
基于麦克纳姆轮的病房物资运送车
2020-11-30 09:05陈禹睿
科技资讯 2020年27期
陈禹睿
摘 要:基于幫助改进病房医护人员保护措施的想法,该项目研发了一种基于麦克纳姆轮的病房物资运送车,并已完成样机的开发、调试和测试。该项目设备可以在医护人员远程操作遥控下,非常灵活地进出隔离区和非隔离区间的狭小物资通道,并在病房和通道内以任何角度进行平移、滚转、原地旋转、行进等,实现医护人员无需近距离接触病患的情况下,病房物资的运送(例如每日若干次送入检测试管,运送出从病患身上采集的需要检测分析的各类分泌物样该)。由于采集病患分泌物(唾液、尿液等)进行分析、检测,以判断病患的病毒感染情况和病情治疗效果等是每天需要进行一次或多次的,因此,采用该项目设备可以极大地减少医护人员直接近距离接触病患和被感染的几率,同时,由于医护人员不需要进入病房隔离区,也可以大量地节省防护服、口罩、护目镜和手套等重要、紧缺的医疗物资。此外,该项目小车在从病房出来后(试管密封)或使用后(取走非密封的试剂盒),可以直接使用喷洒消毒药水、紫外线等最简单有效的方式进行快速消毒处理,减少了医护人员接触感染的风险,节省了医疗物资,同时也提高了工作效率。
关键词:麦克纳姆轮 单片机 固件 2.4G
中图分类号:TP23 文献标识码:A 文章编号:1672-3791(2020)09(c)-0073-08
Abstract: Based on the idea of helping to improve the protection measures of ward medical staff, this project has developed a kind of ward material delivery vehicle based on Mecanum wheel, and has completed the development, debugging and testing of the prototype. Under the remote control of medical staff, the equipment of the project can enter and exit the narrow material channel in the isolation area and non isolation area very flexibly, and can translate, roll, rotate and travel in place in the ward and channel at any angle, so as to realize the delivery of materials in the ward (for example, several times a day into the test tube) without close contact with patients, Deliver all kinds of secretion samples collected from patients that need to be tested and analyzed). Because it is necessary to collect the patient's secretion (saliva, urine, etc.) for analysis and detection to judge the virus infection situation and treatment effect of the patient's condition once or more times a day, using the equipment of this project can greatly reduce the probability of medical staff's direct close contact with the patient and being infected. At the same time, medical staff do not need to enter the ward isolation area. It can also save a lot of important and scarce medical materials such as protective clothing, masks, goggles and gloves. In addition, after the trolley of the project comes out of the ward (sealed test tube) or is used (unsealed reagent box is taken away), the simplest and most effective way such as spraying disinfectant solution and ultraviolet ray can be directly used for rapid disinfection treatment, which reduces the risk of contact infection of medical personnel, saves medical materials, and improves work efficiency.
Key Words: Mecanum wheel; MCU; Firmware; 2.4G
出于改进病房医护人员保护措施的目的,我们开发了一种基于麦克纳姆轮的病房物资运送车,可以在医护人员远程操作遥控下,灵活地进出病房区域的狭小物资通道,并可以以任何角度进行平移、滚转、原地旋转、行进等,实现医护人员无需近距离接触病患的情况下,完成病房物资的运送。论文给出了该产品的设计方案、关键技术和核心部分的实现方法,并通过实测结果的比较验证了该产品的实际效果,以及相比现有产品的改进情况。
1 选题背景
1.1 需求背景
医院的医护人员是接触病毒、病菌最多的群体,也感染率最高的人群。特别是在疾病流行期间,因为病患们的数量与日俱增,加上病毒、病菌的高传染性,在人员繁杂的工作环境下,再完备的保护隔离措施也免不了医护人员和病患们的密切接触。长时间的工作和超负荷的劳动量使得医护人员的身体和精神受到了双倍的考验,身体免疫力也会因此下降。再加上长时间与病患密切接触,会使得医护人员更容易感染病毒。救治病患虽然是医护人员的天职,但是医护人员的身体健康、生命安全更为重要。医护人员自身没有得到好的健康保障的话,病患的救治就会停滞不前,会造成更严重的损失。所以,在关注病患救助的同时,也要关注医护人员的健康与否,我们应该尽自己所能去帮助他们。
经过多方资料收集和调研,我们发现在当前的临床实践中,有大量的医护人员需要近距离接触病患,而在有一些场合下,特别是病患可以自理的情况下(如大量的非ICU轻症病患、疑似病患等),病患可以自己进行药物的服用,以及每日需要一次或多次检测的唾液、尿液等分泌物样本的采集,只需要将药物送到病床边以及将采集的样本送交病理即可。这部分的工作并不一定需要由医护人员推着手推车来进行,而是可以使用机器人进行。同时,还需要考虑到部分地区病患数量较多,病房为了收治更多的病人,尽可能地加大了病房的负荷人数,导致病房的通道更为狭窄,此外,隔离区和非隔离区间的物资通道一般也是十分狭小的。因此,即使使用机器人方式进行物资运送,对机器人的体积、灵活性、可控性也是有着特殊要求的。
因此,经过进一步调研现有方案和技术情况、以及它们的优缺点,该项目规划、设计了一种基于麦克纳姆轮的小车,用于在病房运送物资,减少医护人员接触病患的几率,降低医护人员被传染的几率,节省医疗物资,方便消毒处理,提高整体工作效率。
1.2 技术背景
通过调研和讨论,针对项目目标,该项目选择了麦克纳姆轮作为该项目小车最重要的部件。麦克纳姆轮是一种特殊结构的轮子,基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。
依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑、运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便地实现全方位移动功能。
考虑到麦克纳姆轮的上述优点和特点,以及该项目的实际需求和应用场景、环境情况,该项目的病房物资运送车选择了基于麦克纳姆轮来实现可遥控的物资运送车。同时,综合考虑了时间进度和技术难度,该项目选择了相对较为容易实现,技术上也比较成熟的2.4G无线通信技术和STM32芯片作为电子学部分的主要载体,并在整体设计时为以后的升级预留了蓝牙模块硬件,方便以后进一步的升级和改进。最终,该项目所实现的物資运送车可以遥控控制,非常灵活的进行全向移动(平移、滚转、旋转等)而不需要进行传统的转弯,可以在很小的移动空间中进行灵活的移动,其移动灵活性也将优于需要原地旋转的履带小车或者万向轮小车(某些情况下可能没有足够的空间进行原地旋转),适应通道、空间最小化的病房和狭小物资运送通道的应用场景。在病房临床实践中,医护人员只需要在隔离区外的安全地区对小车进行遥控即可,尽量减少医护人员同患者的接触,大大降低医护人员被传染的几率。
2 现有的技术和方案情况
经过对所收集到的资料的整理和理解,我们发现现有的实现方案,主要是医护人员穿戴全套防护服,推着手推车进出隔离区或病房进行物资的运送,这个方案所存在的缺点包括以下几个方面。
(1)医护人员每日频繁且近距离接触大量的病患,容易被传染。
(2)医护人员每日多次进出隔离区或病房,需要消耗较多的紧缺医疗资源(口罩、护目镜、防护服)。
(3)医护人员有体能限制,其工作时长有限,且穿脱防护服及反复消毒也耗费极大体力。
(4)医护人员会产生心理压力,长期会影响工作情绪和健康。
(5)医护人员如果被传染,自身也成为病患,则需要投入更多的医疗资源来治疗医护人员本身,在疾病爆发的时期出现这种情况会使得原本不充裕的医疗资源雪上加霜。
通过对现有技术方案进一步调研,我们发现除了传统的人工推手推车的方式进行物资的运送之外,部分场景也在使用普通小车机器人方案进行物资运送,这个方案所存在的缺点包括以下几点。
(1)对于使用普通转向轮的小车,存在转弯半径的问题,在狭小的空间、通道内可能会没有足够的空间进行转弯。
(2)对于使用驱动轮+万向轮的小车,同样也可能存在转弯半径的问题。
(3)对于使用履带的小车,虽然通过原地旋转来规避转弯半径的问题,但是在存在负载物体的情况下,非圆形的负载有可能会在旋转期间碰撞到其他地方。
(4)在需要多小车协同工作,承担负载的场合无法使用。
3 该项目的实现方案
3.1 项目目标和效果
该项目基于麦克纳姆轮的病房物资运送车,可以在医护人员远程操作遥控下,非常灵活地进出隔离区和非隔离区间的狭小物资通道,并在病房和通道内以任何角度进行平移、滚转、原地旋转、行进等,实现医护人员无需近距离接触病患的情况下,完成病房物资的运送(如每日若干次送入检测试管,运送出从病患身上采集的需要检测分析的各类分泌物样本)。
该项目样机具体实现了以下功能。
(1)实现基于麦克纳姆轮的病房物资运送车和遥控器,可以非常灵活地运动(各种角度的平移、滚转、旋转),云台可运动,可使用遥控器来控制小车做出以上运动。
(2)运送车的云台上可携带试剂盒及一定量的试剂样本。
(3)运送车在操作者的无线遥控下,可以在狭窄的空间和通道内自如地运动。
由于采集病患分泌物(唾液、尿液等)进行分析、检测,以判断病患的病毒感染情况和病情治疗效果等是每天需要进行一次或多次的,因此,采用该项目的设备可以极大地减少医护人员直接近距离接触病患和被感染的几率,同时,由于医护人员不需要进入病房隔离区,也可以大量地节省防护服、口罩、护目镜和手套等重要、紧缺的医疗物资。此外,该项目小车在从病房出来后(试管密封)或使用后(取走非密封的试剂盒),可以直接使用喷洒消毒药水、紫外线等最简单有效的方式进行快速消毒处理,减少了医护人员感染的风险,节省了医疗物资,同时也提高了工作效率。
该项目设计的运送车可以在拥挤狭窄的走道内进行任意角度的平移,使它在运送物品时相比普通小车有着一定的优势(无需转弯,因此就不需要转弯半径)。在爆发疾病的形势下,病房内有可能塞入更多的病床,使得通道更为狭窄,这种情况下,普通小车只能通过原地旋转来减少转弯半径,但如果载荷物体或者小车本体形状为长方形(非圆形),原地旋转也有可能会触碰周围物体,而该小车无需进行旋转即可通过水平移动从通道中间方便地“挤”过去。
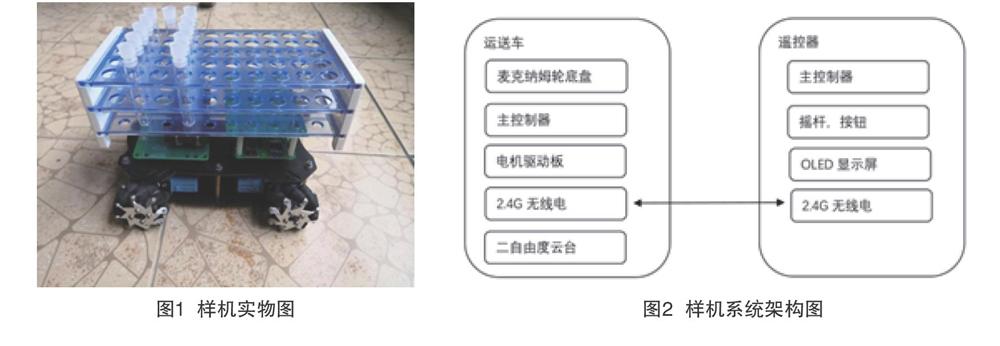
结合现实,制作出来的样机情况(图1为样机实物图),该项目样机相比现有技术和方案具有以下优势。
(1)运送车是机器人的一种,不会被传染,生物体的细菌病毒对于机器人没有任何作用。
(2)操作人员可以在安全的区域内对小车进行无线遥控操纵,使用了该方案后可以大幅度减少医护人员近距离接触病患的几率,从而保护了操作人员,防止被传染。
(3)机器人不会有心理压力,不会出现心理问题。
(4)机器人不会因长时间、反复重复同样工作而出现疲劳。
(5)机器人的消毒更方便,消毒成本更低。
(6)大幅度减少了口罩、护目镜、防护服等重要医疗物资的消耗。
(7)該项目实现的运送车不存在转弯半径的问题。
(8)该项目实现的运送车还可以用于移动一些无法原地旋转的负载(例如一个会跨过病床两侧的结构,比例如恢复架等,这样的结构只能平移而不能旋转)。
(9)多台该项目实现的运送车还可以多机协同运作。
3.2 项目关键技术
项目样机上完成了以下关键技术的实现工作。
3.2.1 对麦克纳姆轮的矢量控制
麦克纳姆轮的运动控制比较复杂,需要进行速度矢量合成才能得到最终的运动速度(矢量速度),因此需要在单片机中使用特定的算法对此进行计算。
3.2.2 2.4G无线电
该小车使用2.4G无线电进行遥控。使用自定义的通信协议、双向上下行通道,内容包括运动指令、云台指令,电池电压数据回传、报警、传感器数据回传等。该方案在器件选型时,决定使用的2.4G无线电芯片为24L01,该芯片是业界广泛使用的2.4G ISM芯片,具有价廉物美、供货量大、功耗低、采购方便、性能强大、工作稳定等诸多优点。
3.2.3 电动机调速
麦克纳姆轮需要对4个轮子分别进行调速控制,因此需要4路基于PWM的直流电机调速控制。通过单片机控制2片TB6612进行,每片有2路,一共4路。TB6612作为一款常用的直流电机调速芯片,具有价廉物美、供货量大、采购方便、性能强大、工作稳定、抗干扰能力强等诸多优点。
3.2.4 STM32主控处理器
8、16、32位单片机的选择很多,通过对各种单片机功能、性能、编程难度的综合了解,该项目最终选择使用STM32作为主控处理器,该处理器在业界广泛使用,具有价廉物美、供货量大、采购方便、性能强大、工作稳定、抗干扰能力强等诸多优点。
3.2.5 单片机固件的实时性、可靠性设计
考虑到编程难度和可扩展性,该项目使用了FreeRTOS,可以使用1片STM32来同时进行4个轮子的控制、云台控制、传感器监控以及无线电通信。FreeRTOS是一款业界广泛使用的RTOS,具有免费、性能强大、工作稳定、占内存小等诸多优点。
3.2.6 蜂鸣器
样机实现时,还在运送车上加装了1个蜂鸣器,可以发声,作为启动设备的提示。
3.2.7 方便实用的操控界面
结合赛车游戏的操控方法,最终确定遥控器采用摇杆手柄的形式提供,这样操作人员可以像打游戏一样操控小车做出平移、滚转、原地旋转、云台旋转等诸多操作。遥控器还具备一个OLED显示屏,可以实时显示小车的状态,电池电压等信息。这样一来,系统就十分容易上手操作,且使用方便、人性化,有助于产品到位后,快速投入使用,节省了操作人员学习和熟悉使用的过程。
3.3 项目产品的系统架构
系统分为2个部分:运送车和遥控器,见图2为样机系统架构图。运送车和遥控器的主控制器均采用Stm32单片机,性能强大,可扩展性好,价格合适。
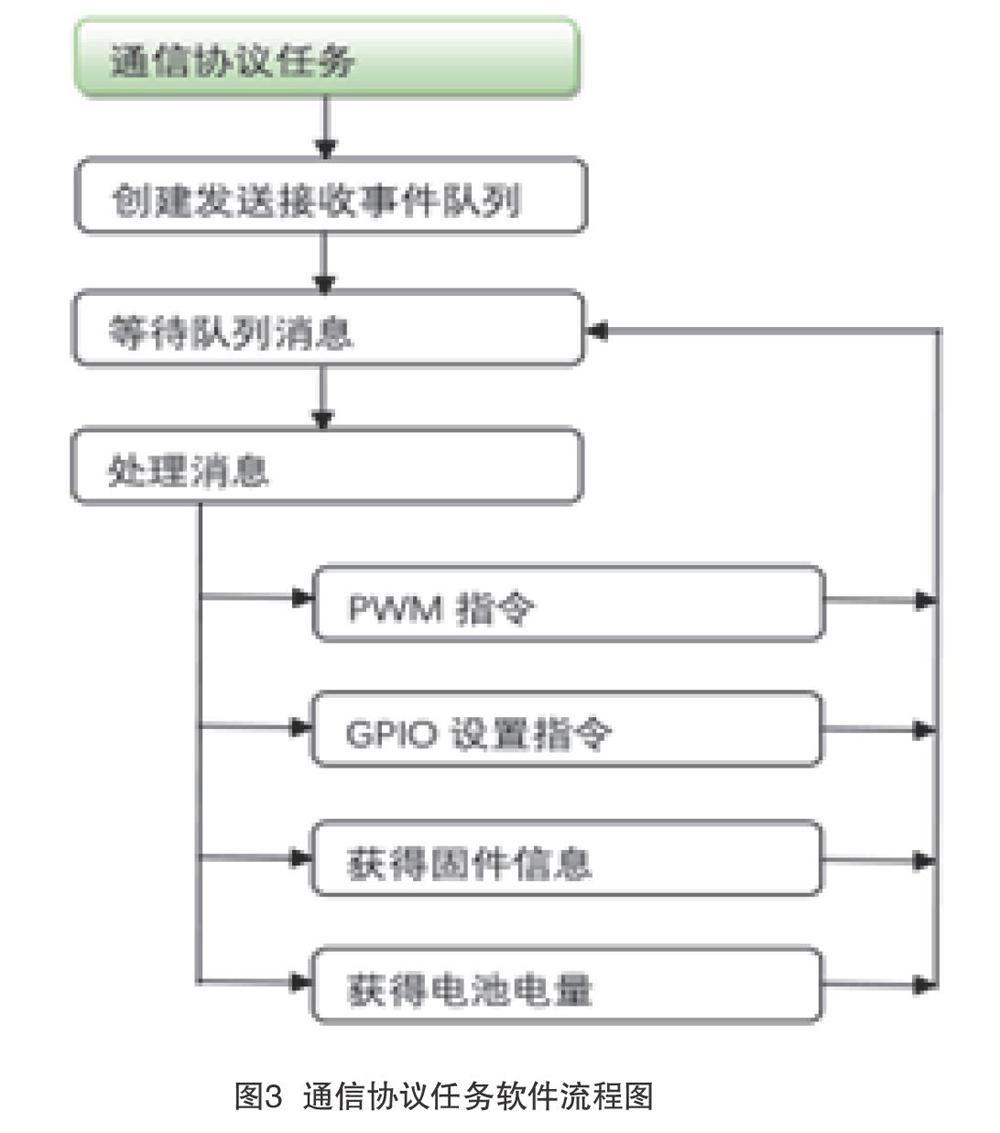
3.4 软件部分设计
软件部分使用RTOS作为操作系统平台,以及多任务并行方式。各主要任务软件流程见图3至图5。
3.5 硬件电路设计
主控部分的原理图设计见图6。
电机驱动部分的原理图设计见图7。
IO接口部分原理图设计见图8。
4 该项目的创新性
结合样机调试、测试过程和实际使用效果,该项目具有以下技术和应用创新性。
(1)相对于传统解决方案(医护人员推手推车),该方案由于使用了可以遥控的小车,避免了医护人员直接近距离接触病患,降低了医护人员被传染的几率,达到尽量保护医护人员的效果。同时,不需要医护人员一天多次穿脱防护服、进出病房和消毒,节省了人力,提高了工作效率,降低了医护人员的工作强度,还可以将宝贵的医护人力资源投入其他必要场景中。
(2)该项目所实现的小车可以做出远超过普通小车的非常灵活的运动(尤其是水平移动)。在病房这样的场景下,通道往往非常狭窄,可以水平移动的小车在这样的场景下可以提高移动能力和工作效率。
(3)该项目实现的运送车可以非常方便的用消毒剂、紫外线等简单、高效、低成本的方式直接消毒,节约了口罩、护目镜和防护服等紧缺医疗物资。
(4)运送车不会被细菌、生物病毒等侵袭。
(5)利用该方案的运送车,通过多台小车协同工作,还可以制造出一种可以自主移动的病床,将4台小车垫在病床的4个脚上,可以将病床直接开走。而这种移动方式唯有该方案的小车可以做到,使用其他类型普通小车无法做到(必须要能够平移)。
5 相比现有技术和方案所能达到的改进效果
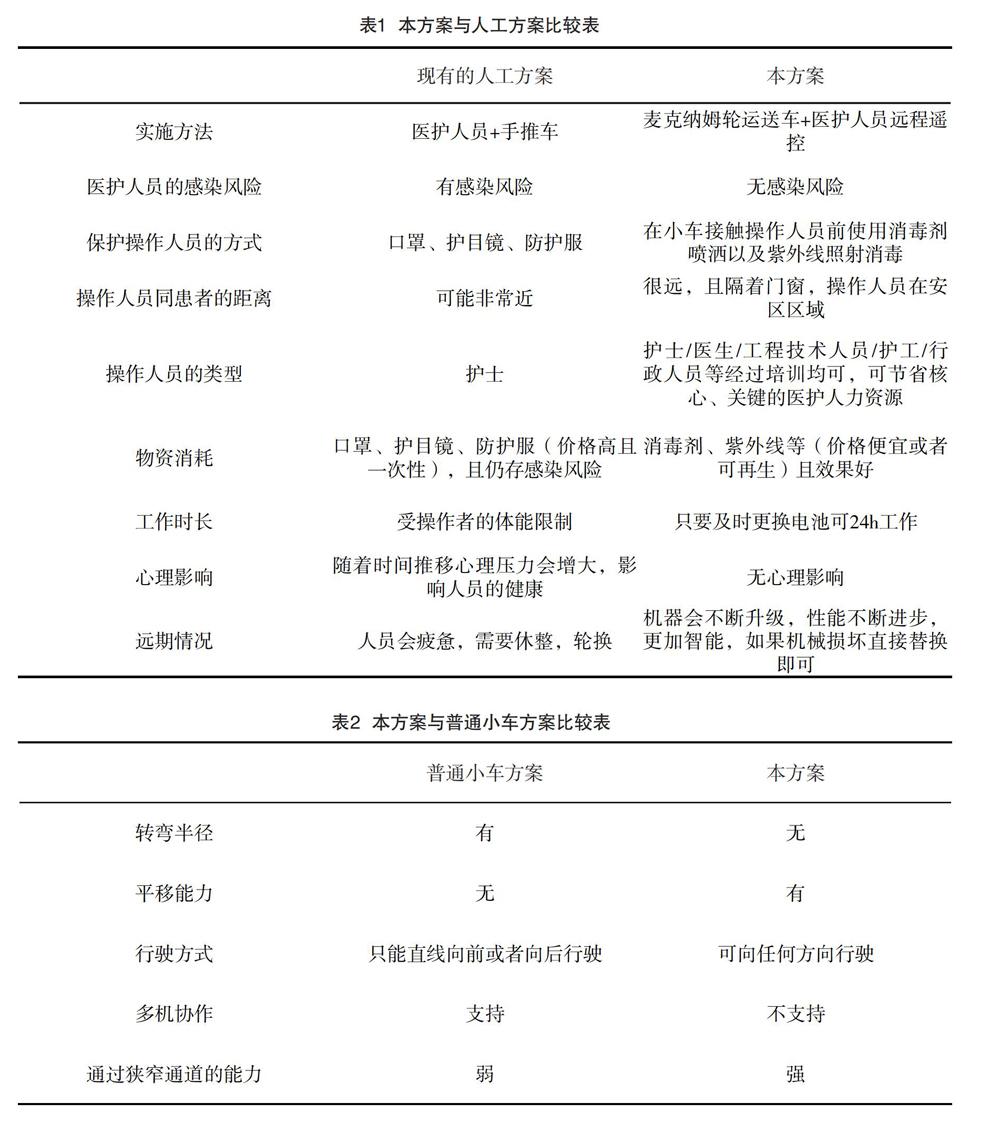
比对了现有技术和方案,该项目样机相对于人工方案有很大的改进效果见表1。
相对于普通小车方案也有一定的改进效果见表2。
6 该项目产品的预期应用领域
该项目产品主要考虑应用于狭小空间的医疗物资无人运送应用(病房垃圾通过狭窄通道的运送、医疗物资通过隔离区、隔离通道、隔离窗口等狭小区域的运送等)等。
通過发散性的交流和沟通,该项目产品通过放大体积、增加功率、多机协同工作、云台更换负载设备等方式,可以实现和支持很多应用场景需求,例如物流分拣、遥控行李箱、地下探矿、山洞探索、危险生物种群探测、墓穴考古等。
7 结语
当今国际形势错综复杂,全球环境气候变化导致生态圈发生变化,而我国又面临着人口老龄化、劳动力减少、天灾、瘟疫等重大威胁,因此,机器人在未来的各种领域中均会有作用。该项目所实现的物资运送车作为一种典型的轮式机器人,会在诸多领域发挥作用。
该项目关注于病房医疗领域的应用,提出了一种基于麦克纳姆轮的物资运送小车,可以在拥挤狭窄的病房以及通道中自如地通行,代替医疗人员进行物资运送,减少了医疗人员接触病患被传染的几率,节约了口罩、防护服等消耗性物资的使用。
参考文献
[1] 朱向庆,何昌毅,朱万鸿,等.基于STM32单片机的通信技术实验系统设计[J].实验技术与管理,2019,36(8):81-84.
[2] 董莹.ARM技术在步进电机控制系统中的设计研究[J].佳木斯大学学报:自然科学版,2019,37(1):36-38.
[3] 王昊天,于乃功.基于STM32的步进电机多轴速度控制方法研究与实现[J].计算机测量与控制,2019,27(9):95-99,108.
[4] 卢振羽.基于LabView的一款扭矩检测装置的开发[J].机电信息,2019(21):120-121.
[5] 刘栋.基于硬件跟踪的Linux系统性能优化[J].电子产品世界,2019,26(3):35-36.
[6] 严宏君,左天予.软件测试过程管理及文档生成工具设计与实现[J].电脑编程技巧与维护,2019(7):66-68.
[7] 丁宁,陆翔宇,史鹏博,等.智能电能表嵌入式系统的新型知识产权保护方法[J].电测与仪表,2019,56(4):142-146.
[8] 易先军,彭萌,耿翰夫,等.四麦克纳姆轮式小车控制系统的研究[J].自动化与仪表,2019,34(5):19-22,26.
[9] 蒋睿杰,穆平安.基于麦克纳姆轮的全向AGV控制研究[J].电子测量技术,2018,41(8):74-78.
猜你喜欢
阅读(低年级)(2022年6期)2022-06-17
阅读(低年级)(2022年3期)2022-03-30
知识窗(2021年4期)2021-10-02
健康体检与管理(2021年10期)2021-01-03
环球时报(2020-12-03)2020-12-03
健康必读·下旬刊(2020年7期)2020-10-14
安徽文学(2020年3期)2020-03-28
特别健康·下半月(2019年7期)2019-07-29
悦游 Condé Nast Traveler(2018年3期)2018-05-14
求是学刊(2017年6期)2018-01-10
