
关于一种自动紧急制动技术的设计研究
2020-11-23 01:58苏宇鹏钱涛杨威张译丹辛江慧
汽车实用技术 2020年20期
苏宇鹏 钱涛 杨威 张译丹 辛江慧

摘 要:驾驶过程中行车安全是至关重要的。文章从AEB系统的前车探测系统、多数据融合算法、制动执行机构等方面,介绍AEB系统的制动解决方案及其分类。总结了ABE系统在车辆中的有效应用。
关键词:紧急制动;躲避碰撞;执行机构
中图分类号:U463.5 文献标识码:B 文章编号:1671-7988(2020)20-57-04
Abstract: Driving safety is very important during driving. This paper introduces the braking solution and its classification of AEB system from the front vehicle detection system, multi data fusion algorithm, brake actuator, etc. The effective application of Abe system in vehicle is summarized.
Keywords: Emergency braking; Collision avoidance; Actuator
CLC NO.: U463.5 Document Code: B Article ID: 1671-7988(2020)20-57-04
前言
根據Euro NCAP定义,当汽车感知到即将发生碰撞时,系统自动进行制动来降低车速,并避免可能的碰撞,称为自动紧急制动(AEB)[1]。自动紧急制动可有效避免追尾事故的发生,是目前行车安全的技术热点。
随着我国国民经济水平逐年提高,汽车数量井喷式增长,但交通事故也随之增加。当行车遇到前方突然出现障碍时,司机有时会在慌乱中未能及时制动,导致交通事故的发生。2012全年,在交通事故中有604起是因制动不当造成,直接财产损失667万元[2]。本文概述AEB系统的前车探测系统、多数据融合算法、制动执行机构等方面,对AEB系统在行车安全中的作用做出总结。
1 自动紧急制动(AEB)系统
根据Euro NCAP统计,在城市中最经常发生的交通事故,往往是两车处在较低的相对车速下,前车已经停止而后车继续行驶与之追尾碰撞。这种碰撞方式超过总碰撞方式的25%[3]。在高速上,当司机分心或者没能辨别出前方车辆已经停止或减速行驶时,类似的追尾碰撞常常会发生。AEB系统是一种主动安全技术,可通过主动采取紧急制动来缓解或避免与前车相撞,属于汽车安全辅助装置(Car Safety Assist Assessment)的一种。
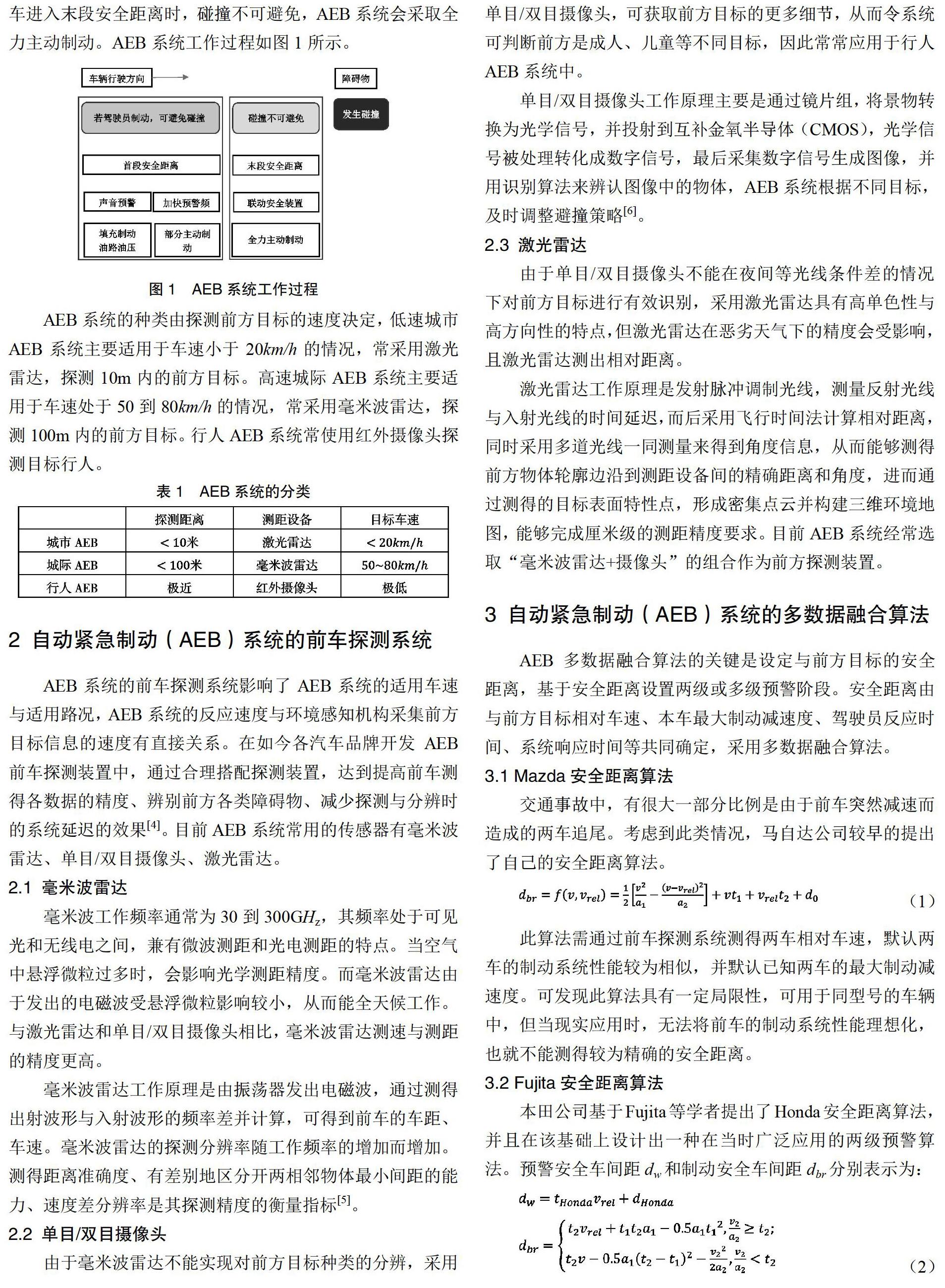
AEB系统的功能由前车探测系统、多数据融合算法、制动执行机构共同实现。常见的AEB系统通过毫米波,激光,摄像头等探测方式采集前方目标信息,将信息传输至车辆ECU,ECU根据设定的避撞策略实时计算出与前方车辆的安全距离。通常安全距离分为两段,当汽车进入首段安全距离时,若驾驶员采取最大制动力,可避免碰撞。AEB系统会通过发出声音或等方式向驾驶员发出前方碰撞预警(Forward Collision Warning),并预先填充制动油路油压以在需要制动时提供更大的制动力。若驾驶员对预警不予理睬时,系统会加快预警频率,并通过点刹等形式进行部分主动制动。当汽车进入末段安全距离时,碰撞不可避免,AEB系统会采取全力主动制动。AEB系统工作过程如图1所示。
AEB系统的种类由探测前方目标的速度决定,低速城市AEB系统主要适用于车速小于20km/h的情况,常采用激光雷达,探测10m内的前方目标。高速城际AEB系统主要适用于车速处于50到80km/h的情况,常采用毫米波雷达,探测100m内的前方目标。行人AEB系统常使用红外摄像头探测目标行人。
2 自动紧急制动(AEB)系统的前车探测系统
AEB系统的前车探测系统影响了AEB系统的适用车速与适用路况,AEB系统的反应速度与环境感知机构采集前方目标信息的速度有直接关系。在如今各汽车品牌开发AEB前车探测装置中,通过合理搭配探测装置,达到提高前车测得各数据的精度、辨别前方各类障碍物、减少探测与分辨时的系统延迟的效果[4]。目前AEB系统常用的传感器有毫米波雷达、单目/双目摄像头、激光雷达。
2.1 毫米波雷达
毫米波工作频率通常为30到300GHz,其频率处于可见光和无线电之间,兼有微波测距和光电测距的特点。当空气中悬浮微粒过多时,会影响光学测距精度。而毫米波雷达由于发出的电磁波受悬浮微粒影响较小,从而能全天候工作。与激光雷达和单目/双目摄像头相比,毫米波雷达测速与测距的精度更高。
毫米波雷达工作原理是由振荡器发出电磁波,通过测得出射波形与入射波形的频率差并计算,可得到前车的车距、车速。毫米波雷达的探测分辨率随工作频率的增加而增加。测得距离准确度、有差别地区分开两相邻物体最小间距的能力、速度差分辨率是其探测精度的衡量指标[5]。
2.2 单目/双目摄像头
由于毫米波雷达不能实现对前方目标种类的分辨,采用单目/双目摄像头,可获取前方目标的更多细节,从而令系统可判断前方是成人、儿童等不同目标,因此常常应用于行人AEB系统中。
单目/双目摄像头工作原理主要是通过镜片组,将景物转换为光学信号,并投射到互补金氧半导体(CMOS),光学信号被处理转化成数字信号,最后采集数字信号生成图像,并用识别算法来辨认图像中的物体,AEB系统根据不同目标,及时调整避撞策略[6]。
2.3 激光雷达
由于单目/双目摄像头不能在夜间等光线条件差的情况下对前方目标进行有效识别,采用激光雷达具有高单色性与高方向性的特点,但激光雷达在恶劣天气下的精度会受影响,且激光雷达测出相对距离。
