龙虾眼型X射线成像系统设计与仿真
2020-11-20 03:20杨宝璐穆宝忠
实验室研究与探索 2020年10期
王 新, 徐 捷, 杨宝璐, 穆宝忠
(同济大学物理科学与工程学院,上海200092)
0 引 言
X射线成像技术在天文、核物理、生命科学及安检等领域具有广泛的应用,是开展星体观测、等离子体诊断、细胞学研究及违禁品查缉的重要手段[1-4]。X射线光学系统可以实现对入射X 射线的偏转、聚焦或成像。在硬X射线波段,最为常用的是掠入射反射成像
系统,基于X射线的全外反射原理。常规的掠入射反射成像系统主要有Kirkpatrick-Baez (KB)系统[5]、Wolter系统[6]和毛细管X 射线透镜[7]等。这些光学系统具有高分辨、小视场的特点,对X 射线望远、显微成像做出了重要贡献。对于高能X 射线,掠入射角度一般很小,导致系统的集光立体角很小,探测灵敏度低且信噪比差,限制了对低辐射目标的探测能力。较小的掠入射角度也限制了系统的有效视场,影响探测的范围。在很多领域,大范围、高灵敏度探测正变得越来越重要,例如,在天文领域,对于遥远星团的观测;在安检领域,大范围、高灵敏度的探测可以提高查缉的效率及对隐藏违禁品的检测效果。上述掠入射光学系统已经不能完全满足大范围、高灵敏度探测的需求,亟须新型的X射线掠入射成像系统。
龙虾眼光学系统(Lobster-eye,简称LE)是近些年发展起来的一种新型X射线掠入射成像系统,是基于仿生复眼结构发展而来,拥有非常大的视场角。从结构上区分,龙虾眼光学系统可以分为Angel 型和Schmidt型[8-9]。Angel 型龙虾眼光学系统,由多个球面分布的方形反射通道构成。该光学系统理论上视场不受限制,在硬X 射线波段仍能获得较高的集光效率,如果反射通道足够小,空间分辨率甚至可以达到几个角秒[10]。Angel型龙虾眼光学系统的大纵横比、超光滑方形通道的加工和抛光难度极大,这严重限制了其在大放大倍率、大视场成像中的应用。Schmidt型X射线聚焦光学系统由一系列平面反射镜堆叠而成,两个镜片组依次正交排布,构成一个二维聚焦或成像系统,能够在适当分辨率(约1 mm)的情况下,实现大视场(几十cm,甚至更大)成像。Schmidt 型X 射线聚焦光学系统,基于龙虾眼成像原理,与Angel 型相比,结构上的差异仅为子午与弧矢方向镜片相互错开。两组相互错开的镜片导致子午和弧矢方向分辨率存在微小差异,一定程度上影响了系统的分辨率。由于系统能够实现大视场、高集光效率成像,且制作相对容易,Schmidt型龙虾眼光学系统依然是硬X射线波段主要的大视场、高集光效率成像系统。
目前Schmidt 型龙虾眼光学系统主要为望远结构,用于天文领域的X 射线全天空监视,例如ESA 的Lobster—ISS计划[11]。在有限远距离,Schmidt 型龙虾眼光学系统也能够实现大视场、高集光效率的成像,具有很大的应用潜力,例如在安检领域,通过龙虾眼光学系统对被检物体辐射的康普顿背散射X 射线进行成像,可以探测隐藏在行李箱、木箱、集装箱甚至墙壁后面的危险品[12-13]。龙虾眼光学系统的有效视场、分辨率和集光效率等关键指标由系统光学结构决定,优化设计系统光学结构是实现高性能成像的关键。目前,针对Schmidt型龙虾眼光学系统的设计方法主要是面向望远结构成像系统,依据光学设计研制用于天文观测的Schmidt 型龙虾眼望远系统[14-16]。在有限远距离,光学结构对于成像性能的影响与望远结构具有明显的不同,为了在有限远距离实现大视场、高集光效率的成像,需要针对有限远距离成像的特性来设计龙虾眼成像系统的光学结构。
本文针对有限远物距、高集光效率的X 射线成像需求,构建了Schmidt 型龙虾眼光学系统的设计与仿真模型,依据放大倍率、焦距、光学元件厚度及间距等对系统集光效率的影响以及物像关系与像散的关联,设计了高集光效率、高分辨率的Schmidt 型龙虾眼光学系统。在此基础上,通过光线追迹对系统成像进行了仿真,并通过X 射线成像实验检验系统的成像性能,结果显示,实测分辨率与仿真结果基本一致。本文的研究为龙虾眼型X 射线成像系统的设计提供了一种有效的方法,对于X射线成像方面的科研和教学研究具有重要的意义。
1 Schmidt型龙虾眼系统工作原理
对于应用于X射线天文领域的龙虾眼(LE)式望远镜,由于物体位于无限远处(x = ∞),球差占主导地位。而对于有限距离物体的探测,物距与龙虾眼物镜的半径为同一量级,像散占主导。图1 所示为有限物距龙虾眼物镜的几何构型。A 为点源,A′为该点源的像,C为曲率中心,连接AC 的局部光轴。A 到B 为连续物体,A′B′为其连续像,B′为B的像,局部光轴连续。该龙虾眼物镜采用重叠型复眼构型,反射镜与像面之间存在间隔,每个反射通道的成像在像面上叠加。

图1 龙虾眼光学系统成像原理
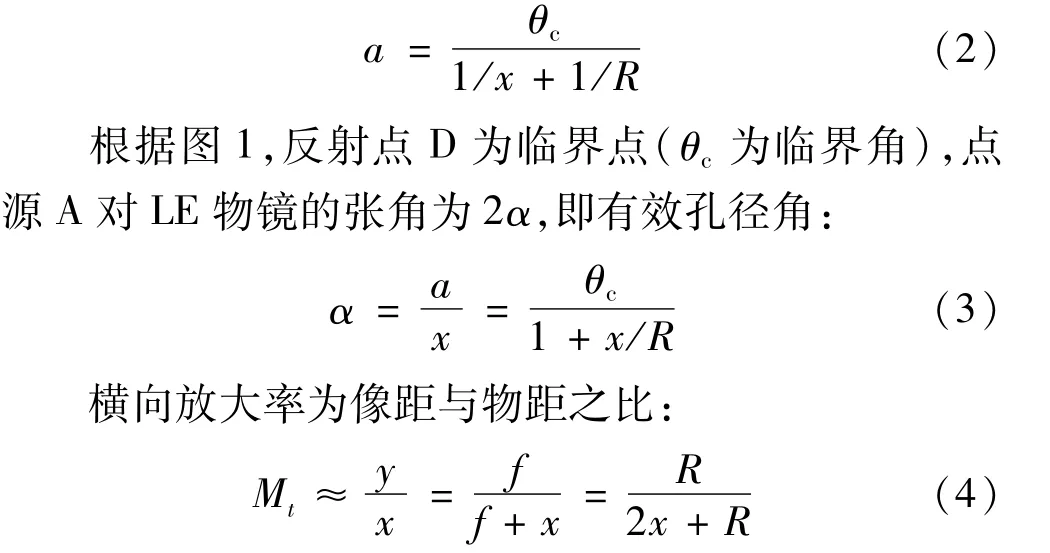
龙虾眼光学系统的成像公式为:

式中,焦距f = R / 2。由θc= α + φ可以推出,LE物镜的几何半孔径:
2 Schmidt型龙虾眼系统光学设计
2.1 集光效率仿真模型
龙虾眼物镜的物方集光效率由物方孔径η1和物镜对入射光线的反射效率η2决定,即

式中:sum 为被聚焦的光线数;N 为入射到LE 物镜前的光线数。
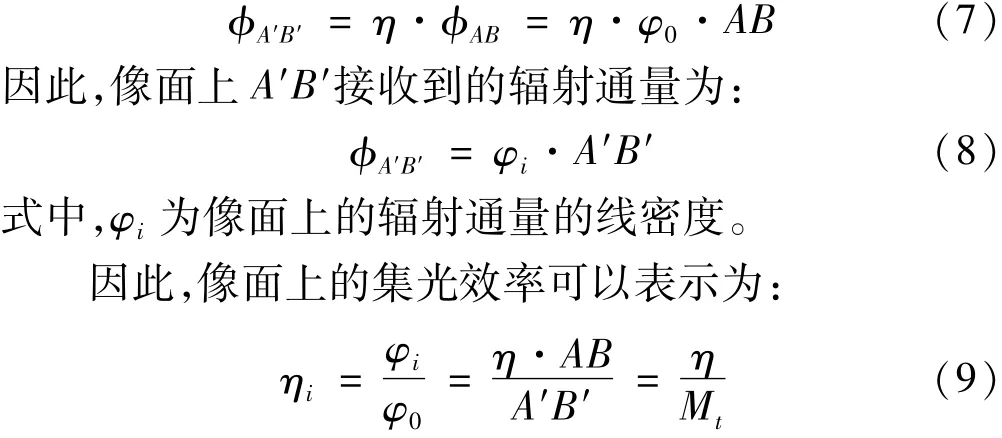
物面上AB段的辐射通量为:

式中:dho为物面上的点源的线度;φ0为物面上辐射通量的线密度。
通过LE光学系统抵达像面的辐射通量为:
2.2 结果及分析
基于集光效率的仿真模型,利用光线追迹计算了龙虾眼物镜的集光效率,见表1、2。表1、2 数据均在入射光子能量为60 keV、掠入射临界角为0.083°(表面镀制Ir单层反射薄膜)条件下计算得到的。
当放大率恒定时,物距变化对集光效率的影响,见表1。放大率Mt= 1 时,镜片排布半径R = ∞,镜片互相平行。焦距f = 1 m,镜片组半径r = 2 m,放大率变化对集光效率的影响见表2。表1、2 的结果说明,当LE物镜工作在不同的物距和放大倍率时,集光效率存在极优值。在物镜设计时,需根据这些值来选择合适的反射镜参数(厚度及间距)。对于放大倍率恒定为1时,若物镜的物距较大,可供选择的镜面间距就较多。例如,对于物距1.0 m和放大率1 的物镜,集光效率存在4 个极值,对应的镜面间距分别为104.5、184.9、345.7、699.7 μm。对于这4 个极值,镜面间距较大的系统集光效率较低。在实际设计及研制中,除了参考集光效率的极值,还要考虑LE 物镜的视场、反射镜的厚度及制作难度、装配等问题。表3 为根据仿真结果设计的Schmidt型龙虾眼系统的光学结构。
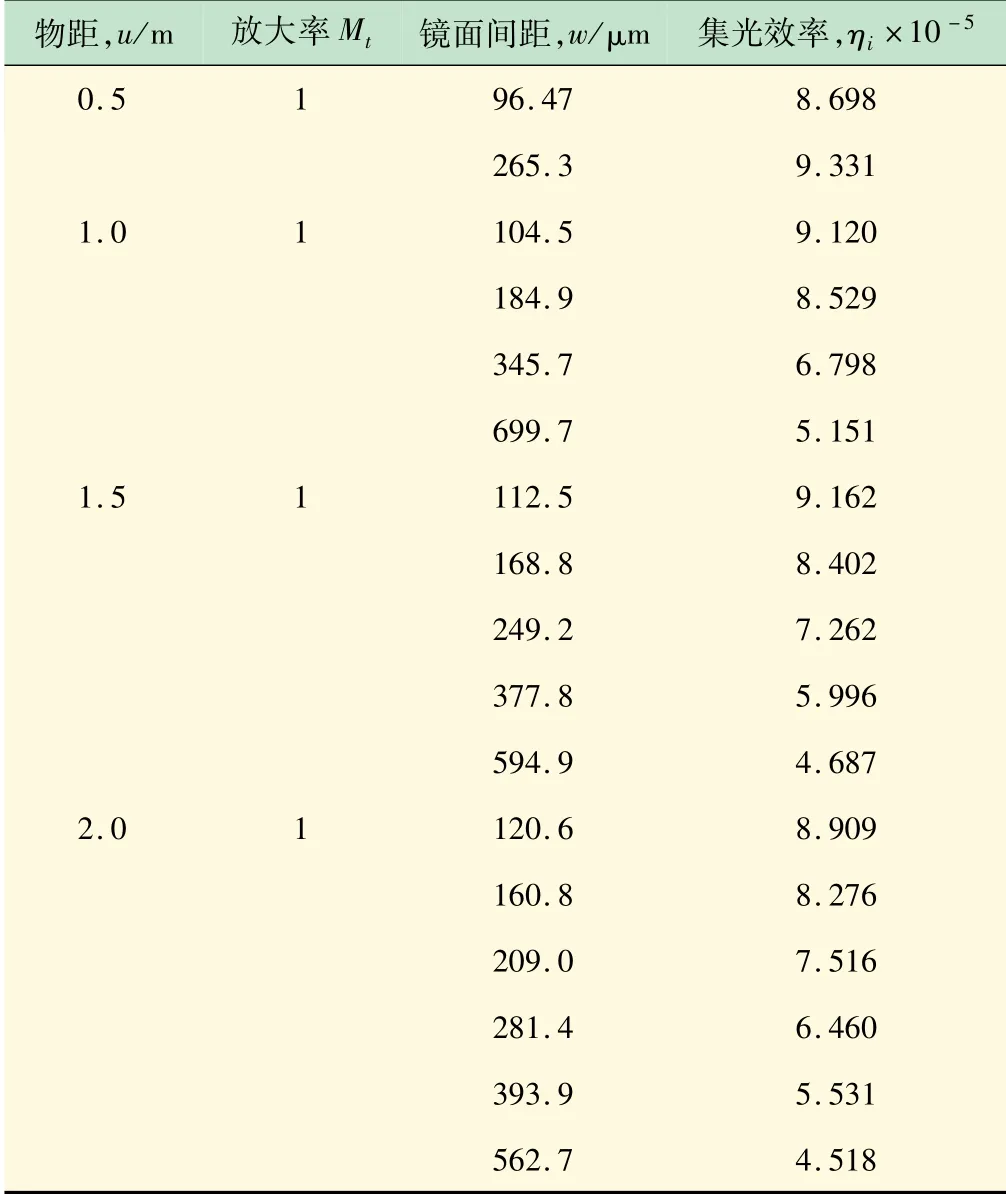
表1 Mt =1 时,不同物距下集光效率的极优值及相应的镜片间距
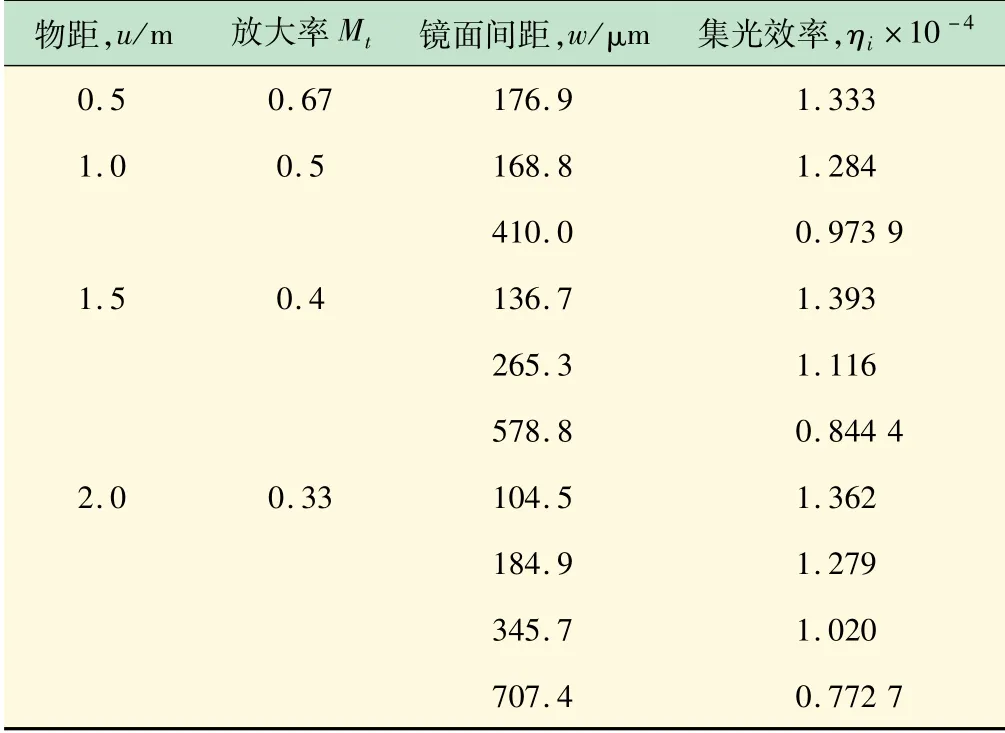
表2 f =1 m时,不同物距下集光效率的极优值及相应的镜片间距
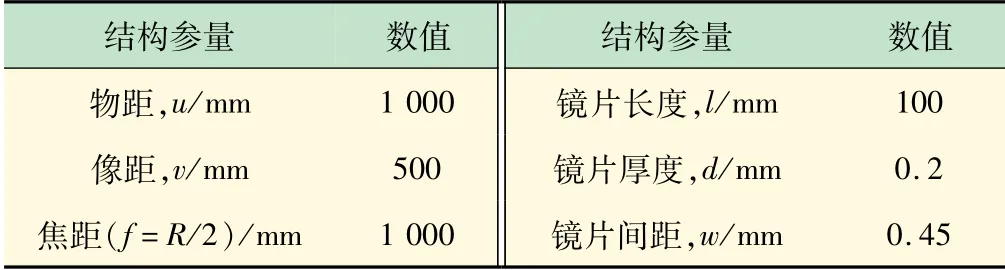
表3 Schmidt型龙虾眼物镜结构的设计参数
3 系统成像仿真
根据上述参数,运用光线追迹,对龙虾眼物镜进行成像模拟。图2(a)为对点源的成像,得到像面上的“十字”型光线分布,图2(b)为像面上的强度分布。由图像可得,成像存在较明显的像散,表现为竖直方向的弥散比水平方向严重。因此,像面分布上两条正交的一维聚焦的亮线比较宽,且没有汇聚在同一点。图2(c)、(d)为龙虾眼物镜对字母“F”的成像模拟结果,字母“F”的尺寸为4 mm × 3 mm。可以看出,由于像散的存在,字母“F”的清晰度较差,难以分辨。
为解决像散的问题,第2 组物镜的焦距需要比第1 组物镜小一些,以保证前后两组物镜的像面互相重合。根据龙虾眼物镜的设计,物距u1= 1 m,像距v1=500 mm,将第2 组物镜紧贴第1 组物镜出瞳面放置,因此第2 组物镜的物距u2= 1.1 m,像距为v2= 400 mm。根据龙虾眼光学系统物像公式:

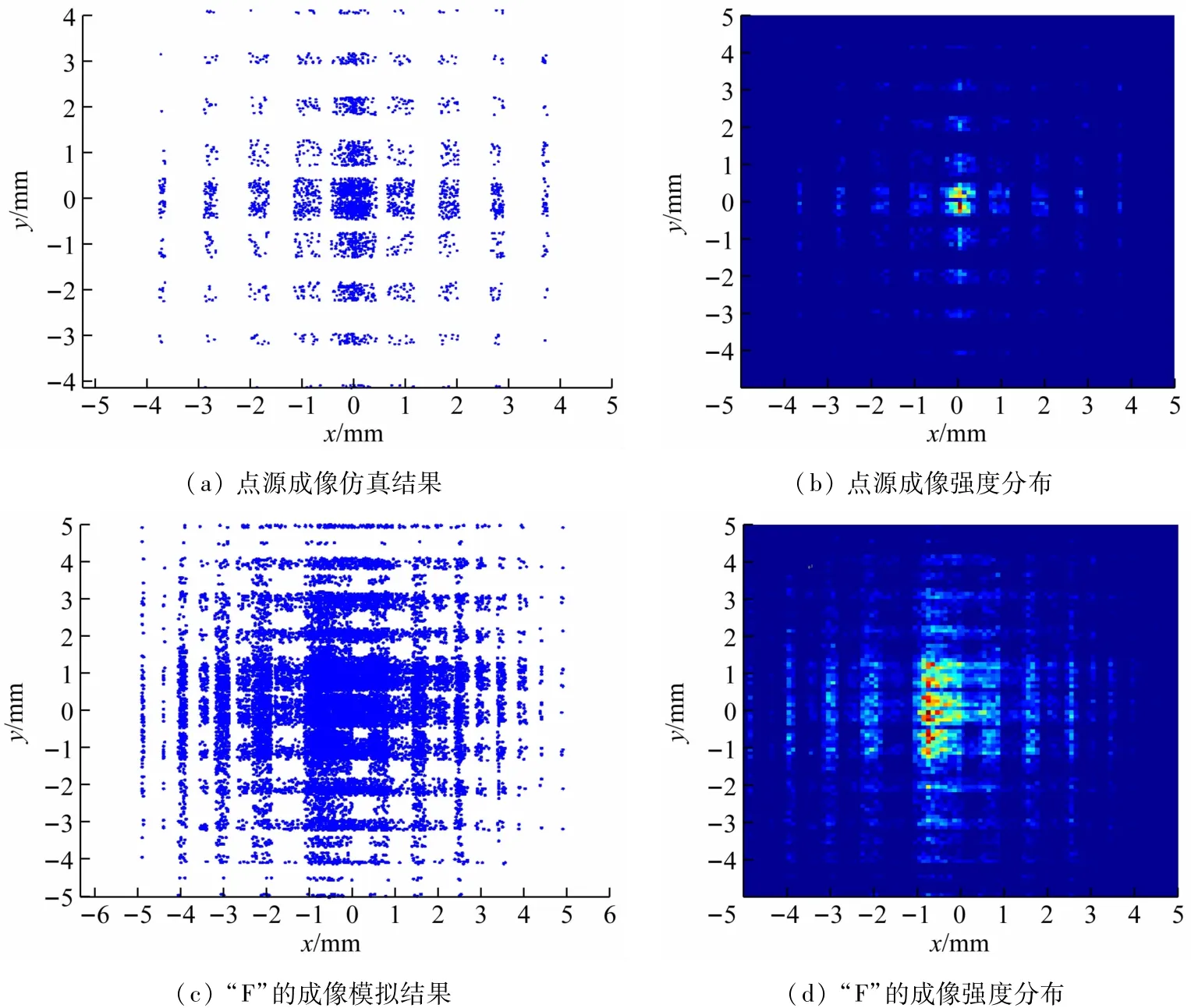
图2 Schmidt型龙虾眼物镜成像仿真结果
式中,f = R / 2。将第2 组物镜的物像距代入式(10),得到R2= 1.26 m,经过优化的物镜物像关系示意图如图3 所示,结构参数见表4。通过调整两个物镜的焦距解决像散问题的方法,会导致子午面与弧矢面内的放大率不一致。根据式(4),第1 组物镜对应的子午方向的横向放大率为0.5,而第2 组物镜对应的弧矢方向的横向放大率为0.36。
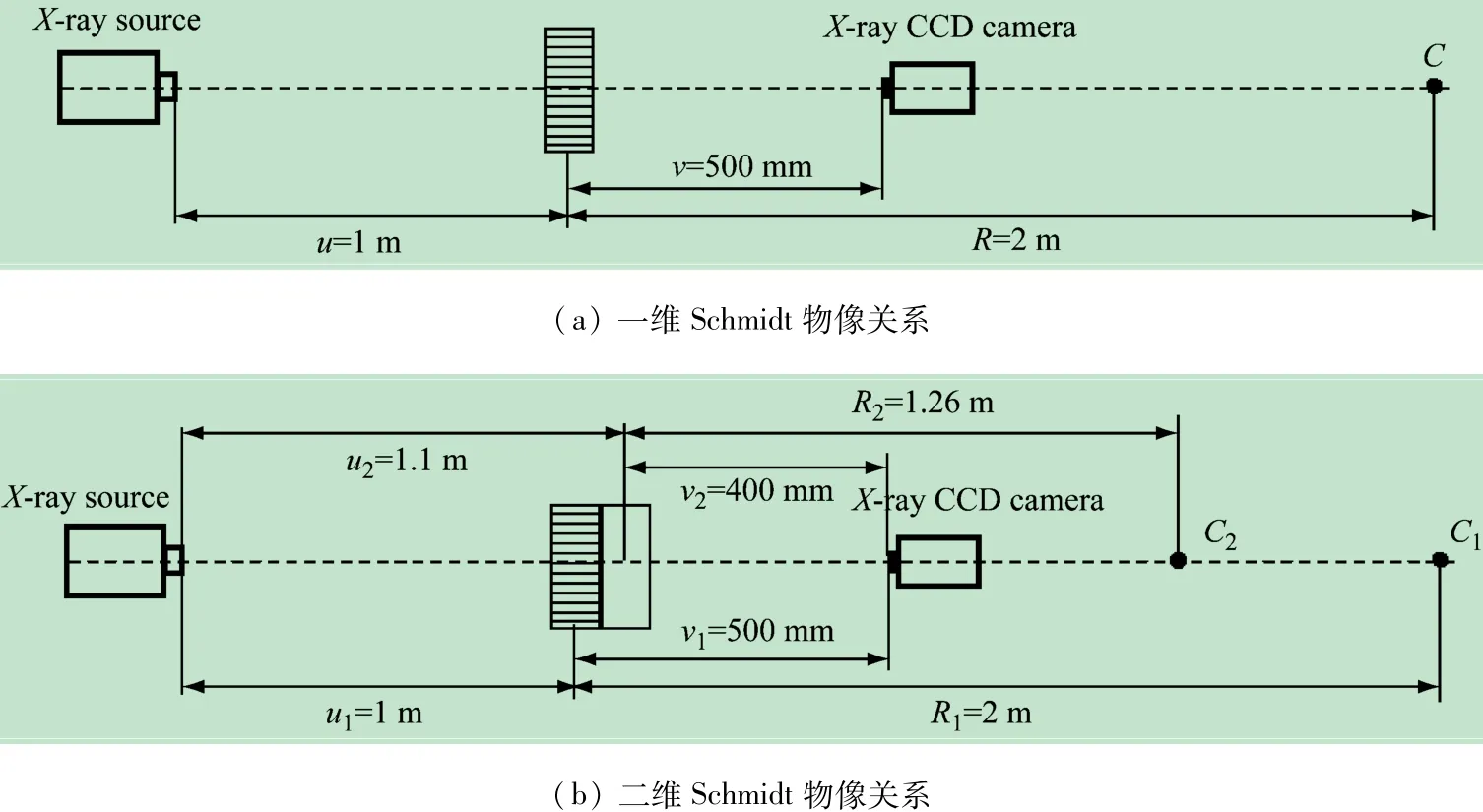
图3 像散优化后Schmidt型龙虾眼物镜物像关系
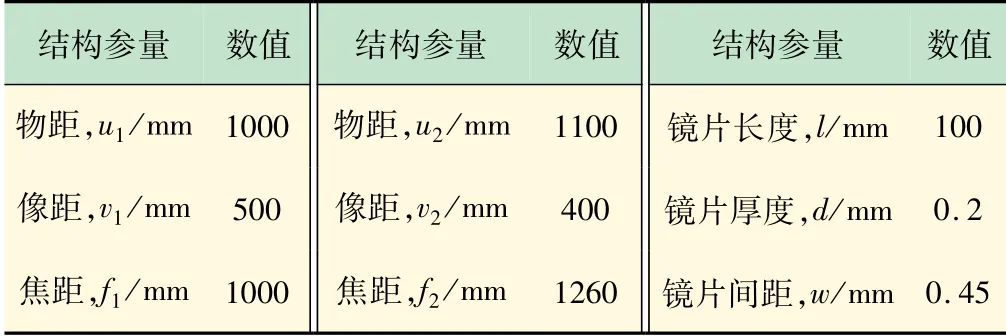
表4 像散优化后Schmidt型龙虾眼物镜结构参数
图4 所示为经过优化的物镜模拟结果。由图4 可见,与由两个完全相同的物镜组成的龙虾眼光学系统相比,像散得到了明显的改善,中央亮斑的尺寸也更小,对比度更清晰。
图5 所示为物镜对字母“F”的成像模拟,字母的尺寸为4 mm × 3 mm,成像清晰,字母能够清楚分辨,水平方向的放大率为0.36,比竖直方向略小。对字母“F”强度分布的图像处理结果显示,能够清晰地分辨出成像的字母的形状,空间分辨率约为1 mm。
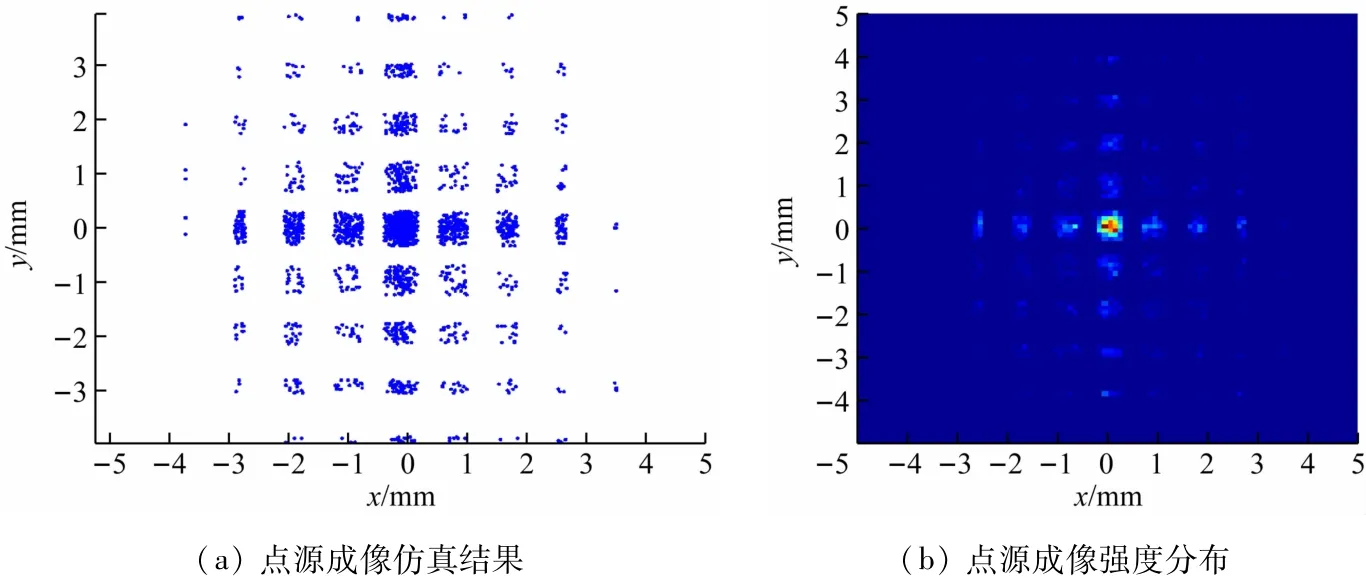
图4 像散优化后Schmidt型龙虾眼物镜成像仿真
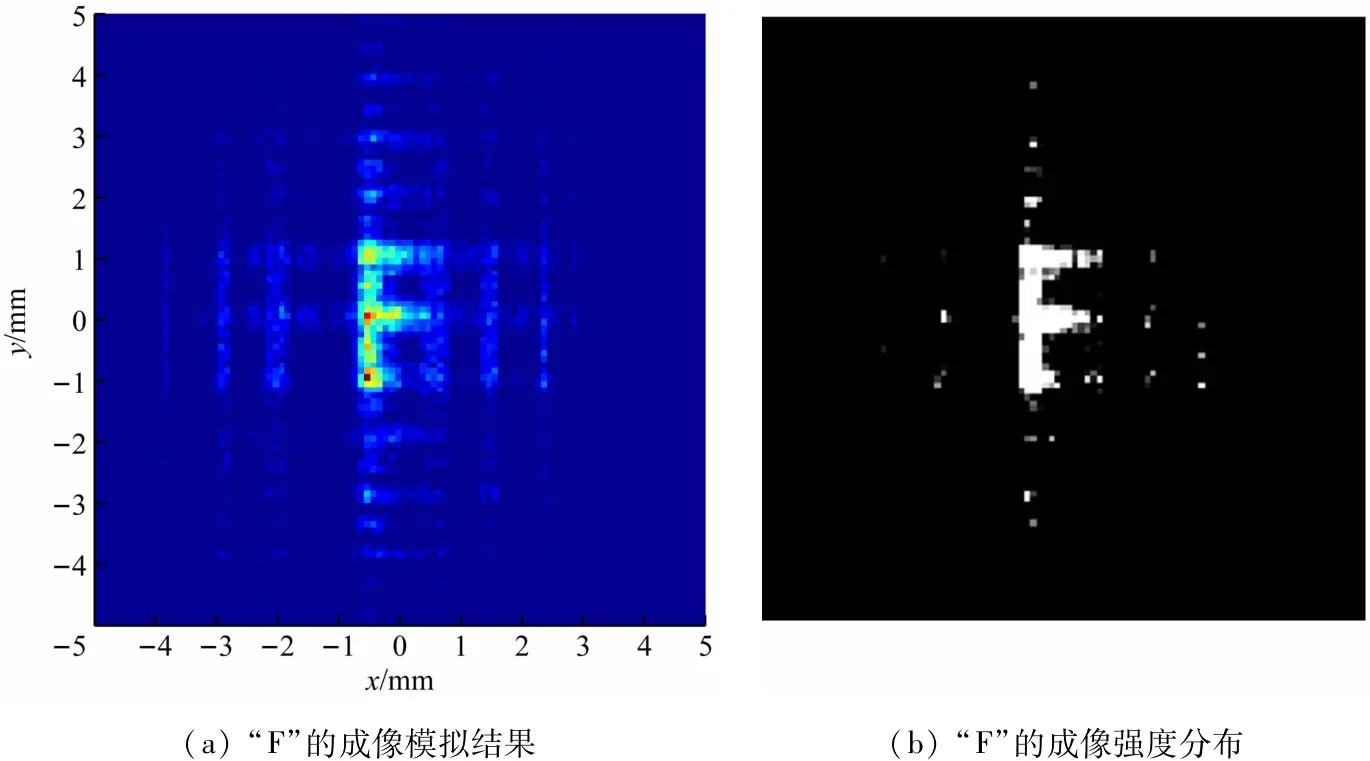
图5 像散优化后龙虾眼物镜对字母“F”的成像模拟
4 分辨率检验
根据结果研制了一套Schmidt 型X 射线成像系统,如图6(a)所示。系统的光学元件采用超光滑D263 玻璃,厚度为0.2 mm,镜片的表面粗糙度RMS值为0.3 nm。研制的成像系统的参数见表4。分辨率的检验在X射线成像实验平台上开展,采用透射的成像方式来检验系统分辨率。物体是直径为1 mm的圆形孔,位于Schmidt系统的物点位置,采用钨靶X射线光源背光照明该物孔,物孔经Schmidt 系统成像在X射线探测器的像面。
实验采用钨靶X射线光源,工作电压为50 kV,电流为2 mA。探测器的增益为1,积分时间为10 s。图6(b)为直径1 mm 的圆孔经过该系统成像的结果,由图可见孔的图像亮度高,且形状变形很小。利用X 射线成像领域常用的空间分辨率评价方法,即10% ~90%标准,得到成像的空间分辨率约1 mm,这与仿真的结果基本一致。
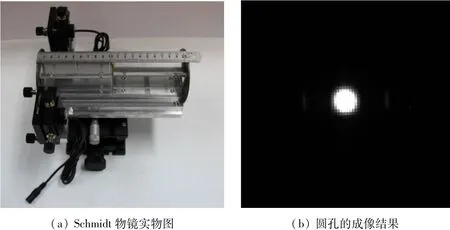
图6 Schmidt型龙虾眼物镜实物图及圆孔的成像结果
5 结 语
本文围绕有限远物距、高集光效率的X 射线成像需求,开展了Schmidt 型龙虾眼成像系统的光学设计与仿真研究。构建了Schmidt 型龙虾眼光学系统的集光效率仿真模型,研究了放大倍数、焦距、光学元件厚度及间距等光学结构参数对系统集光效率的影响。通过光线追迹对龙虾眼物镜的成像进行了仿真,分析了物像关系与像散的关联,校正了系统的像散。根据仿真结果,研制了高集光效率、高分辨率的Schmidt 型龙虾眼光学系统,LE 物镜消除了像散对成像性能的影响,实现了约1 mm的空间分辨率成像。
猜你喜欢
桂林电子科技大学学报(2022年3期)2022-10-26
现代电子技术(2022年18期)2022-09-17
科学技术创新(2021年25期)2021-09-11
锦绣·上旬刊(2020年3期)2020-06-08
中国医疗设备(2019年1期)2019-01-15
理科考试研究·初中(2018年10期)2018-12-11
艺海(2018年3期)2018-05-17
教学考试(高考生物)(2017年4期)2017-12-13
中学物理·初中(2017年4期)2017-05-31
中学生数理化·八年级物理人教版(2015年11期)2015-11-30