
智能车车速最优控制策略与算法研究
2020-12-01 13:42张丽徐海钦王子文王福忠张涛
河南理工大学学报(自然科学版) 2020年5期
张丽,徐海钦,王子文,王福忠,张涛
(河南理工大学 电气工程与自动化学院,河南 焦作 454000)
0 引 言
无人驾驶技术已成为车辆发展的新趋势。为了推动国内无人驾驶技术发展,全国大学生智能汽车竞赛[1-3]应运而生。在往届比赛中,最为经典的项目就是四轮组的竞速项目。在智能车控制系统中,赛事所允许使用的摄像头与控制器性能有限,采集到的图像无法有效滤除由光照和失真所带来的错误信息,使图像处理的结果影响车辆的行驶路线[4-6],从而间接影响比赛成绩。通常,车辆转向时冲出赛道有两个原因:一是比赛限定了舵机型号致使其性能受到局限,无法正常转向;二是车速和转向无法有效关联并进行控制[7]。
为了有效提高智能车车速,本文结合智能车电机控制特点,采用灰度摄像头进行图像处理与路径识别,通过逆透视变换[8-10]得到理想赛道图像,与速度环构成串级控制;利用编码器进行测速,由陀螺仪检测车身姿态在特殊元素处及时降低速度,使车辆在高速行进的同时保持稳定;最后通过人工蜂群算法[11-12]整定出最适控制器参数,利用PID控制器[13-14]对电机转速进行串级[15]闭环控制,使车辆以最优状态和最短时间完成比赛。
1 智能车控制系统结构
以全国大学生“恩智浦”杯智能汽车竞赛指定参赛车模——博思威龙B型车模为研究对象。经过设计改装后,该车模的参数为:车长285 mm,车宽180 mm,车高400 mm,质量约1 kg。智能车硬件控制系统结构如图1所示。系统采用恩智浦公司提供的微处理器作为核心主控芯片,利用多路电源对各个模块独立供电,矩阵按键用于发车初始化设置。采用CMOS摄像头感知车体与路面的相对位置信息,通过对竞赛赛道图像提取、识别和处理,实现循迹功能。此外,车辆还装有姿态检测陀螺仪和编码器,这些传感器配合使用,能够准确检测出车辆状态并对电机和舵机进行控制,使车辆始终处于设定状态运行。蓝牙模块和OLED用于显示车辆采集到的信息,使数据可视化。

图1 智能车控制系统结构图
2 控制策略设计
智能车车速控制的方法已经被研究多年,应用最为广泛的就是通过图像识别行车路径,控制舵机转向实现循迹,再通过位置式PID对后轮电机实现速度的闭环控制[16]。但是,这种方向开环与速度闭环的控制在车辆速度较低时效果较好,而速度一旦过快,就会出现转向不及时或者速度出现超调或滞后调节,导致车辆无法继续按照摄像头所得图像的规划路径继续行驶,从而导致完成比赛时间过长,甚至冲出赛道无法正常完成比赛。目前,在智能车四轮组竞速中,由于赛道类型多样且复杂(图2),比赛中车速控制十分关键,已成为影响比赛成绩的决定性因素。为此,本文采用车辆转向与速度调节相关联的方式,对速度调节使用蜂群算法[17-18]整定PID参数,实现电机转速的最优控制,并进一步缩短比赛时间。

图2 赛道元素示意图
基于图2的赛道元素,本文以智能车不冲出赛道且稳定运动为前提,完成赛道各个元素的识别,实现直道加速、弯道减速的动态速度控制目标。智能车在行驶过程中的姿态和速度均需要检测,具体控制策略流程设计如图3所示。
控制过程如下:
(1)采用灰度摄像头对赛道进行图像识别,得到图像信息之后,根据图像灰度分布直方图确定动态阈值参数,减小光照强度对于图像的干扰,再利用逆透视变换将图像转变为俯视图,然后进行赛道边界线提取,获得车辆准确位置,与主控制环速度环构成串级控制。
(2)正确获得车辆位置及运行状态后,由PD控制器控制舵机转向,PI控制器控制电机转速,舵机的转向系数与当前电机转速呈正相关关系,即车速越高转向系数越大。
(3)对电机进行速度闭环与方向开环串级控制,速度环的PI控制器参数由人工蜂群算法进行动态整定,保证车辆无论是在直道加速还是在弯道减速,都能够稳定沿车道中线运动。
3 算法实现
3.1 动态阈值设置
在车辆行驶过程中,光照强弱以及地面蓝布反光,都可能使固定阈值的图像传感器无法准确获得赛道信息,故采用灰度摄像头,采集到的图像含有256个灰度级,信息丰富,根据灰度直方图的灰度级分布确定阈值。图4为灰度摄像头采集到的原始图像与处理后的二值化图像,图5为原始图像灰度分布直方图。直方图的横坐标是0~255个灰度值,纵坐标是对应灰度在一帧完整图像中出现的概率。其概率P(Sk)计算式为

(1)
式中:Sk为灰度级数;nk为该帧图像灰度级为Sk的像素点个数;n为该帧图像像素点的总数。
从图5可明显看出,摄像头接收到的图像灰度值在80~120分布较多,可以判断为白色赛道,灰度值更低的区域则为黑色边界和界外蓝布,灰

图4 灰度图像与二值化图像

图5 图像灰度分布直方图
度值更高的区域则是由于赛道不同程度反光所造成的亮度过高。根据这幅图像,选择灰度值120作为此时的摄像头阈值,从而解决反光问题。
3.2 逆透视图像处理
为了更好地获得图像信息,采用逆透视变换法对图像进行处理,使图像按照透视旋转定律变换,将其矫正成正投影形式,这样得到的图像有效信息要远大于变换之前的原图像。具体过程如下。
首先,确定摄像头参数。采用实测方法得到智能车摄像头参数,其中仰角θ为23°;中心高度H为37 cm;视点到视平面距离d为87 cm。
其次,求世界坐标PW。设摄像头图像坐标为PG=(x,y,z,1),并由世界坐标与图像坐标的关系建立矩阵方程,

(2)
将图像坐标代入式(2),求得世界坐标的矩阵,即

(3)


(4)
最后,处理图像。由于所处理的赛道图像是二维平面图像,故图像深度恒为0。根据式(4),只要把二值化后的二维数组的横纵坐标代入,即可求得世界坐标下的坐标值,即变换后的俯视图坐标。实际比赛时,如果不对所采集的赛道图像做处理,赛道图像失真后将会影响智能车比赛成绩。本文选取赛道中一个直角弯道进行说明,根据式(4),将摄像头识别得到的失真图像进行逆透视变换,图像变换前后的效果如图6所示。对比图6(a)~(c)可以看出,经过逆透视变换后的图像与与实际更加相符,更能反映出赛道的真实信息。

图6 赛道图像变换前后效果对比
3.3 蜂群PID参数整定
在速度的闭环控制中,采用PI控制器,将人工蜂群算法加入速度闭环控制系统[19],最优整定PI控制器的参数,步骤如下。
首先,通过试验计算车辆的直流电机传函,
G(s)=33.16/(1.87s+1)。
(5)
其次,用两种不同的稳定判据方式,劳斯稳定判据和奈奎斯特稳定判据,求得PI控制器参数的变化范围表1,蜂群算法参数设置见表2。
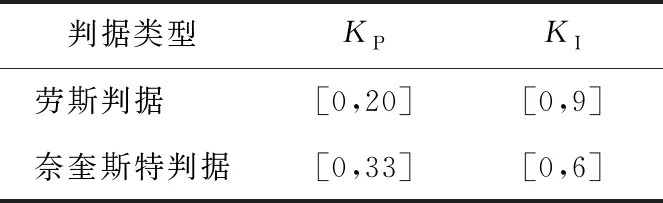
表1 PI参数变化范围
最后,对设置的两组参数分别在两种增益变化范围内进行仿真实验,结果如表3所示。

表2 蜂群参数设置

表3 参数整定结果
4 仿真与试验
4.1 仿真测试
对图像进行阈值设置和透视变换后,就可以进行图像中心的推算。对赛道边缘点进行提取,通过边沿数据推算中心,再加入折点求取判断,计算出的中心点效果如图7所示。

图7 赛道中心推算效果图
准确计算出中线后,将每幅图像的中线位置与速度PID的设定值相关联构成如图8的二次曲线关系,具体函数关系如式(6)所示。

图8 设定速度与转向偏差曲线
Speed.SetValue=HighSpeed-(59-Control)^2×
(HighSpeed-LowSpeed)/2431,
(6)
式中:Speed.SetValue为设定速度;HighSpeed为最高速;LowSpeed为最低速;Control为中线位置。
智能车在行进过程中,由于速度设定和车辆偏离赛道中线的偏差呈函数关系,故速度设定值也是处于不断更改的状态。同时考虑到阶跃信号对于系统稳定性的考验较为严峻,故采用阶跃信号模拟设定值的改变来仿真整定后的PI控制系统,结果如图9所示。其中,传统PID参数采用表3中的参数,该参数通过固定电机的传函得出,而本文控制方式使用的参数范围采用表2数值。

图9 阶跃响应仿真曲线
从图9可以看出,在劳斯判据和奈奎斯特判据下,蜂群PID均比传统PID的超调量小,控制效果更好。再对比两种判据下的响应情况可知,基于劳斯判据下的蜂群PI控制器效果好于奈奎斯特判据下的蜂群PI控制器,超调量和调节时间均小于奈奎斯特判据下的蜂群PI控制器,且响应快,故选取基于劳斯判据下的参数范围作为整定结果在实际控制器[20]中使用。
在实际比赛中,由于赛道材质和赛道元素的多样化,导致车辆在不同位置时的传函并不完全相同。在这种情况下,传统的PID就无法很地好适应不断变化的传函。但是,本文所采用的蜂群PID控制算法,参数是不断变化并加以整定的,可以更好地克服由于传递函数改变而引起的扰动,适应性比传统PID更强。
4.2 试验测试
试验中,测试所用的智能车实物如图10所示,测试环境赛道如图11所示。测试赛道全长36 m,含有直道、S弯、环岛等各种元素。测试选取两种方案:一是赛道全程测试;二是赛道特殊元素测试。然后,将传统控制方式与本文提出的速度图像优化关联控制方式进行对比。

图10 智能车实物图

图11 实际测试赛道
4.2.1 赛道全程试验
测试时,选取晴天(自然光照射)、阴天(自然光+灯光照射)和黑夜(灯光照射)3种环境,对不同控制方式下的车速各进行150次测试,分别记录每圈的平均速度、碾压路肩的次数和停车的距离,求取150次的平均值作为数据采集的最终结果,如表4所示。
从表4中可以看出:(1)在相同测试环境下,传统控制方法的平均车速均慢于本文控制方法的平均车速,在晴天约慢0.24 m/s,在阴天约慢0.25 m/s,在黑夜约慢0.18 m/s;(2)在相同控制方法下,对比不同赛道环境的平均车速发现,传统控制方法在黑夜环境中的速度可达到2.65 m/s,但在晴天和阴天环境中的速度只有2.55 m/s和2.56 m/s,说明传统方法下车速控制受环境影响较大,而本文控制方式的速度较为稳定,在3种环境中的速度都在2.8 m/s左右;(3)在相同测试环境下,传统控制方法控制的车辆仍然存在碾压路肩的情况,而本文控制方法则不存在。在停车距离方面,本文控制方法的停车距离相对较长,但是在竞赛过程中,停车距离不大于2 m即算作正常停车,该距离仍在正常范围内。
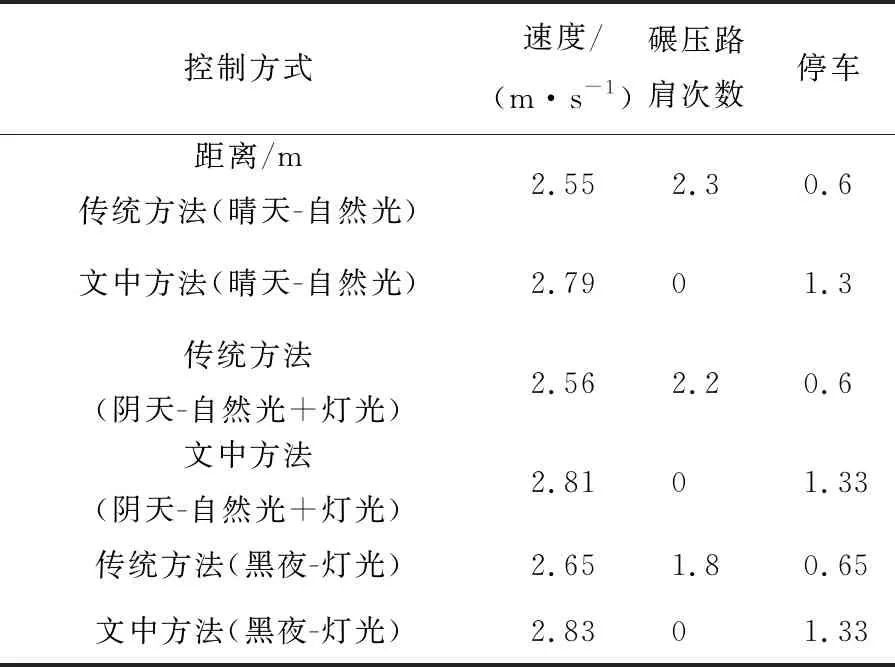
表4 赛道全程试验结果
4.2.2 赛道特殊元素试验
在赛道全程测试中,当车辆经过赛道特殊元素时,采集其瞬时速度,取平均值得到车辆通过特殊元素的速度,结果如表5所示。
从表5可以看出:(1)在相同测试环境下,智能车在通过特殊赛道元素时,采用本文控制方法下的车速快于采用传统控制方法的下的车速;(2)在传统方法控制下,智能车在晴天环境中通过赛道特殊元素的平均速度为2.1 m/s,在阴天和黑夜环境中的平均速度为2.2,2.4 m/s,波动较大。在本文方法控制下,智能车通过赛道特殊元素的平均速度2.6 m/s左右,相对比较稳定。

表5 特殊元素试验结果
综上,通过分析赛道全程试验数据和赛道特殊元素试验数据可知:(1)本文控制方法的平均车速快于传统控制方法的平均车速,且无碾压路肩现象,说明本文控制方法能够提高车速并且加强车辆的稳定性;(2)在通过赛道特殊元素时,本文控制方法也能够发挥良好的控制性能,使车速快于传统控制方法的车速,并且更加稳定;(3)在晴天、阴天和黑夜3种不同环境下的测试情况,说明了采用本文控制方法时,智能车的适应性得到很大的提高。
5 结 论
(1)本文控制策略能够在增强车辆稳定性的基础上,大大提高车速。在2018年智能车全国总决赛中,国家一等奖的平均速度为2.67 m/s[21],而本控制策略下实验室最快速度可达3.1 m/s,大幅提高了比赛成绩。
(2)本文研究的智能车速控制方式,将逆透视变换和蜂群算法相结合,对采集图像的阈值和失真做了进一步处理,使采集的赛道信息更加准确,增强了智能车对环境的适应性。此外,该算法将有助于人类在无人驾驶领域中对车速的精准控制。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
蜜蜂杂志(2020年11期)2020-12-20
小哥白尼(军事科学)(2020年4期)2020-07-25
中国信息技术教育(2020年2期)2020-02-02
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
现代计算机(2016年17期)2016-02-28
汽车维护与修理(2015年5期)2015-02-28
汽车电器(2014年8期)2014-02-28
