
应用于大学生方程式赛车的ABS系统控制策略
2020-11-23 01:58李建华孙世伦马英通张文奇刘轶材张飞
汽车实用技术 2020年20期
李建华 孙世伦 马英通 张文奇 刘轶材 张飞
摘 要:ABS/EBD系统是如今极为重要且常见的主动安全装置,但在FSAE赛车上的应用极少。为了提高FSAE赛车的制动效能和制动稳定性,响应大学生方程式汽车大赛的创新性宗旨,吉林大学吉速电动方程式车队自主设计了适用于FSAE赛车的ABS/EBD系统。文章基于FSAE赛车设计了ABS系统的控制策略并搭建了控制模型,仿真试验表明所设计的控制策略进行取得了很好的效果,大大缩短了制动距离。
关键词:ABS控制策略;FSAE;逻辑门限值
中图分类号:U461.3 文献标识码:A 文章编号:1671-7988(2020)20-83-04
Abstract: ABS/EBD system is a very important and common active safety device nowadays, but it is rarely used in FSAE racing. In order to improve the braking efficiency and braking stability of FSAE racing, response to the innovative purpose of FSAE-China, Jilin University Gspeed Electic Formula Racing Team of Jilin University has independently designed the ABS/EBD system suitable for FSAE racing. In this paper, the control strategy of ABS system is designed and the control model is built based on FSAE racing, the simulation results show that the control strategy is effective, greatly shorten the braking distance.
Keywords: ABS control logic; FSAE; Logical threshold
CLC NO.: U461.3 Document Code: A Article ID: 1671-7988(2020)20-83-04
1 引言
目前國外ABS相关技术日益成熟,博世公司在2015年发布了第十代ABS产品,现乘用车多使用的也是博世公司研发的第八代ABS产品。反观国内,对ABS系统的研究起步较晚,从总体来看,国内的研究水平相较国外还存在一定差距。
ABS发展至今,国内外学者已对其控制算法进行了很多理论研究,目前主流的控制方法有PID控制、滑动模态变结构控制、最优控制、神经网络控制、模糊控制、耗散功率控制、逻辑门限值控制[1]。相较之下,逻辑门限值控制理论基础完备,控制过程相对简单易实现,响应迅速控制效果理想。并且,逻辑门限值控制需要采集的信息量少,对压力调节装置要求低,成本低,可靠性高[2]。因此,逻辑门限值控制是适于FSAE赛车的首选控制方法。
2 ABS控制原理
2.1 ABS控制原理
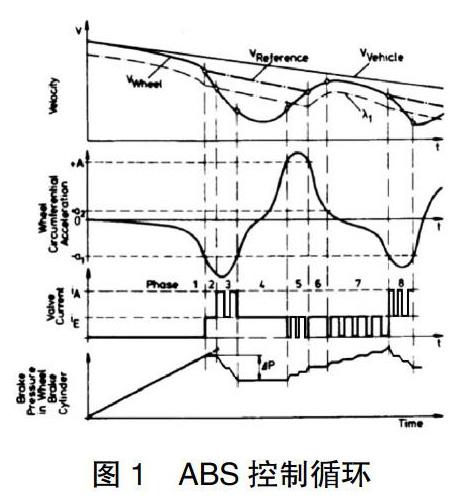
下面将介绍一种车轮角加速度辅助参考滑移率的逻辑门限值控制方法,这种控制方法响应迅速,且控制效果能很好地满足预期,是以BOSCH公司最早提出的控制逻辑为原型,并在其基础上改进得来的。一个完整的控制循环过程如图1所示:
图中VVehicle为车速,VReference为参考车速,VWheel为轮速,λ1为比例系数(当VWheel =λ1×VReference时参考滑移率达到预设值),-a1、+a2、+A为车轮角加速度的三个门限值,iE表示常开阀处于动作状态,iA表示常闭阀处于动作状态。当车辆紧急制动时,车轮角加速度为负值且随制动油压的增加而减小,在某一时刻降至预设的门限值-a1,开始进入ABS控制。为避免车轮在稳定区间内过早进入减压状态,导致最佳滑移率区间利用不充分,加入参考滑移率。若参考滑移率小于预设值,即VWheel >λ1×VReference,说明车轮尚处在稳定区间,ABS保压,以使车轮充分制动;否则,说明车轮处于峰值附着系数附近的不稳定区间,ABS阶梯减压,以保证合理的减压速率使系统工作平顺。由于减压,车轮角加速度逐步回升至-a1,ABS保压。由于车轮自身存在惯性且此时制动油压较小,车轮角加速度持续回升,直到达到预设的门限值+a2;若在给定的保压时间内车轮角加速度始终不能超过+a2,说明此时路面附着系数较低,ABS阶梯减压,以使车轮角加速度达到预设的门限值+a2。继续保压会出现两种情况:一是车轮角加速度超达到预设的门限值+A,ABS阶梯增压,直到降回+A,ABS保压;二是车轮角加速度达到峰值后下降且没有达到+A。两种情况的最终结果都是车轮角加速度再次降至+a2,车轮处于稳定区间的最佳滑移率区间,ABS阶梯增压,以使车轮尽量长时间处在稳定区间,充分利用最佳滑移率区间,直至车轮角加速度再次降至-a1。到此,一个完整的控制循环结束。
3 ABS控制逻辑
3.1 ABS硬件部分
对于此ABS系统的硬件部分,选用三通道的液压控制单元。两个前轮为转向轮,独立控制;两个后轮为驱动轮,按低选原则同步控制。独立控制两前轮可以保证制动中赛车始终保持良好的横向附着,有利于快速过弯提高圈速;并且可以使赛车获得尽可能大的总制动力,有利于缩短刹车距离。按低选原则同步控制两后轮可以保证路面附着系数左右分离的情况下,两后轮制动力始终相等,避免产生较大的横摆力矩,增强了赛车的操纵稳定性和方向稳定性。
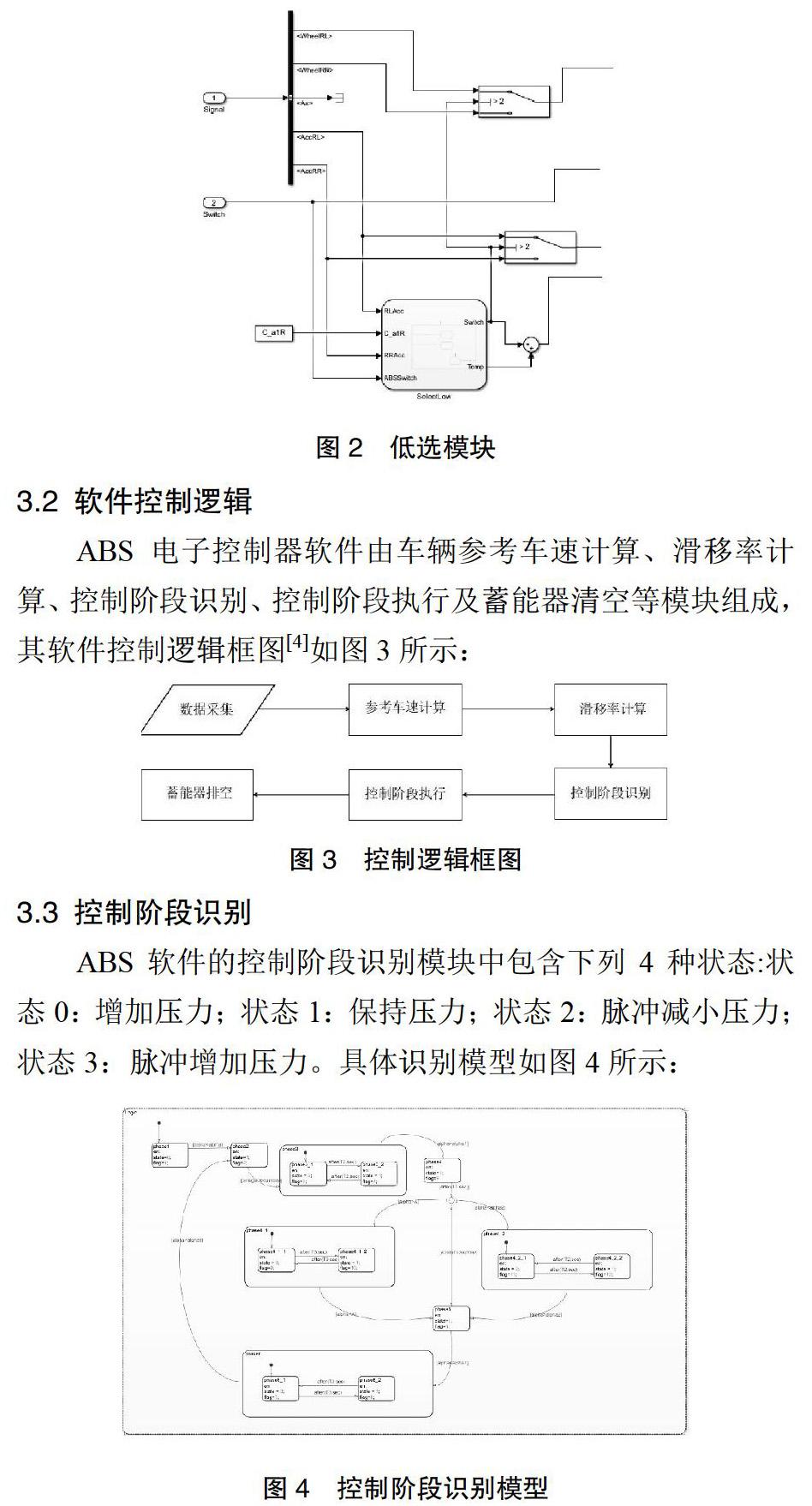
由于此ABS系统按低选原则同步控制两后轮,要在进入ABS控制前对两后轮的角加速度判断,选择率先触发ABS工作门限(a<-a1)车轮的角速度及角加速度作为控制输入参与控制实现。模块如图2所示:
3.2 软件控制逻辑
ABS电子控制器软件由车辆参考车速计算、滑移率计算、控制阶段识别、控制阶段执行及蓄能器清空等模块组成,其软件控制逻辑框图[4]如图3所示:
3.3 控制阶段识别
ABS软件的控制阶段识别模块中包含下列4种状态:状态0:增加压力;状态1:保持压力;状态2:脉冲减小压力;状态3:脉冲增加压力。具体识别模型如图4所示:
将ABS软件的控制阶段识别模块分成以下几个阶段:
阶段1:触发-a1门限,进入ABS,未觸发滑移率门限,ABS保压。触发滑移率门限,退出阶段1。
阶段2:触发滑移率门限,ABS阶梯减压。再次触发-a1门限,退出阶段2。
阶段3:再次触发-a1门限,ABS保压。在给定的保压时间后退出阶段3。
阶段4:对给定保压时间后的车轮角加速度进行判断,将出现三种情况;
(i)触发+A门限,ABS阶梯增压,再次触发+A门限,ABS保压。触发+a2门限,退出阶段4。
(ii)触发+a2门限但未触发+A门限,ABS保压。再次触发+a2门限,退出阶段4。
(iii)未能触发+a2门限,ABS阶梯减压,当触发+a2门限后,ABS保压。触发+a2门限,退出阶段4。
阶段5:触发+a2门限,ABS阶梯增压。触发-a1门限,退出阶段5。
3.4 控制阶段执行
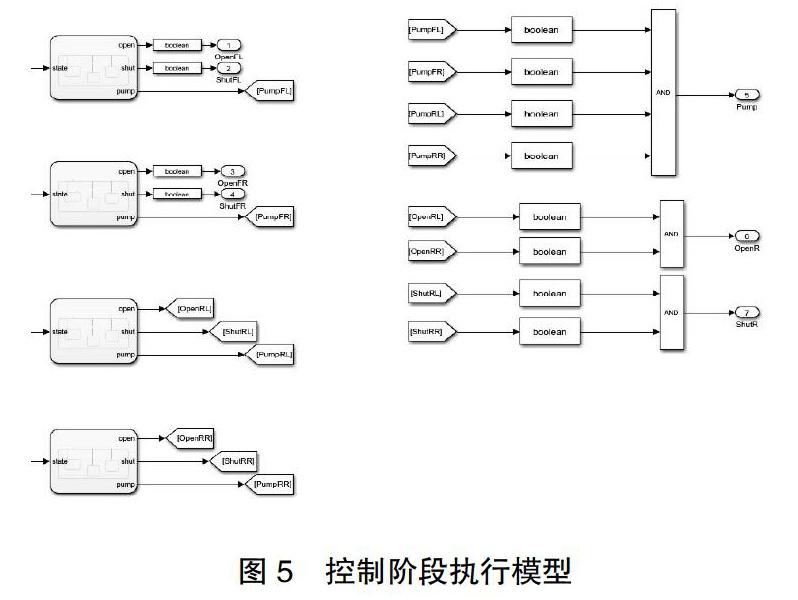
ABS软件的控制阶段识别模块将输出电磁阀的动作状态,1代表动作,0代表不动作。控制阶段执行模块接受并判断电磁阀动作状态,执行保压、阶梯增压、阶梯减压动作。控制阶段执行模型如图5所示。
状态0的执行:常开阀打开,常闭阀关闭,制动油压线性增加。
状态1的执行:常开阀关闭,常闭阀关闭,制动油压保持。
状态2的执行:常开阀持续关闭,常闭阀脉冲通电,液压泵工作,制动液经蓄能器泵回制动主缸,制动油压阶梯下降。
状态3的执行:常开阀脉冲通电,常闭阀持续关闭,制动油压阶梯增加。
蓄能器排空的执行:常开阀关闭,常闭阀打开,此时蓄能器中的油压高于制动主缸中的油压,在压差的作用下,制动液经单向阀流回制动主缸,蓄能器排空。
3.5 ABS控制监视
为监视ABS控制实现过程中的工作状态及参考车速计算,获得一次ABS控制中的全部控制循环及控制循环内各控制阶段实现情况,在ABS控制逻辑中设立两个标志位变量ABSFlag、ABSFlag1分别表征ABS工作状态和参考车速计算。
标志位变量ABSFlag有13个状态标号,“0”表示ABS未启动时的常增压状态;“1”表示ABS结束后的蓄能器排空状态;“2”表示ABS控制阶段1的长保压状态;“3”表示ABS控制阶段2的减压状态;“4”表示ABS控制阶段2的短保压状态;“5”表示ABS控制阶段3的长保压状态;“6”表示ABS控制阶段4的长保压状态;“7”表示ABS控制阶段5的增压状态;“8”表示ABS控制阶段5的短保压状态;“9”表示ABS控制阶段4(i)的增压状态;“10”表示ABS控制阶段4(i)的短保压状态;“11”表示ABS控制阶段4(iii)的减压状态;“12”表示ABS控制阶段4(iii)的短保压状态。
标志位变量ABSFlag1有3个状态标号,“0”表示ABS未启动时以最大轮速法计算参考车速;“1”表示ABS工作时以斜率法计算参考车速;“10”表示ABS工作时以最大轮速法计算参考车速。
4 ABS控制模型仿真测试
4.1 模型在环仿真
在Simulink中搭建ABS控制模型,在Carsim中搭建轮胎、整车及路面模型。Simulink-Carsim联合仿真,仿真过程中,汽车以80km/h的初速度在μ=0.7(阴雨天气,雨胎与湿滑赛道间附着系数约为0.7)的平直路面上紧急制动。仿真获得轮速、车速及制动距离和时间等信号,仿真结果如图6、表1所示:
联合仿真结果显示,此ABS控制模型基本满足控制功能的要求,车轮有效防抱死,且控制效果较为理想,制动距离及时间缩短近5%。
更改仿真条件,固定赛车方向盘转角45°,使赛车以60km/h的初速度在μ=1.4(晴天良好附着,热熔胎与赛道间附着系数约为1.4)的路面上行驶,然后进入紧急制动工况。仿真获得赛车最大侧向加速度,与无ABS系统结果对比,实验结果列于表2:
仿真结果显示,此ABS系统可以有效提高赛车的操纵稳定性,最大侧向加速度提高近0.09g。
4.2 驾驶员在环测试
在19赛季吉林大学吉速电动方程式赛车中搭载ABS系统所需硬件及控制效果良好的程序代码,在租借的ABS专用测试场地进行调校与测试,输出轮速、车轮角加速度、电磁阀工作状态等数据,数采结果如下图所示:
其中“WheelRpmFR”表示前右轮轮速,“FRAcc”表示前右轮角加速度,“ABSFlagFR”表示前右轮控制实现过程中的标志位变量ABSFlag,“ABSFlag1FR”表示前右轮控制实现过程中的标志位变量ABSFlag1。测试结果显示,此ABS系统控制功能基本满足预期期望,控制效果较为理想。
参考文献
[1] 马付雷.汽车ABS逻辑门限值控制算法研究与实现[D].重庆:重庆邮电大学硕士学位论文.2011.
[2] 邹素瑞.客车防抱死系统控制器的研究[D].同济大学,2007.
[3] 郑太雄,单荣明,蒋国英,杨勇.汽车ABS参考车速的确定方法[J].汽车技术,2010(03):37-40.
[4] 王志煌.汽车液压制动系统前后桥制动力分配的电子控制[J].汽车研究与开发,2002(03):1-7+17.
