农业人工智能技术:现代农业科技的翅膀
2020-11-29 13:04兰玉彬王天伟陈盛德邓小玲
华南农业大学学报 2020年6期
兰玉彬,王天伟,陈盛德,邓小玲
(华南农业大学 电子工程学院/人工智能学院,广东 广州 510642)
农业是国民经济中重要的产业组成部分,是我国的第一产业,是国家长治久安和百姓丰衣足食的重要保障,是保证一切生产的首要条件。传统农业中,人力劳动占据很大比例,农田和种植园主要采取粗放式管理,缺乏差异对待模式,导致作物或果实的品质和产量不能达到理想状态,且造成资源浪费以及环境恶化,甚至因病虫害治理效果不佳而造成绝产。随着土地资源的萎缩、极端气候带来的环境恶化,全球人口持续增长,农业生产方式亟待转型[1]。一系列问题的出现使得人们不得不重新审视农业发展状况。《改造传统农业》指出,发展中国家的经济发展要建立在稳定和可持续增长的农业基础上,传统农业不具备稳定增长的能力,提升农业的现代化水平需要借助前沿科技的力量,而人工智能(Artificial intelligence,AI)正是前沿科技最集中的代表,其与农业的深度融合被视为解决未来农业问题的重要途径[2]。
《新一代人工智能发展规划》指出,人工智能作为新一轮产业变革的核心驱动力,将进一步释放历次科技革命和产业变革积蓄的巨大能量,并创造新的强大引擎,形成从宏观到微观各领域的智能化新需求,催生新技术、新产品、新产业、新业态和新模式,深刻改变人类生产生活方式和思维模式,实现社会生产力的整体跃升。虽然早在20世纪中后期人类就开始探索人工智能在农业中的应用,但由于农业的行业特征,人工智能技术在农业领域应用的广度、深度都要明显弱于其他行业。
农业人工智能作为智慧农业的重要组成部分,不单只是2个学科的融合,更是人工智能技术在农业领域的一次积极实践,是传统农业在人工智能助力下焕发蓬勃生机的大胆革命。
1 农业人工智能的主要技术
农业人工智能是多种信息技术的集成及其在农业领域的交叉应用,其技术范畴涵盖了智能感知、物联网、智能装备、专家系统、农业认知计算等。
1.1 智能感知技术
智能感知技术是农业人工智能的基础,其技术领域涵盖了传感器、数据分析与建模、图谱技术和遥感技术等。
传感器赋予机器感受万物的功能,是农业人工智能发展的一项关键技术[3]。多种传感器组合在一起,使得农情感知的信息种类更加多元化,对于智慧农业至关重要。得益于三大传感器技术(传感器结构设计、传感器制造技术、信号处理技术)的发展,现在可以测量以前无法获取的数据,并得到影响作物产量、品质的多重数据,进而辅助决策[4]。当前在农业中使用较多的有温湿度传感器、光照度传感器、气体传感器、图像传感器、光谱传感器等,检测农作物营养元素、病虫害的生物传感器较少。通过图像传感器获取动植物的信息,是目前农业人工智能广泛使用的感知方式。新兴纳米传感器、生物芯片传感器等在农业上的应用,目前大多还处于研究阶段。
深度学习算法是图像的农情分析与建模的利器。当前基于深度学习的农业领域应用较广泛,如植物识别与检测、病虫害诊断与识别、遥感区域分类与监测、果实载体检测与农产品分级、动物识别与姿态检测领域等[5]。深度学习无需人工对图像中的农情信息进行提取与分类,但其有效性依赖于海量的数据库。农业相关信息的数据缺乏,是深度学习在农业领域发展的主要瓶颈。
可见光波段可获得农情的局部信息,而成像与光谱相结合的图谱技术,可获得紫外光、可见光、近红外光和红外光区域的图像信息。其中,高光谱成像技术可以探测目标的二维几何空间和光谱信息,获得百位数量级的高分辨率窄波段图像数据;多光谱成像技术对不同的光谱分离进行多次成像,通过不同光谱下物体吸收和反射的程度,来采集目标对象在个位或十位数量级的光谱图像。基于多光谱图像和高光谱图像的农情解析,可有效弥补可见光图像感知的不足。
根据与感知对象的距离,感知方式有近地遥感、航空遥感和卫星遥感等。因具有面积广、时效性强等特点,20世纪30年代起遥感技术就开始服务于农业,首先应用这一技术的是美国,人们将其用于农场的高空拍摄,照片供农业调查使用。相对于西方国家,亚洲地区运用遥感技术较晚,但近些年来遥感技术在某些方面也有了超前突破。
1.2 农业物联网技术
农业物联网可以实时获取目标作物或农业装置设备的状态,监控作业过程,实现设备间、设备与人的泛在连接,做到对网络上各个终端、节点的智能化感知、识别和精准管理。农业物联网将成为全球农业大数据共享的神经脉络,是智能化的关键一环。
随着人工智能应用领域的拓展,越来越多的应用和设备在边缘和端设备上开发部署[6],且更加注重实时性,边缘计算成为新兴万物互联应用的支撑平台已是大势所趋。对于农业应用领域,智能感知与精准作业一体化的系统尤其需要边缘智能,无人机精准施药是边缘人工智能的最佳应用场景。物联网设备类型复杂多样、数量庞大且分布广泛,由此带来网络速度、计算存储、运维管理等诸多挑战[7]。云计算在物联网领域并非万能,但边缘计算可以拓展云边界,云端又具备边缘节点所没有的计算能力,两者可形成天然的互补关系。将云计算、大数据、人工智能的优势拓展到更靠近端侧的边缘节点,打造云-边-端一体化的协同体系,实现边缘计算和云计算融合才能更好解决物联网的实际问题[8]。
多个功能节点之间通过无线通信形成一个连接的网络,即无线传感器网络(Wireless sensor network,WSN)。无线传感器网络主要包括传感器节点和Sink节点[9],如图1所示。采用WSN建设农业监测系统,全面获取风、光、水、电、热和农药喷施等数据,实现实时监测与调控,可有效提高农业集约化生产程度和生产种植的科学性,为作物产量提高与品质提升带来极大的帮助[10]。
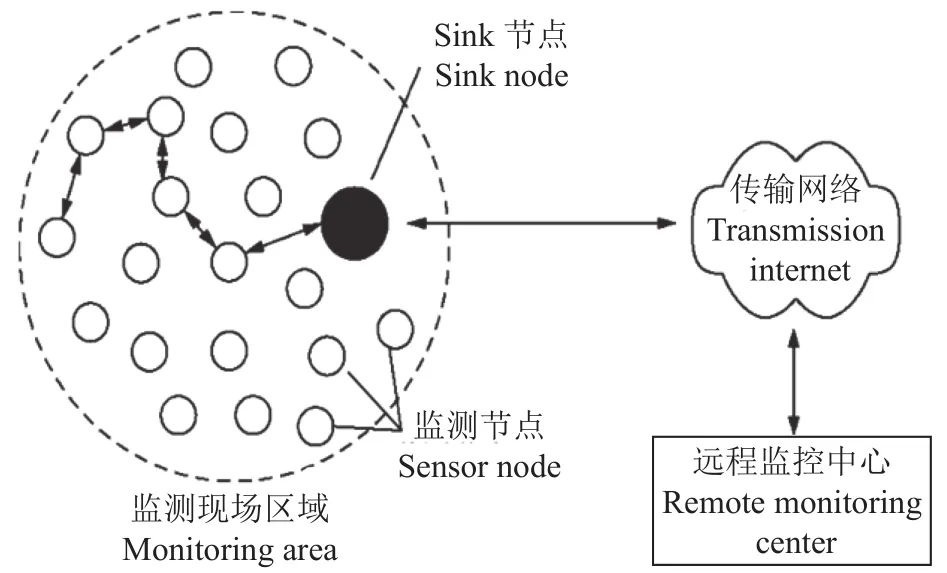
图1 无线传感器网络架构Fig. 1 The architecture of wireless sensor network
1.3 智能装备系统
智能装备系统是先进制造技术、信息技术和智能技术的集成和深度融合。针对农业应用需求,融入智能感知和决策算法,结合智能制造技术等,诞生出如农业无人机、农业无人车、智能收割机、智能播种机和采摘机器人等智能装备。
无人机融合AI技术,能有效解决大面积农田或果园的农情感知及植保作业等问题。从植保到测绘,农业无人机的应用场景正在不断延伸。如极飞科技的植保无人机具有一键启动、精准作业和自主飞行等能力,真正实现了无人机技术在喷施和播种等环节的有效应用,从而为农业生产者降本增效[11]。
无人车利用了包括雷达、激光、超声波、GPS、里程计、计算机视觉等多种技术来感知周边环境,通过先进的计算和控制系统,来识别障碍物和各种标识牌,规划合适的路径来控制车辆行驶,在精准植保、农资运输、自动巡田、防疫消杀等领域有广阔的发展空间。图2为极飞科技于2020年7月发布的全球首个量产的农业无人车平台R150[12]。

图2 R150无人车Fig. 2 R150 unmanned vehicle
农业机器人可应用于果园采摘、植保作业、巡查、信息采集、移栽嫁接等方面,越来越多的公司和机构加入到采摘机器人的研发中,但离采摘机器人大规模地投入使用尚存在一定距离[13]。图3为果蔬采摘机器人。

图3 采摘机器人Fig. 3 Harvesting robot
1.4 专家系统
专家系统是一个智能计算机程序系统,其内部集成了某个领域专家水平的知识与经验,能够以专家角度来处理该领域问题[14]。在农业领域,许多问题的解决需要相当的经验积累与研究基础。农业专家系统利用大数据技术将相关数据资料集成数据库,通过机器学习建立数学模型,从而进行启发式推理,能有效地解决农户所遇到的问题,科学指导种植。农业知识图谱、专家问答系统可将农业数据转换成农业知识,解决实际生产中出现的问题。
农业生产涉及的因素复杂,因地域、季节、种植作物的不同需要差异对待,还与生产环境、作业方式和工作量等息息相关。目前人工智能在农业上的应用缺乏有关联性的深度分析,多数只停留在农情数据的获取与表层解析,缺乏农业生产规律的挖掘,研究与实际应用有出入,对农户的帮助甚微。农业知识图谱可以将多源异构信息连接在一起,构成复杂的关系网络,提供多维度分析问题的能力,是挖掘农业潜在价值的智能系统[15]。
专家问答系统(Question answering system, QA)是信息检索系统的一种高级形式,它能用准确、简洁的自然语言回答用户用自然语言提出的问题,是人工智能和自然语言处理领域中一个倍受关注并具有广泛发展前景的研究方向[16]。专家问答系统的出现,可以模拟专家一对一解答农户疑问,为农户提供快速、方便、准确的查询服务和知识决策。知识图谱与问答系统相结合,将成为一个涵盖知识表示、信息检索、自然语言处理等的新研究方向[17]。但这类系统的开发应用多数是针对一个特定的对象,系统内容一经确定就很难改变,是一种静态的系统。而在实际的农业生产中,一方面病虫害的种类在不断发生变化,另一方面由于抗药性及环境条件等影响因素的变化使得同一种病虫害的发生为害特点也在不断地变化。因此结合农业病虫害的发生为害特点,开发一种动态、开放的病虫害预测预报专家系统平台是十分必要的[18]。
1.5 农业认知计算
认知计算模仿、学习人类的认知能力,从而实现自主学习、独立思考,为人们提供类似“智库”的系统,具有甚至超越人类的认知能力。该系统主要通过采集、处理和理解人类能力受限的大规模数据,辅助农业生产和贸易等活动、减少参与农业任务的人工、提高作业效率,基于认知分析提供农业领域的决策支持,推动智慧农业发展。目前认知计算在农业领域内的研究尚未形成规模,但因具有强人工智能特性,应用前景乐观。
2 农业人工智能的研究现状
人工智能技术在农业科学领域中的应用贯穿于生产前中后的各阶段,涉及种植业、畜禽牧业和渔业等农业领域,以其独特的技术优势助力实现智能管理、精准管控,以机器人全部或部分代替人力,提高生产效率和产品质量,减少环境污染,应用潜力巨大。
2.1 人工智能在农业方面的应用
2.1.1 农作物识别与检测 作物拥有独特的颜色、纹理、形状等特征,可通过图像分析进行识别与检测,并进行过程监测和产量预测等。Bah等[19]提出了一种卷积神经网络(Convolutional neural networks,CNN)结合无监督训练数据集的新型全自动学习方法,可以从遥感图像中检测杂草,其效果与传统有监督训练数据标记相吻合。Muhammad等[20]采集了906幅油菜与杂草图像,与VGG16相比,基于ResNet 50的SegNet杂草识别模型效果较好;张乐等[21]基于 Faster R-CNN(Regions with CNN features,R-CNN)深度网络模型,对比了基于VGG16、ResNet50和ResNet101这3种特征提取网络的结果,最终提出基于VGG16的Faster R-CNN深度网络模型更适用于油菜与杂草目标的识别。Knoll等[22]将采集的500幅萝卜和杂草图像进行数据扩充,采用CNN对拍摄图像进行分类识别,平均识别精度与召回率均超过99.5%,F1值达0.996 2。彭红星等[23]提出了一种改进的SSD(Single shot multibox detector)水果检测模型,该模型在各种环境下识别苹果、荔枝、脐橙、皇帝柑的平均精度(Average precision,AP)达到88.4%。Fu等[24]基于Faster RCNN检测野外遮挡、重叠、相邻和独立的猕猴桃果实,AP均在80%以上。为了有效定位和识别麦田中的杂草,Zhang等[25]基于YOLOV3-tiny网络的深度学习研究开发了一种适用于无人机的杂草检测模型,可以高效、快速地定位和识别作物田中的杂草。
区分果实与植株其他部分,帮助系统有效检测到果实位置和数量,能够让农户直观地了解到当前园区植株的结果情况,从而对产量进行预估。另外,将作物各部分分类,有助于植株长势的判断,例如区分柑橘新梢与叶片,可以结合时间信息告诉农户需要关注的生长节点。农户可根据花果比例决定是疏花疏果还是保花保果。Tristan等[26]提出一种算法,使用三波段数码相机拍摄伞房花,在多种情况下对于15 m以内的树木上的花朵分类精度可达到90%以上,能有效区分反光叶片与花朵,并且精度通常优于95%。王书志等[27]用相机、手机分别在不同的光照和环境条件下拍摄了葡萄的新梢图像,在制作的训练图像集上对SegNet、FCN(Fully convolutional networks)和U-NET这3种卷积神经网络进行迁移学习,得到3种分割网络模型,分别对测试集新梢图像进行分割试验,结果表明FCN的总体分割效果最优、泛化性能较好。宗泽等[28]在大田环境下获取农田作物视频数据,基于Faster RCNN识别玉米冠层,用差分内积线性特性改进质心检测算法,对玉米冠层识别区域进行质心定位计算,得到玉米苗质心的像素坐标。
当然,上述研究仍有待更多的真实场景实践和检验。模型识别的精度和速度,需要根据不同的应用场景作出权衡。实时性要求高更需要轻量化网络,便于在边缘计算平台进行部署。
2.1.2 农作物病虫害与缺素诊断 同一种作物可能存在几种甚至几十种病虫害,并且某几种病虫害发生时的症状可能相同或相似,仅凭肉眼和经验难以进行准确地识别与判断,导致无法对症下药,从而延误病情。机器视觉或光谱成像等方式可以感知肉眼难以获得的信息,通过机器学习海量数据,在病虫害识别与诊断方面具有广阔的应用前景。龙满生等[29]利用智能手机在室内补光条件下拍摄叶片并对图像进行预处理作为输入,用基于TensorFlow的AlexNet模型对4种油茶病害症状进行建模,其分类准确率高达96.53%。王献锋等[30]使用自适应判别深度置信网络(Deep belief network,DBN)识别棉花的3种虫害(棉铃虫、棉蚜虫、红蜘蛛)和2种病害(黄萎病、枯萎病),识别准确率为82.8%。许景辉等[31]在VGG16模型的基础上,设计了全新的全连接层模块,并将VGG16模型在Image Net图像数据集训练好的卷积层迁移到本模型中,结果表明,该模型对玉米健康叶、大斑病叶、锈病叶图像的平均识别准确率为95.33%,与全新学习相比,迁移学习能够明显提高模型的收敛速度与识别能力。针对田间虫害,Xie等[32]使用数码相机和手机拍摄了4 500幅含有40种田间昆虫的图像,提出一种利用多层次特征学习对田间作物害虫进行自动分类的无监督方法,与颜色、纹理、SIFT、HOG有限特征分类的结果相比,对虫害的识别精度显著提高了。张善文等[33]提出一种基于环境信息和改进DBN的冬枣病虫害预测模型,对大棚冬枣常见的2种虫害(食芽象甲和红蜘蛛)和3种病害(枣锈病、枣炭疽病、黑点病)进行预测,平均预测正确率高达84.05%。此外,刘文定等[34]提出一种基于FCN的林区航拍图像虫害区域识别方法,黄双萍等[35]利用GoogleNet检测水稻穗瘟病,Mohanty等[36]采用深度卷积神经网络 (Deep convolutional neural networks,DCNN)识别14种作物的26种疾病,均取得了一定的效果。兰玉彬等[37]对柑橘植株高光谱影像进行研究,以二次核SVM判别模型对全波段一阶导数光谱的分类准确率达到94%以上,表明低空高光谱遥感监测黄龙病(Huanglongbing,HLB)具有可行性。Deng等[38]进一步提出了基于植被指数和冠层光谱特征的多特征融合HLB检测方法,具有99%以上的分类精度,并能够输出冠层病害的分布。除此之外,Lan等[39]对比了5种机器学习方法,对柑橘HLB遥感多光谱数据进行处理,得出在所有模型中,植被指数的主成分分析特征与原始数值特征相结合表现出最好的准确性和一致性,集成学习和神经网络方法具有很强的鲁棒性和最佳的分类效果。蜘蛛螨是棉花的主要害虫之一,Huang等[40]提出了一种基于多目标遗传算法进行波段选择,利用高光谱反射率检测蜘蛛螨侵染的方法,与主流机器学习方法相比,具有精度高、复杂度低的优点。针对数据量欠缺的问题,Deng等[41]利用改进的多分类支持向量机的建模方式识别美国德州地区高粱的甘蔗蚜虫,可得到蚜虫的侵染程度,可为高粱的田间虫害防治提供较可靠的依据。这些研究对作物生产管理和政府防控病情有一定借鉴。
在田间病虫害实际检测中,病虫害特有的生物特性会造成识别和诊断的难度。病虫害症状多样,而且有些病虫害早期症状不明显,有些与植物缺乏某种元素时的症状较为相似,容易引起误诊。在分析采集的数据时,不仅需要农学专家加以甄别,还需要通过一定的生化检测手段进一步确认,从而避免使用错误的标签来训练模型,导致识别和诊断的精度降低。另外,由于作物种类繁多,同一种作物又存在多种病虫害,当前并没有一种模型适用于所有作物或所有病害的识别检测。迁移学习成为训练病虫害识别模型的重要手段[5]。
当作物缺乏必需营养元素时会出现相应病征,通常表现为叶片失绿、黄化、发红或发紫;组织坏死,出现黑心、枯斑、生长点萎缩或死亡;器官畸形,株型异常;生长发育进程延迟或提前等。农户往往都是根据经验来进行处理,并没有较为精确的诊断依据。农业人工智能相关技术为作物缺素诊断提供了病症判别与施肥量化的依据。Trung-Tin等[42]使用人工神经网络模型来识别、分类和预测番茄植株中发生的营养缺乏状况。岳学军等[43-44]以作物特征光谱、灰度共生矩阵纹理和CNN纹理等特征为输入信息,建立了ICA DNN (Independent component analysis, Deep neural network)和SSAE DLN(Stacked sparse autoencoder, Deep learning network)深度学习网络,检测了龙眼叶片的叶绿素含量和柑橘叶片钾含量,研究对2种作物的长势预测提供了理论依据。Sulistyo等[45]利用基于MLP(Multilayer perceptron)的深度学习模型估算小麦叶片的氮含量,误差为0.022,优于基于SPAD仪表的0.058。熊俊涛等[46]通过摄像头采集水培大豆叶片图像,利用VGG16模型将特征明显的叶片归类为2类缺氮特征和4类缺磷特征,可为自动化生产中植株缺素情况估计提供技术参考。
2.1.3 农作物生产精准管控 果园与农场的种植面积往往较大,传统人工巡视费时费力,且从地面视角很难宏观获取种植区域的农情,也无法精确细致地监测特定区域。农业人工智能中机器视觉、深度学习以及遥感技术的引入使精准管控成为可能。对于大范围田地的监测,多是以遥感的方式,通过无人机搭载RGB相机或光谱相机采集图像,或是在田间布置气象站、摄像头等装置。对这些农情信息数据进行分析,可以提前得到作物的生长趋势,以实现预防预警,图4为遥感监测系统示意图。从获取的农业数据中得到感兴趣的信息并进行分析,这对于精准作业的下一个环节至关重要,由这些信息可以得知哪些植株已经染病,哪片田地亟需灌溉,然后按需作业、对症下药,实现精准管控。

图4 遥感监测系统Fig. 4 Romote sensing system for monitoring
Chen等[47]提出了一种基于长短记忆网络(Long short-term memory,LSTM)的农业环境预测方法,可以提前对农田环境不良状况做出预警;Zhou等[48]提出了一种基于全卷积网络的稻穗检测和计数系统,并使用该系统进行水稻表型自动化测量,通过每单位面积的穗数估计产量。Carlos等[49]使用无人机搭载2台覆盖400~850 nm(分辨率为20 cm)和950~1 750 nm(分辨率为50 cm)波段的高光谱摄像机获取小麦田间图像,建立用于N量化的多个回归模型并测试其性能,与通过模型反演估计的植物性状以及基于单个光谱指数的标准方法所建立的模型性能进行了比较,探究在灌溉和非灌溉条件下与光合作用直接相关的因素。Jiang等[50]基于LSTM提出了一种玉米估产模型,以不同空间的作物长势、气象和遥感数据作为信息输入,深度学习模型在季中和季末的玉米产量预测结果,比岭回归和随机森林模型有明显的提升。Alan等[51]提出了一种高通量表型方案,用以从航空图像中提取有意义的信息,使用固定翼飞机搭载相机对大面积种植的生菜地进行图像采集,结合机器学习以及模块化软件工程技术,实现了超大型航空影像中与产量相关表型的测量。Zhu等[52]提出一种无线传感网络用以监控作物叶片的湿度,该系统对作物冠层叶片湿度监测有较高的准确性。Tahir等[53]成功使用低成本多光谱无人机根据归一化植被指数(Normalized difference vegetation index, NDVI)估算了花生植株的叶面积指数和产量。铁皮石斛是中国传统中药和极具观赏价值的植物,Long等[54]提出了一种基于可见光和高光谱成像的技术,用于检测不同生长阶段植株体内的氮素含量。
章璐杰[55]基于物联网技术构建了葡萄园智慧管理系统,可以完成葡萄园环境信息的采集、存储、处理与挖掘,实现葡萄整个生长周期的自动监测和控制,具有比较好的适用性和通用性。袁帅等[56]基于消息队列遥测传输协议(Message queuing telemetry transport, MQTT)远程控制技术,借助无线传感器获取作物实时生长环境信息,运用无人机航拍获取作物病情、虫情和苗情等参数和视频图像信息,利用数据分析实现对作物的灾情预警、预报,通过对机器人和电磁阀的智能控制,实现果园的智慧管理和水肥一体化智能灌溉。李志然[57]基于云平台蜜柚专家系统和智慧农业系统,实现对蜜柚果园的全天全方位的图像与视频监控,提高了果园日常管理和病虫害防治诊断水平;部署的各类传感器可监测果园土壤温湿度、空气温湿度、光照强度、CO2浓度、降雨量和植物养分含量等参数,这些数据有利于蜜柚生长模型和产量预测等模型的建立;水肥一体化系统可实现灌溉及施肥控制。杨伟志等[58]针对山地柑橘传统灌溉方式存在的费时耗力、水资源利用率低等问题,设计了基于物联网和人工智能技术的山地柑橘智能灌溉专家系统。
2.1.4 人工智能在农产品质量分拣和溯源方面的应用 在各种微电子系统、纳米技术、传感器、现场快速检测技术、数据远程传输与处理技术等加持下,农产品检验检测系统趋向小型化和智能化,溯源技术走向精准化、集成化和物联化,对农产品质量安全因素实现全程追踪与管控。
在农产品质量检测与分级应用研究方面,谢忠红等[59]提出了一种基于高光谱和深度学习技术的圆叶菠菜新鲜度的识别方法,融合3个波长对图像进行等级识别可以实现最好效果,识别准确率最高达到了80.99%。针对自动分级视频图像中出现的红枣定位、缺陷检测难问题,曾窕俊等[60]提出一种基于帧间最短路径搜索目标的定位方法和集成卷积神经网络模型(Ensemble-convolution neural network,E-CNN),定位准确率可达100%,分类精度大于颜色和纹理特征分类模型以及卷积神经网络模型的,具有较高的识别准确率及较强的鲁棒性。Dario等[61]为实现对整个供应链上包装后的鲜切生菜的质量评估,同时尽可能减少包装对检测带来的限制,提出一种将计算机视觉系统( Computer vision system,CVS)与CNN相结合的方法。倪超等[62]提出一种基于短波近红外高光谱和深度学习的籽棉地膜分选算法,算法对地膜识别率达到95.5%,地膜选出率达95%,满足实际生产需求。高震宇等[63]设计了一套鲜茶叶智能分选系统,实现了对鲜茶叶中的单芽、一芽一叶、一芽二叶、一芽三叶、单片叶、叶梗的有效分类。李帷韬等[64]基于深度学习和集成学习,提出了一种具有认知结果熵测度指标约束的智能反馈认知方法,用以对青梅品级进行快速分类,对1 008幅青梅图像的平均识别率为98.15%,有效地增强了特征空间的泛化能力以及分类器的鲁棒性。
在农产品溯源问题方面,马腾等[65]设计了一种农产品原产地可信的溯源系统,由溯源电子秤、云检测程序和检测网站3部分组成,消费者可通过商品标签查询商品信息、产地及判断真伪。白红武等[66]利用QR(Quick response)二维码、溯源、物联网等技术,结合农产品产业链的特点,开发了一种多层次、多角色、多功能的农产品质量安全溯源系统。孙旭等[67]设计并实践了近场通信(Near field communication,NFC)与物联网融合应用的肉鸡供应链信息系统,并就其层次及数据结构进行了系统设计。Catarinucci等[68]结合射频识别(Radio frequency identification,RFID)技术和WSN,实现了白葡萄酒从葡萄园产出到消费者的可追溯性。Ruiz-Garcia等[69]提出一种基于ZigBee的无线传感器节点用于实时监测水果室内储存和运输状况。Xiao等[70]设计了一种无线传感器网络监测冷冻和冷藏水产品运输过程中的温度实时变化。粮食生产后会经过存储、流通等环节,有一部分粮食损失是由于储运过程中的虫害造成的。马一名[71]设计了一种针对多用户类型的储粮害虫防治的专家反馈系统,普通用户可以将害虫数据上传,查看专家反馈意见、害虫图鉴等,专家用户可以查看害虫数据、提问、发布反馈意见等。于合龙等[72]应用密码学原理设计了节点授权加密法,并以此构建了基于区块链面向水稻全供应链的信息保护模型,从而达到保护企业隐私的目的。许继平等[73]构建了粮油食品全供应链信息安全管理模型,设计了区块链和关系型数据库相结合的双模数据存储机制、定制化部署的粮油食品供应链智能合约,并提出了原型系统架构和设计方案。Deepak等[74]提出了一种基于区块链的农产品溯源解决方案,给出了透明、准确和可追溯的供应链系统,为基于区块链的农产品供应链的设计提供了借鉴。
2.1.5 土地与种植资源管理 因具有宏观、实时、动态监测的优点,遥感技术在植被分布与变化监测方面发挥着愈来愈重要的作用。传统卫星遥感技术已经被证实在土地资源管理方面的可行性,而无人机遥感作为卫星遥感的有益补充,具有时效高、分辨率高、成本低、损耗低、风险低及可重复等优点[75]。遥感技术可以为农业用地选址及规划进行合理指导、监测当前园区作物的覆盖率、并可对所获取的数据进行进一步分析。将深度学习与遥感技术相结合,这一过程更加智能化,能更好地服务和指导农业生产[76]。
李冰等[77]提出一种从时间序列影像的植被指数直方图曲线中获取植被指数阈值的方法,获取的多时相数据可以用于表示作物覆盖度的变化。该方法缺点在于需要不同时间对同一地块的观测影像,同时保证存在植被像元和非植被像元空间分布具有明显差异的2个观测时期。刘峰等[78]利用无人直升机监测北京地区板栗主要生育期,提出了一种无人机遥感影像植被覆盖度快速计算方法,利用多时相无人机遥感影像实现了板栗植被覆盖度年变化监测。李存军等[79]研究发现一些基于短波红外波段构造的光谱指数有应用于估测冬小麦覆盖度的潜力,且不易受其他因素影响。韩文霆等[80]用固定翼无人机航拍河套灌区五原县塔尔湖镇的可见光图像,通过试误法确定了无人机遥感影像的最佳分割参数,结果表明,支持向量机能较准确地提取各地的特征,采用支持向量机结合决策树分类法创建的决策树模型,可以进一步提高提取精度。鲁恒等[81]利用D-CNN剔除道路、田埂等线状地物,将DCNN特征训练过程中得到的特征提取方法迁移到耕地提取中,提出了一种利用迁移学习机制的耕地提取(TLCLE)方法,与利用易康(e Cognition)软件进行耕地提取(ECLE)的结果进行比较,结果显示,TLCLE较ECLE总体精度略有提高,且在保证耕地地块完整、连续性方面优于ECLE。编制土地覆盖图需要包含精准类别划分的土地覆盖数据,传统获取方法成本高、工程量大、效果欠佳。刘文萍等[82]提出一种基于改进DeepLab V3+模型面向无人机航拍图像的语义分割方法,用于分割不同类型的土地区域并分类,从而获取土地覆盖数据,相比原始模型,这种方法在测试集的像素准确率和平均交并比均有所提升,并且优于常用的语义分割模型FCN-8S和PSPNet,但当原始图像发生大范围的变形时,因受到严重干扰,模型分割结果质量低。Ienco等[83]选用LSTM模型对多时空遥感数据的土地覆盖进行分类,与现有的分类器相比,其性能较高,且在特征不明显或类别极易混合的情况下优于传统方法。针对建立和更新田间图形数据库,以遥感影像为底图人工勾绘地块耗时费力这一问题,李森等[84]尝试在深度学习边缘检测模型的基础上,采用空洞卷积结构,提出构建应用于遥感影像的边缘检测模型用于提取耕地地块边缘,试验结果表明,该方法检测画面更加清晰,能够显著提高田间地形数据的更新效率。Kussul等[85]基于D-CNN对11种土地覆盖和作物分类的平均AP为94.6%。Vittorio等[86]基于递归神经网络(Recursive neural network,RNN)与CNN使用Sentinel-2卫星提供的图像,提出了一种基于像素的LC&CC的新型深度学习模型,用以监测当前土地使用情况以及其随时间的变化。为了克服卫星遥感影像解译方法处理无人机航拍影像时的一系列问题,孙钰等[87]提出一种基于深度学习的无人机航拍监测方法,通过多尺度融合得到了FCN的5个变种模型,其中,FCN-4s模型是识别大棚和地膜农田的最佳模型,在识别精度和运行时间上存在优势。
2.2 人工智能在畜牧业的应用
家禽家畜是农户一部分重要的经济来源,由于单位经济价值较农作物更高,一旦发生疫情,损失较为严重。动物个体及其行为识别是人工智能在禽畜牧业的重要应用。大规模饲养的农场或牧场需要对每个个体进行精确饲养,首先需对个体进行识别,才能对家禽家畜进行高效、稳定的溯源,从而保证肉制品安全、防止疾病扩散。Mark等[88]使用在人脸识别中常用的3种模型:Fisherfaces、VGGFace和作者训练的CNN,在农场环境中对10只猪进行了测试,在1 553张图像的验证集上,识别准确率达到96.7%。赵凯旋等[89]提出了一种基于视频分析用卷积神经网络准确识别奶牛个体的方法,具有不用接触、精确度高、适用性强的特点。黄巍[90]为了提高牛脸检测的效果,对SSD模型的基础网络、default box高宽比设置等进行改进,使用MobileNet v2作为SSD模型的基础网络,并在额外的特征提取层中使用深度可分离卷积,用K-Means++算法对样本进行高宽比聚类,试验结果表明,针对牛脸检测,改进SSD模型在模型精度、速度上均优于其他目标检测模型。杨阿庆等[91]提出了一种基于FCN的哺乳母猪图像分割算法,该算法有较好的泛化性和鲁棒性,能够实现猪舍场景下哺乳母猪准确、快速的图像分割。Muzzle point是牛个体的主要生物特征,类似于人类指纹。Santosh等[92]提出了一种牛的Muzzle point图像自动识别算法,在500头牛的Muzzle point图像数据库中识别精度达到93.87%。
动物的行为识别有助于管理者了解动物的健康状况。杨秋妹等[93]通过传统的阈值分割方法得到二值化图像将猪从背景中提取出来,引入图像占领指数对猪的饮水行为进行预判,最后利用深度学习方法构造猪只头部检测器,可更精准地判定饮水行为的发生。薛月菊等[94]提出一种基于改进Faster R-CNN的哺乳母猪姿态识别算法,在测试集上对哺乳母猪的站立、坐立、俯卧、腹卧和侧卧5类姿态的识别准确率平均达到93.25%。为了防止家禽家畜丢失,李丹等[95]提出了一种基于Mask R-CNN的猪只爬跨行为识别算法,能够自动有效地检测猪只爬跨行为。目前蛋鸡的健康状况检测仍采用人工方式,不利于蛋鸡养殖业的集约化、规模化发展,蛋鸡行为检测的研究在自动和信息化养殖方面具有重要的意义。王凯[96]基于TD-YOLOv3算法以及DJango前端开发技术设计了一种蛋鸡行为在线检测系统,实现了蛋鸡行为检测以及数据库等功能。Arcidiacono等[97]基于加速度计项圈数据提出了一种牛行为分析的新方法。
3 我国发展农业人工智能技术面临的挑战
3.1 中外差距比较分析
3.1.1 前沿基础 与国外相比,我国农业机器人的研究与开发尚处于起步阶段。美国早在20世纪40年代就基本实现了农业机械化,80年代末开始农机自动驾驶研究,目前大部分智能农机根据卫星、无人机等进行数据收集、分析、模型创建,基于智能决策系统预测作物产量、需水量以及施肥量等。中国智能农机研究起步较晚,与美国存在较大差距。20世纪90年代中期,国内才开始农业机器人的研发。目前我国已开发出的农业机器人有耕耘机器人、除草机器人、施肥机器人、喷药机器人、蔬菜嫁接机器人、收割机器人、采摘机器人等。我国农业机器人的推广,主要集中在大田作业中自动驾驶农机,以及农业植保无人机的应用等。作为一种新型智能农机,农用无人机在我国虽起步较晚,但发展迅速,目前无人机产业已处于全球领跑水平。在无人机制造领域,国内制造商已领先抢占世界市场。2019年,全国有7 000多家无人机企业获民用无人驾驶航空器经营许可证,交易规模突破500亿元。其中,以深圳为代表的珠三角地区走在行业前列。
人工智能发展包括基础层、技术层和应用层。相比美国的人工智能全产业布局特征,我国发展主要集中在应用层,在技术层和基础层只是局部有所突破,迫切需要全面提升整体研发体系以及行业应用模式。在国家政策支持以及市场驱动下,中国的人工智能发展十分迅速。近5年中国在国际杂志上发表的有关机器视觉在农业领域应用的文章和专利数量保持高度增长,在数量上已经赶超美国,但文章的被引率总体低于美国。美国的研究侧重于基础理论,中国侧重于实际应用。
3.1.2 核心技术 在现代农业技术应用中,中美在自动化技术水平、信息化服务技术水平、农机作业效率等诸多方面存在差距。然而,即使是发达国家,农业智能化、无人化也处于早期发展阶段。机器视觉和深度学习技术是近几年来农业人工智能研究的核心,在农业种植和养殖等领域具有广泛的应用空间。云智能与边缘智能的融合正在加速机器视觉和深度学习在农业生产中的落地应用。农业认知计算技术将成为未来农业人工智能的研究方向。
3.1.3 重大产出 从产品竞争力来看,美国已实现农业的高度机械化、数字化、信息化和自动化,其大型高端农机产品技术遥遥领先于我国。我国已研发出具有国际领先技术水平及自主知识产权的多款新型农用无人机。我国农用无人机飞控技术现处于全球领跑地位,无人机装备总量和作业面积都位列全球第一。美国无人机在农业上的应用侧重于信息采集和农田监管,而中国常见的是植保作业。
美国的农业机器人产品相对成熟,很多产品取得了广泛的应用成果。我国研制出的农业机器人大多存在功能单一、成本偏高、实际应用较少等问题,与美国相比,在可靠性、精度和效率方面也有一定的差距,特别是在智能化程度和实际应用方面更是差距明显。
3.2 国际发展趋势
全球发达国家高度重视人工智能技术与农业领域的融合发展,正在逐步完善相关内容。农业认知计算(可用于发现农业知识)、深度学习与机器视觉(可用于实现病虫草害识别、目标检测等)、5G技术(可用于大容量农业视频/遥感图像传输)、农业物联网、大数据、云计算与边缘计算(可用于农业生产精准管控)、虚拟助手(可用于辅助果树剪枝、动物手术以及农业交互式培训)等一系列深刻影响农业发展的核心技术正驱动着农业人工智能的飞速发展。
全球农业生产的集约化和规模化进程不断加快,农业机器人将成为未来农场的主力,其相关研究已成为世界热点。农业机器人的广泛应用是人工智能农业领域市场快速发展的重要因素。2017—2020年,人工智能在农业中应用的年复合增长率为22.68%,2016年相关产业产值为27.6亿美元,预计2020年为111亿美元,2025年增至308亿美元,涉及农业无人机、无人拖拉机、智能收获机、智能除草机、挤奶机器人、农业自动化与控制系统等。2013—2018年,农业机器人SCI论文作者来自全球52个国家,其中数量最多的前10个国家依次是中国、美国、西班牙、德国、澳大利亚、荷兰、以色列、意大利、英国和日本。中国增势最为强劲,年度农业机器人相关论文数量从2014年开始超过美国跃居第一。从研究热点来看,中国更关注收获机器人、采摘机器人和农业施药无人机的研究,而美国、澳大利亚、荷兰和英国等更关注挤奶机器人,以色列和日本较为关注收获机器人,德国与意大利关注喷灌机器。
国外农业人工智能研究起步早,技术较完善,各种智能装备发展也较全面,国内对农业人工智能的研究起步相对较晚,且大多处于理论研究阶段。目前,国内很多研究机构和企业在探索无人农场,建设了无人农场的示范区。例如广州极飞科技将农业无人机、遥感无人机、农业无人车、农业物联网、农机自驾仪、智慧农业系统等最前沿的技术带到了一些农村地区,试图改变盲目、粗放、效率低下的农业生产方式,提升生产效率。
3.3 我国面临的挑战
农业人工智能技术已成为合理利用农业资源、提高农作物产量和品质、降低生产成本、改善生态环境、实现农业可持续发展的前沿性农业科学研究热点。我国农业正处于由传统农业生产技术向现代农业技术转型的阶段,发展农业人工智能技术还存在诸多挑战。
3.3.1 技术落后 技术上与发达国家的差距导致我国农业自动化程度和集约化水平较低,容易在农业人工智能基础理论、核心算法以及关键设备、高端芯片、重大产品与系统、软件与接口等方面形成短板。例如已有农业传感器种类较少,缺失作物本体信息传感器,且传感器的关键零部件都需要从国外进口。
在农业数据分析领域,主要是基于模式识别和深度学习的农业应用,如病虫害识别等,基于过程分析的数据挖掘技术研究比较缺乏。农业大数据挖掘是从大量的、不完全的、有噪声的、模糊的、随机的农业数据中提取出隐含在其中的、人们事先不知道的、但又是有潜在有用的农情信息和作物生长规律的过程。农业大数据分析中,具有挑战性的是基于过程分析和历史信息的农作物生长预测的问题。
基于无人机遥感实现精准农业航空施药或播种,是精准农业领域的关键技术。目前无人机施药作业还未实现真正的变量喷施,其中一个原因是无人机作业处方图的生成技术尚未成熟。要生成无人机作业处方图,需要对无人机遥感图像进行农情分析并建模。但不同作物以及不同生长周期的作物生长形态迥异,农情分析模型不具备通用性,限制了精准化作业的发展。
3.3.2 基础设施不够完善 适应农业人工智能发展的基础设施如农业物联网,政策法规如农业数据共享机制,标准体系如农事作业标准等方面亟待建设和完善。
3.3.3 人才缺乏 农业科研投入、相关领域人才储备缺乏,人工智能尖端人才远远不能满足需求。
面临上述挑战,需要我们构建开放协同的农业人工智能科技创新体系,布局建设重大科技创新平台,坚持农业人工智能研发攻关、产品应用和产业培育“三位一体”的发展模式,推进农业人工智能技术的发展和应用。
4 我国发展农业人工智能的对策与建议
农业人工智能技术发展对提产增收、加快作业效率和资源利用率的驱动作用明显,正在引领现代农业发展方式发生深刻变革。发展农业人工智能,对我国来说既是挑战也是机遇,要后来居上,赶超先进技术,研制工作应走引进吸收、借智创新、超越提高的路线,以尽快形成顺应我国农情的研究-创新-应用体系,满足农业发展对农情监测、农业数据分析、农业装备转型升级、农产品供销链追踪等的要求,提高农业智能化水平,推动农业现代化发展,在农业人工智能方兴未艾的蓝图中发挥“头雁效应”,为人类农业智能化时代添砖加瓦。综合上述分析,对我国农业人工智能发展做出如下建议:
1)注重人工智能相关专业人才的培养与管理。推动科技发展的根本是人才。国内农林类高校要根据智慧农业的发展趋势进行专业改革,以满足未来智慧农业产业对新型农业科技人才的需求。此外,应积极鼓励支持企业培养既懂人工智能又有农业背景的复合型人才,解决农民的实际问题,为农业领域推广人工智能等新技术提供智力和人才支持。在科学研究和团队建设方面,鼓励建立多学科交叉融合的研究团队。
2)推进农业人工智能发展的基础设施建设。农业人工智能的发展离不开海量数据积累以及网络实时响应。大田农业基础设施不够完善,农业数据获取成本很高,极大地限制了机器学习在场景中应用的广度和深度。应该注重推进农业物联网和农村5G基础设施建设,提高智能农业传感器等基础设备供给水平,建设农业生产信息化和数字化工程,出台农业数据共享机制等,为人工智能农业装备的大规模应用提供基础和条件。
3)推进农业生产智能管控技术研发。推进农业生产智能感知、识别与作业决策模型的研发,针对农业种植、养殖不同环境下的应用场景,建立基于多源数据融合的农业全过程决策支持方法,构建田间作物、温室、畜禽、水产等领域全产业链条的决策管理和智能控制模型,利用云-边-端的架构,实现基于数据驱动管理下的“农业大脑”智能决策体系。
4)加强智能装备和系统的研制。针对农业生产需求,加快智能机器的普及步伐,提高资源利用率和农业产出率,提高经济效益。培育我国优势智能农机如农业无人机,增强农业与其他产业的跨界技术融合,迎接新一代信息技术,开启创新模式,无缝整合人类智慧与机器智能,重新评估农业未来,创造新商机。首先,研发专用型设备,应考虑降低成本和提高适应性,硬件方面,机器人和无人机等智能设备上的传感器可根据实际情况增减,控制部分留置空余接口;软件方面,支持二次开发及扩展,为人机协同和多机协作提供良好平台。其次,基于云-边-端架构搭建“农业大脑”智能决策体系:云平台提供存储和计算服务,边缘计算对物联网端点上的机器人及其他设备实时动态管理,云边协同给农业机器人田间地头的作业提供决策支持。最后,未来农业机器人将承担越来越多的作业任务,成为农业生产中的关键组成部分。为此需要同时推动人工智能、物联网、大数据、虚拟感知系统、多传感器融合、人机交融等新技术的发展和应用。
猜你喜欢
今日农业(2022年1期)2022-11-16
今日农业(2022年3期)2022-11-16
今日农业(2022年2期)2022-11-16
今日农业(2021年14期)2021-11-25
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
商界(2019年12期)2019-01-03
IT经理世界(2018年20期)2018-10-24
小康(2017年16期)2017-06-07