
某轿车转向传动系统的波动分析及优化
2020-11-23 01:58杨飞杨钧浩
汽车实用技术 2020年20期
杨飞 杨钧浩

摘 要:汽车转向过程中,转向波动直接影响驾驶员操作稳定性和驾驶舒适性。文章主要介绍了某轿车转向传动系统的建模分析相关的方法、模型的优化及仿真结果,在Adams/View环境中通过已给硬点坐标建立转向传动系统模型,进行运动仿真、获取相关数据并分析其波动性能。
关键词:转向系统;波动分析;动力学仿真
中图分类号:U463.4 文献标识码:A 文章编号:1671-7988(2020)20-104-03
Abstract: During car steering, steering fluctuations directly affect the driver's operating stability and driving comfort. This article mainly introduces the methods, optimization and simulation results of a car's steering transmission system modeling and analysis. In the Adams / View environment, the steering transmission system model is established by giving hard point coordinates to perform motion simulation, obtain relevant data and Analyze its fluctuation performance.
Keywords: Steering system; Wave analysis; Dynamic simulation
CLC NO.: U463.4 Document Code: A Article ID: 1671-7988(2020)20-104-03
前言
在汽車转向过程中,转向波动直接影响着驾驶的舒适性和操作稳定性。在对汽车转向操纵系统进行布置时,需要考虑转向输入轴、中间轴、输出轴的布置,合理设定主从动轴间的夹角以及万向节叉的相位角,使波动的影响降到最低[1]。
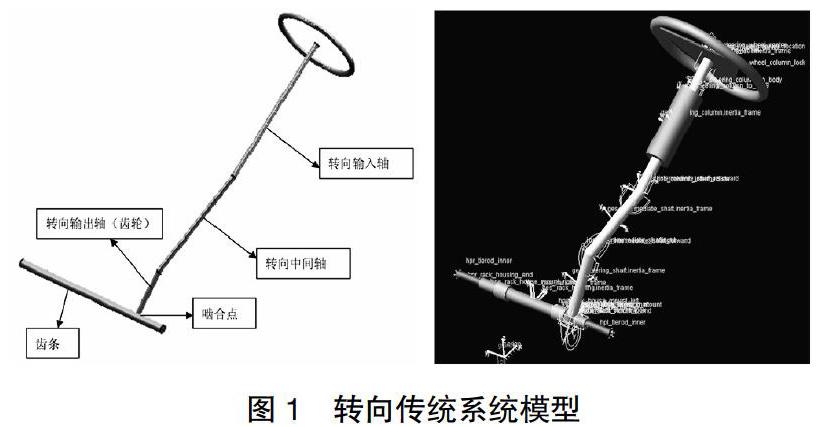
1 模型概述
所开发的转向传动系统模型由Adams/View MD2010环境建立,它包含的子部件如下:
(1)转向盘;
(2)转向输入轴、转向中间轴、转向输出轴(齿轮);
(3)齿条。
2 转向传动系统介绍及优化参数的设定
2.1 转向传动系统介绍
通过Adams/Car对悬架及整车参数进行性能优化之后,齿轮齿条转向器转向拉杆的内球饺点和外球饺点位置便可以确定[2]。在确定此位置以及整车总布置确定了方向盘的位置和角度后,则需要对转向传动轴的布置进行优化。优化的目的是使得转向输出轴的输出速度波动尽可能的小,保证传动平稳。
为保证从动轴转速波动平稳,必须满足三个条件:
(1)中间轴与主、从动轴的轴间角应相等;
(2)中间轴与主、从动轴的轴线应在同一平面上;
(3)中间轴两端的轴叉应在同一平面上。
对于以上三个条件,条件1可以通过优化满足;条件2因方向盘人机工程及其他条件的限制一般较难满足;条件3可以让转向中间轴的相位角等于传动中间轴分别和输入轴与输出轴组成的面之间的角相等,这样保证传动过程中平稳无波动。
2.2 优化参数设定
转向拉杆的内外球饺点以及整车布置性能优化后,转向传动轴可变化的参数不多,可进行设计的变量如表1。
2.3 变量和坐标的参数化
下面是各点的参数化表达式,变量前面带 DV的都是设计变量:
A点(X,DV_Y,Z)
——其中 X、Z 坐标不能更改,但是 DV_Y作为设计变量可以在一定范围内变化;
B 点(X+DV_R*sin(DV_theta),DV_Y,Z+DV_R*cos(DV_theta))
——此点为齿轮位于齿条前面的啮合方式的坐标;
C 点(X-DV_R*sin(DV_theta)+L_out*sin(phita)*cos(DV_y-L_out*cos(phita),Z+R*cos(DV_theta)+L_out*sin(phita)*sin((DV_ theta));
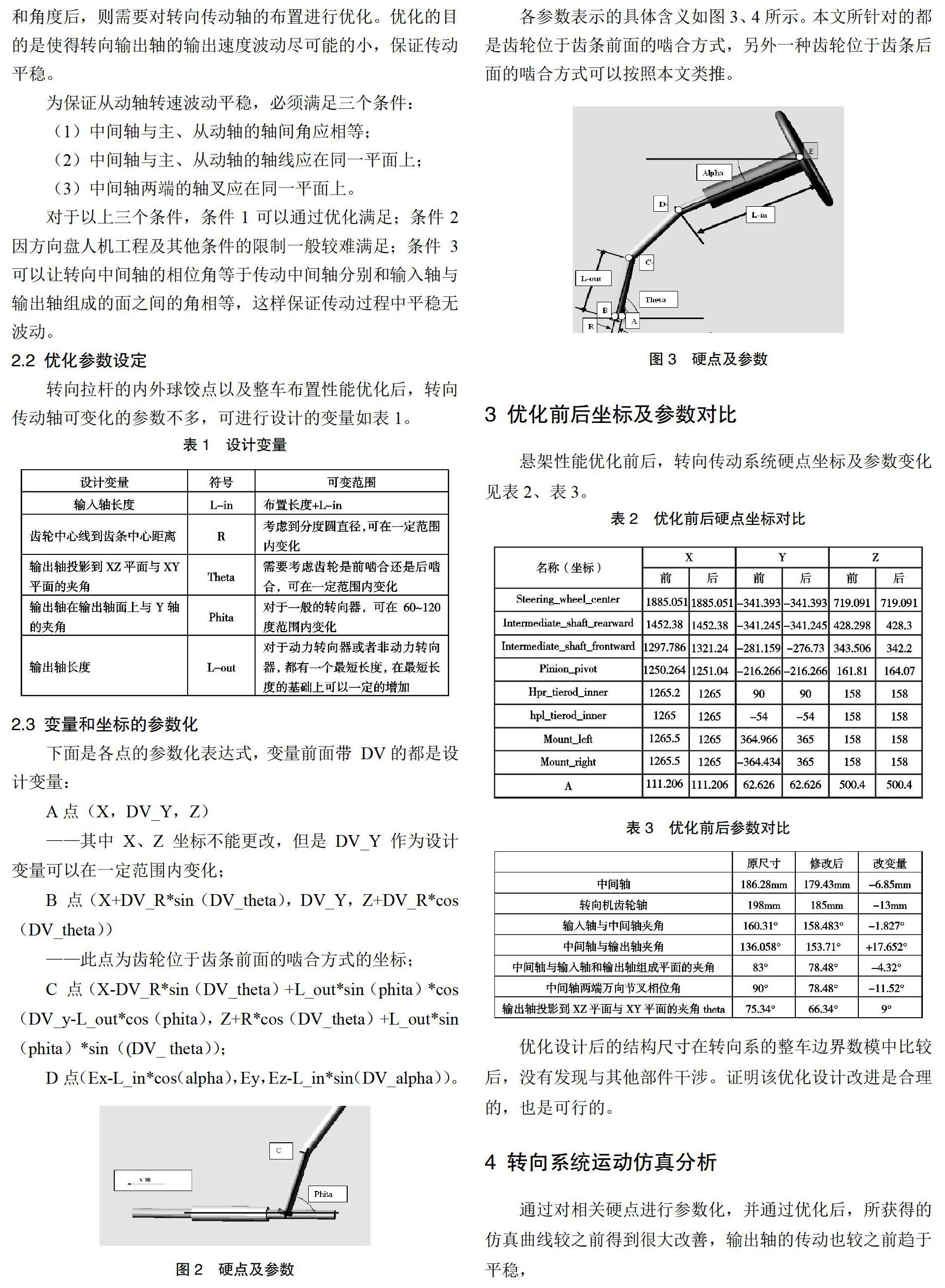
D点(Ex-L_in*cos(alpha),Ey,Ez-L_in*sin(DV_alpha))。
各参数表示的具体含义如图3、4所示。本文所针对的都是齿轮位于齿条前面的啮合方式,另外一种齿轮位于齿条后面的啮合方式可以按照本文类推。
3 优化前后坐标及参数对比
悬架性能优化前后,转向传动系统硬点坐标及参数变化见表2、表3。
优化设计后的结构尺寸在转向系的整车边界数模中比较后,没有发现与其他部件干涉。证明该优化设计改进是合理的,也是可行的。
4 转向系统运动仿真分析
通过对相关硬点进行参数化,并通过优化后,所获得的仿真曲线较之前得到很大改善,输出轴的传动也较之前趋于平稳,优化前后转向系统输出轴波动前后对比见表4。
优化后输出轴的转速波动率为3.67%,故转向系统传动变得更为平稳(一般输出轴波动率小于5%都是可行范围)[3]。
参考文献
[1] 章娟丽.基于ADAMS/View的汽车转向系统力矩波动优化设计[J]. 汽车实用技术.2018(09).
[2] 陈家瑞.汽车构造[M].机械工业出版社.2000.
[3] 裴锦华,李明.汽车转向系统力矩波动的匹配研究[J].汽车科技, 2010(03).
