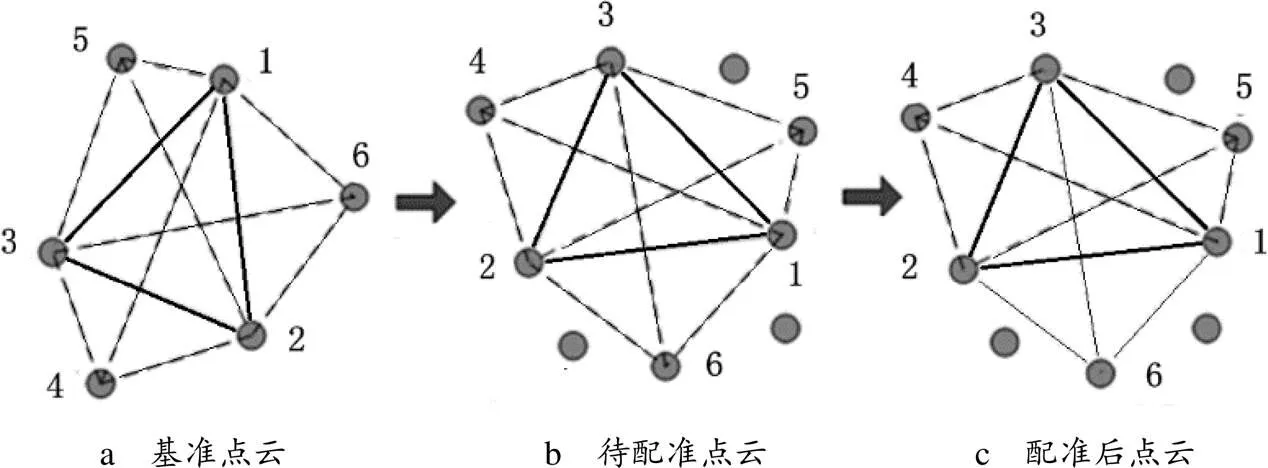
图9 全局点匹配原理示意图

5 结束语
a. 三维光学形貌测量方法受被测件表面明暗影响小,对于表面不反光的物体可以直接测量,不需要喷涂显影剂。与传统的测量方法相比,测量精度更高,且能够测量表面发生剧烈变化的零部件,并可测量大型工件,测量数据实时自动拼合,可用于不规则复杂曲面产品的移动便携式三维测量。
b. 硬件设备高度集成,一体化设计,性能稳定可靠。软件一体化集中控制所有硬件设备,包括相机、光栅投射器等。该方法能够准确获得零件表面的形貌数据,测量所得的数据可用于逆向加工和优化再设计。
c. 该测量方法可推广应用到航空航天、军工、汽车等高端制造行业,为更多国防重点型号和项目的设计制造提供一系列解决方案。在整个生产过程中对整机及零部件快速、无损检测,实现优化生产工艺,减少产品制造加工废品率以及节约原材料和能源的目的。
1 安志勇,曹秒,段洁. 数字化测量技术在飞机装配中的应用[J]. 航空制造技术,2013(18):48~51
2 张雨东,骆清铭. 超高分辨、高灵敏光学检测方法与技术[J]. 中国科学:信息科学,2016,46(8):1136~1155
3 张德海,梁晋,郭成,等. 三维数字化尺寸检测在逆向工程中的研究及应用[J]. 机械研究与应用,2008,21(4):67~70
4 毛先富,苏显渝,向立群,等. 基于手持相位标靶技术的光学三维坐标测量[J]. 光学学报,2010,30(7):2006~2011
5 韩江涛,张英杰,李程辉,等. 面向光学三维测量的非均匀条纹生成方法[J]. 西安交通大学学报,2017,51(8):12~18
6 孙伟,何小元,Quan C,等. 基于数字图像相关的三维刚体位移测量方法[J]. 光学学报,2008,28(5):894~901
7 Huntley J M, Saldner H O. Error-reduction methods forshape measurement by temporal phase unwrapping algorithms[J]. Meas.Sci. Technol,1997,8(9):986~992
8 刘晓利,彭翔,殷永凯,等. 借助标志点的深度数据全局匹配方法[J]. 光学学报,2009,29(4):1010~1014
9 梁新合,宋志真. 改进的点云精确匹配技术[J]. 装备制造技术,2008(3):41~42
10 张德海,崔国英,白代萍,等. 逆向工程中的三维光学检测点云采样技术研究[J]. 计算机应用研究,2014,31(3):946~948
11 Kinell L, Sjodahl M. Robustness of redueed temporal, phase unwrapping in the measurement of shape[J]. APPI. Opt, 2001, 40(14): 2297~2303
12 Helfrick M N, Niezrecki C, Avitabile P, et al. 3D digital image correlation methods for full-field vibration measurement[J]. Mechanical Systems and Signal Processing, 2011, 25(3): 917~927
A Method for Measuring the Full-field Morphology of Solid Rocket Motor Nozzle Based on Three-dimensional Optical Measurement Technology
Fan Boxuan1Chen Guiming1Lin Hongtao2Li Hui3
(1. Rocket Force University of Engineering, Xi’an 710025;2. Unit 31004 of the People's Liberation Army, Beijing 100091;3. The First Military Representative Office of the Rocket Force in Xiʼan, Xi’an 710025)
To overcome the problems of extrusion error and low efficiency of traditional contact measurement methods, a non-contact three-dimensional optical morphology measurement method based on heterodyne multi-frequency phase shift technique is proposed. On the basis of discussing the principle of three-dimensional optical topography measurement, this paper analyzes and designs the function, working process and main modules of three-dimensional optical topography measurement method, and expounds the key technologies of heterodyne multi-frequency phase-shift optical measurement, optimization treatment of massive dense point cloud, and all-round accurate measurement of large-size parts. It can quickly and accurately establish the three-dimensional digital model of solid rocket engine nozzle and other parts, and provide more abundant basic data for the detection and innovative design of solid rocket engine.
solid rocket engine nozzle;three-dimensional optics;morphological measurement;digital
樊博璇(1987),博士,兵器科学与技术专业;研究方向:武器系统运用与保障工程。
2020-08-11
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
交通科技与管理(2022年8期)2022-05-07
汽车实用技术(2022年4期)2022-03-07
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
当代陕西(2018年9期)2018-08-29
科技资讯(2017年24期)2017-09-15
