
LLC谐振变换器变论域模糊神经PI控制研究
2020-12-01 13:42胡治国胡宏伟艾永乐褚艳伟
河南理工大学学报(自然科学版) 2020年5期
胡治国,胡宏伟,艾永乐,褚艳伟
(1.河南理工大学 电气工程与自动化学院,河南 焦作 454000;2.珠海格力电器股份有限公司,广东 珠海 519000)
0 引 言
随着化石能源的大量使用,空气污染不断加重,人们一直在交通运输中努力使用清洁能源代替传统化石能源,新能源汽车应运而生。与传统燃油汽车相比,新能源汽车技术优势主要体现在车辆控制器(VCU)、电机控制器(MCU)和电池管理系统(BMS)[1]上。其中,在MCU中DC/DC变换器是其重要的组成部分。LLC谐振变换器作为DC/DC变换器中的一种,具有高效率、高功率密度等优点,并且即使在宽范围输入电压条件下,也具有非常好的稳压性能[2-4],已经引起越来越多人的关注。与目前应用较广泛的移相全桥变换器相比[5-6],LLC谐振变换器可以实现二次侧整流二极管零电流开关(ZCS)的目标,该特性解决了移相全桥变换器二极管反向恢复问题,使系统可靠性和效率得到提高。
目前LLC谐振变换器控制回路大都采用传统PI控制,但在该种控制下,当负载范围变化较大时难以获得良好的控制性能。目前,已有一些改进控制策略被提出:R.Oruganti等[7]提出的基于状态面分析的最优轨迹控制可以改善变换器动态性能,但是由于状态变量和运行方式的增加,使得变换器的轨迹控制非常复杂;JANG J等[8]提出的电流模式控制虽然对变换器的控制性能有一定的改进,但是需要额外增加采样回路对电流进行采样,增加了电路设计难度;H.Ma等[9]提出的滑模控制虽然提高了变换器的动态性能,但是却牺牲其稳态性能,引入了稳态误差使得输出电压偏高;S.A.Maryam等[10]提出了最小误差自动转换控制,该控制策略在系统参数匹配的情况下可以取得较好的控制性能,但在参数不匹配时便不能得到期望的控制性能。
模糊控制作为智能控制的一种,理论研究相对成熟,其控制也相对容易实现,已经获得广泛应用。针对全桥DC/DC变换器的控制,张文霞等[11]提出一种基于模糊PID控制的移相控制策略,取得了较好的控制效果。但目前对于模糊控制应用于LLC谐振变换器的研究很少。此外,传统模糊控制本身也有一些不足,主要表现在以下两个方面:首先传统模糊控制的隶属度函数在其论域上的分布是人为主观选定的,从而可能会导致其客观性不足,而神经网络具有较好的自学习能力,将其引入模糊控制可以实现对模糊控制隶属度函数分布的优化[12],进而改善模糊控制器的控制性能;其次传统模糊控制的论域是固定不变的,不能够随着输入量的变化而变化,导致其具有一定的局限性。李洪兴等[13]首次提出了变论域模糊控制的思想,即在模糊规则一定的条件下,通过伸缩因子实现模糊控制论域的伸缩变化,增加了模糊规则的利用率,提高了系统的控制精度。为了同时对模糊控制在隶属度函数分布和论域选取方面存在的不足进行改进,本文在模糊控制的基础上通过引入神经网络对模糊控制隶属度函数的分布进行优化,同时通过引入变论域伸缩因子提高模糊规则的利用率,设计出一种变论域模糊神经PI控制器,以期改善LLC谐振变换器的控制性能。
1 LLC谐振变换器拓扑结构及工作原理
全桥LLC谐振主电路拓扑结构如图1所示,其中,Q1~Q4和D1~D4分别为4个MOSFET管和4个晶体二极管,C1~C4为寄生电容。谐振电容Cr、谐振电感Lr和励磁电感Lm组成谐振网络,变压器变比为n,与变压器副边相连的二极管D5~D8组成全桥整流电路,Cf为输出电容,RL为负载。
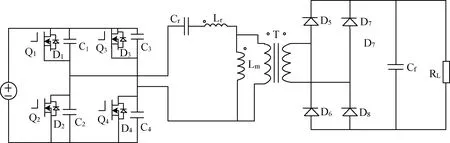
图1 全桥LLC谐振变换器拓扑结构
LLC谐振电路包括两个谐振电感Lr,Lm和一个谐振电容Cr,可以获得两种不同的谐振频率:

(1)

(2)
LLC谐振变换器通过改变变换器开关频率fs调节输出电压。根据开关频率fs与两种谐振频率的fr1,fr2的大小关系,变换器的工作状态可以分为fs>fr1,fr2 其中品质因数Q、电感比K、归一化开关频率fn、整流器交流端口等效电阻Req定义式分别为 (4) K=Lm/Lr, (5) fn=fs/fr1, (6) Req=8/π2RL, (7) 式中:fs为开关频率;RL为实际直流侧负载电阻。 当电感比K固定,品质因数Q值不同时,直流电压增益M随归一化频率fn的变化曲线图如图2所示。在图2中,按LLC谐振变换器能否实现软开关技术将变换器分为3种工作状态:状态一即图2区域一,变换器工作在感性状态,初级侧可以实现软开关技术,但次级侧无法实现软开关技术。状态二即图2区域二,变换器在感性状态工作,初级侧和次级侧的开关管都可实现软开关技术。状态三即图2区域三,变换器工作在容性状态,变换器初级侧开关管无法实现软开关技术,应避免LLC谐振变换器工作在此状态。 图2 电压增益曲线 从图2中可以看出,在区域一和区域二中变换器的直流电压增益随归一化频率单调递减。所以通过改变归一化频率即开关频率的大小,可以达到调节输出电压的目的。 为了实现对系统输出电压的控制需要,对LLC谐振变换器进行建模,以获得其传递函数。LLC谐振变换器传统PI控制原理如图3所示。 图3 谐振变换器控制原理图 图3中控制电路为电压环传统PI控制。变换器实际输出电压与期望值电压进行比较,经PI补偿回路后生成电压环路信号VC,压控振荡器VCO将VC转化成控制开关管Q1~Q4工作的占空比固定的脉冲频率信号。 系统的等效控制框图如图4所示。图4中,Gvf(s)为系统的功率级传递函数,H(s)为系统控制环路采样电压的传递函数,Gc(s)为PI补偿网络传递函数, Gc(s)=KP+Ki/S, (8) GVCO为压控振荡器增益。通常在控制回路中可以将压控振荡器GVCO和环路采样电压H(s)理解为线性常数。由此可以得到LLC谐振变换器频率与输出电压传递函数Gvf(s)的近似表达式[14] 式中:A为低频增益;wfs为低频极点;wesr为低频零点;wo与谐振参数有关。低频增益A可以表示为 式中:K为电感比;fr1为第一谐振频率;fn为归一化频率;Q为品质因数;vin为输入电压。 图4 系统控制框图 根据系统的控制框图,可以得到LLC谐振变换器PI控制系统开环传递函数的表达式为 T(s)=Gc(s)H(s)Gvf(s)GVCO。 (11) 结合模糊控制、神经网络和变论域控制原理,本文设计一种变论域模糊神经PI控制器,其结构框图如图5所示。 图5 变论域模糊神经PI控制结构框图 图5中,α(e),α(ec)分别为输入变量e,ec的论域伸缩因子,βP,βI分别为输出变量ΔkP,ΔkI的论域伸缩因子,被控对象为LLC谐振变换器电路。 本研究的目的是设计一种变论域模糊神经PI控制器,即对传统模糊PI控制器的隶属度函数分布和论域进行优化,因此首先对传统模糊PI控制器进行设计。本文中设计的模糊PI控制器为两输入两输出模式,两个输入量为输出电压实际值与输出电压期望值之间的偏差量e以及其偏差变化率ec。两个输出量为比例系数的调整量ΔKP和积分系数的调整量ΔKI,通过对ΔKP和ΔKI值的实时调节来对比例系数KP和积分系数KI的值进行调整,从而达到在系统运行状态发生变化时提高系统控制性能的目的。e,ec,ΔKP,ΔKI由[NB,NM,NS,ZO,PS,PM,PB]7个模糊子集构成,各个模糊子集分别代表[负大,负中,负小,零,正小,正中,正大]。其中e,ec论域设为[-3~3],ΔKP,ΔKI的论域设为[-6~6]。基于系统分析和专家经验来构造ΔKP和ΔKI的模糊控制规则[15],模糊控制规则如表1~2所示,ΔKP和ΔKI用于实时调整电压环PI参数。 首先将模糊PI控制器的输入量偏差e和偏差变化率ec的模糊子集NB,NM,NS,ZO,PS,PM,PB用[-3,-2,-1,0,1,2,3]来表示,模糊PI控制器的输出量ΔKP,ΔKI的模糊子集NB,NM,NS,ZO,PS,PM,PB用[-6,-4,-2,0、2,4,6]来表示,即把49条模糊规则清晰化转化成数据值。然后利用ANFIS对由模糊规则转化的数据值通过BP反向传播算法[16]进行训练,训练界面如图6所示。 表1 比例系数模糊规则 表2 积分系数模糊规则 图6中由模糊规则转化的数据值通过ANFIS使用BP反向传播算法进行50次训练后,误差稳定在一极小的值。 图6 ANFIS训练界面 通过ANFIS进行训练的过程相当于寻找从输入量e,ec分别到输出量ΔKP,ΔKI的非线性映射关系,从而自动生成新的隶属函数分布[12]。如以误差e到输出量ΔKI为例,通过ANFIS训练前和训练后e到ΔKI的隶属度函数分布如图7所示。 从图7可以看出,e到ΔKI的隶属度函数分布经过ANFIS训练后与训练前有明显不同,由于训练后得到的隶属函数在其模糊论域上的分布是模糊神经网络对基于专家经验制定出的模糊规则通过BP(反向传播算法)计算得出的,因此,新的隶属度函数分布是对原有的隶属度函数分布的优化,更加具有客观性。 图7 模糊神经网络训练前后隶属函数分布对比 上文虽然利用ANFIS对模糊控制器的隶属度函数分布进行了优化,但优化后的模糊控制器的论域依然是固定不变的,当输入量范围变化较大时会导致其控制精度降低。例如当选择的论域范围较小时,输入输出的调节范围会超出所选择的论域范围,从而导致系统超调,控制效果不理想;当选择的论域范围较大时,输入输出所使用的模糊规则的数量降低,导致控制精度下降[17-18]。因此,选择合适的论域不但能够提高控制精度,而且可以提高自适应能力。通过伸缩因子对论域进行实时调节,在系统范围内任意大小的输入都能对应到整个输入论域,使得控制器可以在总体模糊规则不改变的条件下,通过控制论域伸缩因子来实现模糊规则增加,从而增加控制器的自适应能力,达到提高系统控制精度的目的。变论域的原理如图8所示。其中E是误差论域值,α(x)是伸缩因子,x∈[-E,E],x是输入误差。 图8 变论域原理 本文采用基于函数设计伸缩因子的方法。对于伸缩因子α(x)函数的构造,应满足一些基本条件[19],其中论域值X∈[-E,E]: (1)对偶性。(∀x∈X),有α(x)=-α(-x)成立。 (2)避零性。α(0)=ε,ε为充分小的正数。 (3)单调性。α(x)在[0,E]上严格单调递增。 (4)协调性。x∈X,x≤α(x)E。 (5)正规性。α(±E)=1。 常用的输入输出变量的伸缩因子为 α(x)=(|x|/E)τ+ε, (12) (13) 式中,β(0)取0。 在本文中选取的输入输出变量伸缩因子为[20-28] α(e)=(|e|/3)0.6+10-5, (14) α(ec)=(|ec|/3)0.6+10-5, (15) βP=6|e|, (16) βI=1/(|e|+0.5)。 (17) 在MATLAB/Simulink中对系统进行仿真验证,LLC谐振变换器主要参数设置如表3所示。 当系统处于负载突变和输入电压突变状态时传统PI控制、模糊PI控制和本文提出的变论域模糊神经PI控制效果分别如图9~10所示。将仿真结果图中信息整理,如表4所示。 表3 系统主要参数设置 由表4可见,系统在负载突变和输入电压突变的情况下,变论域模糊神经PI控制与传统PI控制、模糊PI控制相比,都具有更好的抗干扰性和更快的动态响应速度。 表4 不同控制策略的变换器控制性能对比 图9 不同控制策略负载突变响应曲线 图10 不同控制策略输入电压突变响应曲线 (1)本文所设计的控制器不依赖控制对象数学模型,具有控制灵活、适应性强的优点,还具有一定的智能水平,解决了传统PI控制器性能不佳、控制对象复杂多变等问题。 (2)采用变论域模糊神经PI控制对LLC谐振变换器进行闭环控制,其控制效果优于传统PI控制和模糊PI控制。在变论域模糊神经PI控制下,当负载和输入电压发生突变时,系统都具有更快的响应速度和更强的抗干扰能力。

2 LLC谐振变换器控制原理


3 变论域模糊神经PI控制器设计

3.1 模糊PI控制器设计
3.2 基于神经网络的模糊控制隶属度函数分布优化




3.3 基于变论域原理的模糊控制论域优化


4 仿真验证




5 结 论
猜你喜欢
电工技术学报(2022年20期)2022-10-29
电器与能效管理技术(2022年7期)2022-09-19
计算机仿真(2022年2期)2022-03-15
能源工程(2021年5期)2021-11-20
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
电子制作(2016年21期)2016-05-17
燕山大学学报(2015年4期)2015-12-25
