渐近搜索算法在软土基坑基底抗隆起上限分析中的应用
2020-12-02 01:54洪利仉文岗
土木与环境工程学报 2020年6期
洪利,仉文岗
(重庆大学 土木工程学院, 重庆 400045)
基坑坑底抗隆起稳定性验算是软土地区基坑设计的重要内容之一。目前,基坑抗隆起计算主要包括极限平衡方法[1-4]、强度折减有限元法[4-6]和上限分析法[7-8]。上限分析法源于Drucker[9]提出的极限分析理论,Chen等结合岩土材料的特性,将上限分析法应用于边坡的稳定性分析和地基承载力分析[10-15]。上限分析法主要有上限分析有限元[16]、多块体法[14]、连续速度场[8]等多种实现手段。其中,上限分析有限元法最为复杂,需要编制完整的有限元程序,目前,暂无成熟的上限分析有限元软件,因此,多以后两种计算方法为主。连续速度场需预先假设破坏面中的一些参数,因此,计算结果的准确性很大程度上依赖于假设参数的合理性。多块体法不需预先假设破坏面,可以很好地与渐近搜索算法结合。
渐近搜索算法是先利用Monte Carlo思想随机生成初始破坏面,然后利用“单个结点搜索+整体搜索”的方法,通过多轮搜索,使初始破坏面逐渐逼近临界破坏面,目前已成功运用于边坡稳定与地基承载力上限分析的破坏面搜索中[11,14]。笔者主要描述基坑抗隆起上限分析中的破坏面搜索技术,并给出破坏面搜索的优化问题表达;对搜索程序中的关键参数调试进行说明,最后通过实例计算与对比分析检验渐近搜索算法的应用效果。
1 多块体上限法计算基坑抗隆起稳定性
1.1 上限分析基本原理
极限分析上限定理有多种表示方法,此处采用能量方程表达式,即对于任何运动许可的破坏机构,内能耗散率不小于外力功功率,如式(1)。
(1)

应用上限方法求解的一般过程:运动许可破坏机构的建立,相容速度场的计算,上限分析功率方程求解,安全系数计算。
1.2 运动许可机构建立及相容速度场计算
参考极限平衡法与强度折减有限元法所分析得到的基坑隆起破坏面,以及Goh[3]、Faheem等[6]、秦会来等[7]所做研究,假设内支撑与支护墙体构成的支护系统具备足够的刚度(即暂不考虑支护系统刚度的影响),因此,墙后土体的破坏面轨迹竖直向下,其余部分则采用“近似圆弧滑动法”,如图1所示。

图1 上限分析运动许可机构Fig.1 Kinematically admissible failure mechanism of upper bound analysis
如图1所示,许可机构以圆弧滑动面为主要参考对象,破坏面由n+1个结点构成,共有多边形块体n个(其中2个四边形块体,其余为三角形块体)。为保证计算的准确性,运动许可机构的圆弧部分应用足够数量的三角形块体。图1中:B为基坑宽度;H为开挖深度;D为支护结构嵌入深度;li为各块体的破坏面长度;ki为各块体之间接触面长度;相容速度场由vi、vi,i+1构成,vi为各块体破坏面处的速度矢量,vi,i+1为相邻块体之间接触处的速度矢量;θi为vi+1正方向与竖直向下方向的夹角。相容速度场满足矢量运算法则
vi+1=vi+vi,i+1
(2)
由式(2)可知,式中的3个速度矢量恰好构成矢量三角形,由于功率方程计算中只用到速矢量的相对大小,可令v1=1,由算法给出初始破坏面后,所有速度矢量方向均为已知,此时,依据矢量三角形计算法则即可依次求出所有速度矢量的大小。速度矢量的详细计算及推导,可参考秦会来等[15]、邹广电[17]的相关文献。
1.3 功率方程的建立
由式(1)知,功率方程包含方程左端的外力功率和右端内能耗散项。外力功率项主要包括地面超载和土体自重两两部分。内能耗散项主要包括块体破坏面处内能消耗、块体之间接触面处内能消耗、支护结构与土体接触面内能消耗3部分。如式(3)所示。

fv1l1
(3)
式中:f=αSu,α为墙与土体之间的摩擦系数,依据Goh等[18]的建议,可取0.5~1之间,砂性土取0,黏性土取1。
1.4 安全系数的计算
参考强度折减法的原理,在式(3)的基础上也可引入安全系数,定量评估基坑的抗隆起稳定性。定义安全系数为
(4)
由式(4)可得安全系数为总耗散功率与总外力功率的比值。式(4)中的安全系数与强度折减法的安全系数有相同的含义,均表示抗剪强度安全储备。式(4)中,不排水抗剪强度越大,安全系数值越大,表示安全系数储备越充分。相似地,式(4)中的安全系数也可以划分为3个阶段:Fs大于1、等于1、小于1;分别对应土体稳定、极限平衡、土体失稳破坏3种情况。
2 渐近搜索算法的实现
2.1 破坏面搜索过程的优化问题表述
由以上的计算过程可知,不同的破坏机构,具有不同的速度场,安全系数也不同。所以,破坏面的搜索过程实质上可以归结为求安全系数最小值的问题,其中,破坏面的形状、相容速度场大小及方向等均为约束条件。优化表达见式(5)。
(5)
目标函数为FS(xi,yi),通过不断更新各节点坐标,使FS取得最小值。约束条件有两个:1)块体节点坐标自右向左为单调不增数列(x1=x2为墙后土体破坏面竖直向下段,-B≤xn为保证破坏面不穿越支护结构截面的几何条件);2)保证θi为单调递增数列,在搜索过程中维持破坏面“上凹”。Goh等[18]、陈祖煜[19]、张鲁渝等[20]指出,在边坡破坏面的搜索中,破坏面的上凹会自动实现,无须将保持破坏面上凹作为约束条件;Greco[11]、秦会来等[14]则建议在边坡搜索过程加入保持破坏面“上凹”为约束条件。考虑到基坑的破坏面较边坡复杂,笔者在编制计算程序时对两种方法均进行了测试,根据最后的计算结果,加入“上凹”约束条件具有更高的计算效率,建议在搜索程序中加入此约束条件。
2.2 初始破坏面的确定
初始破坏面既可以人为指定,也可以随机生成, Greco[11]、秦会来等[14]、陈祖煜[19]均采用4结点随机生成的初始破坏面;考虑到基坑破坏面较复杂,本文采用7结点随机初始破坏面。参考软土基坑抗隆起稳定性分析方面已有的研究成果,控制初始破坏面在水平方向上边界为0.5B~1B。由式(6)~式(19)可计算出初始破坏面各处结点的坐标值。
x1=x2=-x6=(0.5+0.5R1)·B
(6)
y1=0,y2=y6=H+D
(7)
x3=0.5x1
(8)
(9)
y3=y2+(x2-x3)·tan(η1)
(10)
x4=0
(11)
y4=H+D+x1
(12)
x6=-x1
(13)
x5=-0.5x6
(14)
(15)
y5=y6-(x6-x5)·tan(η2)
(16)
y7=H
(17)
(18)
x7=x6+(y7-y6)·cot(η3)
(19)
式中:R1、R2、R3为[0,1]之间的随机数。在编制计算程序时,应注意x7为破坏面最左侧结点,需满足式(5)中-B≤xn的约束条件。
2.3 破坏面的搜索
破坏面的搜索分为结点搜索和整体搜索两个阶段。结点搜索阶段主要确定破坏面的形状和大小,而整体搜索阶段主要确定破坏面的大小。
2.3.1 结点搜索阶段 结点搜索主要是针对每个结点逐个搜索;如图2所示,每个结点给定8个方向(地表和开挖面的结点只允许水平方向移动),依次进行搜索,只要有一个方向搜索成功,即更新该结点的坐标,并进入下一个结点的搜索;若所有方向搜索均失败,则该结点的坐标保持原值,并将该结点的搜索步长减半。“搜索成功”是指该结点沿某方向移动后破坏面的安全系数减小。结点搜索的公式为
(20)
式中:λi为各结点的搜索步长,根据算例的计算结果,建议初始步长取B/1 000;Nx、Ny分别有-1、0、1共3种取值,通过组合,实现对8个方向的搜索。
2.3.2 整体搜索阶段 考虑到结点搜索的先后顺序会对最终的搜索结果造成影响,在结点搜索的基础上,增加整体搜索阶段。具体做法是,在依次完成8个节点的搜索后,加入一轮整体搜索,即破坏面整体“外扩”或“内缩”;坐标更新公式为
(21)
式中:i为结点序号;k为搜索的次数(依次搜索完各结点计为一次)。
坐标更新后,安全系数减小,则保留更新后的结点坐标;否则,将保留原坐标值。重复进行结点搜索与整体搜索,满足收敛准则后,可认为搜索完成。
搜索算法流程图如图3所示。图3所示为7结点破坏面搜索流程,在实际求解过程中,往往7个结点不够,必须具备一定数量的结点,才能够捕捉到破坏面的几何特征。因此,学者们提出了多种扩充结点的方法,笔者采用张鲁渝等[20-22]建议的办法,即初始破坏面采用较少的结点,先进行数次搜索,破坏面初步稳定后;在每段滑面的中点处内插结点进行第2轮、第3轮的计算,直至安全系数及破坏面达到收敛条件。每一轮的计算流程与图3所示7结点计算流程相同。

图3 搜索算法流程图Fig.3 Flow diagram of search method
另一方面,搜索算法还可能会陷入局部最优解的情况,从而搜索不到全局最优解[14,19]。为避免此问题,可设置多组初始破坏面,再从中选取安全系数最小的一组为最终结果。以3.1节中的算例为例,按式(6)~式(19)计算生成50组初始滑面,如图4所示。
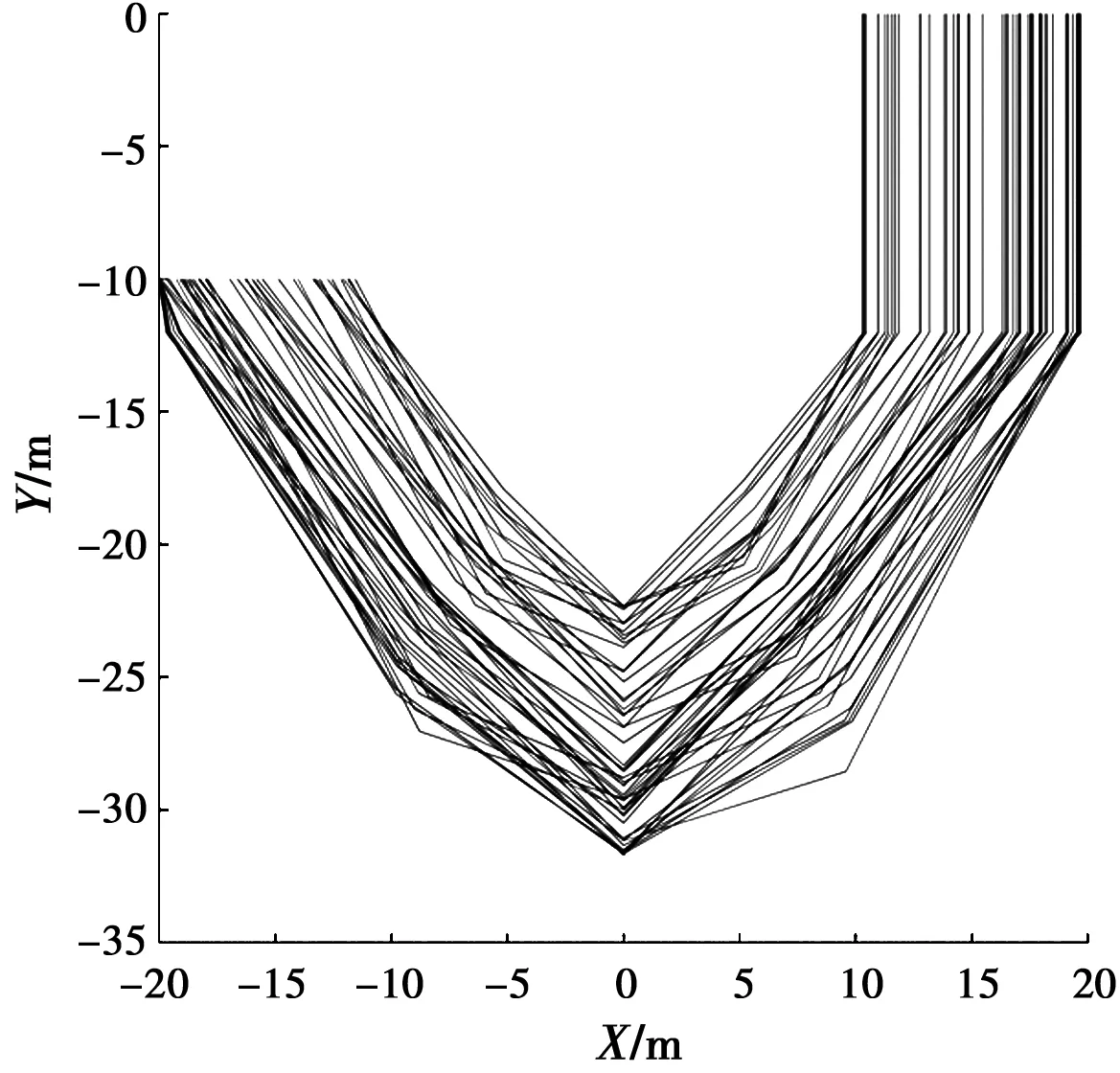
图4 50条随机产生的初始破坏面Fig.4 50 initial four-point failure surfaces generated by Monte Carlo method
2.4 收敛准则
由图3可知,收敛准则由安全系数差值和搜索步长两个指标构成,且它们均与破坏面结点个数有关,指标阈值由式(22)、式(23)计算。
(22)
λi
(23)

3 搜索算法应用效果检验
3.1 计算方案及计算参数设置
为检验搜索算法的应用效果,采用9个算例来检测。设置一个标准算例检验算法的可用性,同时,在此基础上设置两组对比算例,观察开挖宽度(4个)和支护结构嵌入深度(4个)对计算结果的影响,将程序计算结果与目前公认的一些结论相比较,初步检验算法的准确性。计算参数见表1。

表1 算例分析参数设置Table 1 Parameters of case study
如表1所示,标准算例中,开挖宽度取20 m,支护结构嵌入深度取10 m,其余均取表中值。对比算例中,控制单一参数变化,其余参数均取标准算例中的参数值。
3.2 算例计算结果分析
算例采用4轮搜索,每轮的结点个数分别为7、11、19、35;根据式(22),4轮的搜索步长阈值设置为10-4、5×10-5、10-5、10-6;4轮的搜索次数分别预设为150、150、100、80。各阶段的搜索结果及破坏面形状见图5和图6。
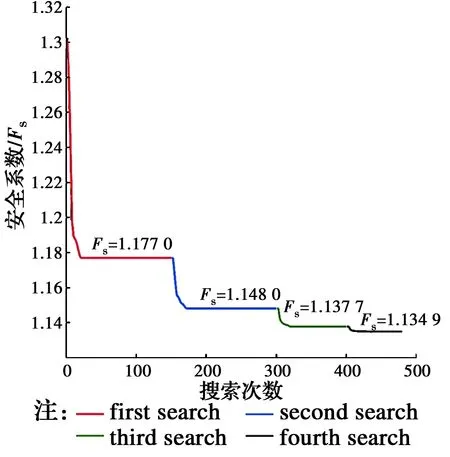
图5 安全系数收敛过程Fig.5 Convergence process of safety factor

图6 破坏面优化过程Fig.6 Optimizing process of the failure surface
由图5和图6可知,随着破坏面结点个数的增加,破坏面的形状和安全系数趋于稳定。其中,第3阶段和第4阶段安全系数差值仅为0.003 2,相对误差小于1%,表明搜索算法应用效果较好;且各阶段的收敛速度均很快,可适当减小每阶段的搜索次数。依据图6,建议前3个阶段搜索次数控制在60~80次,第4阶段搜索次数控制在40~60次。由图7也可以观察到,第3阶段和第4阶段的破坏面位置基本一致,因此,搜索算法应控制在3~4轮即可(即破坏面结点个数20~40),不宜过多或者过少。
除标准算例外,设置了两组对比算例,观察支护结构嵌入深度和基坑宽度对安全系数及破坏面的影响,计算结果如图7、图8所示。
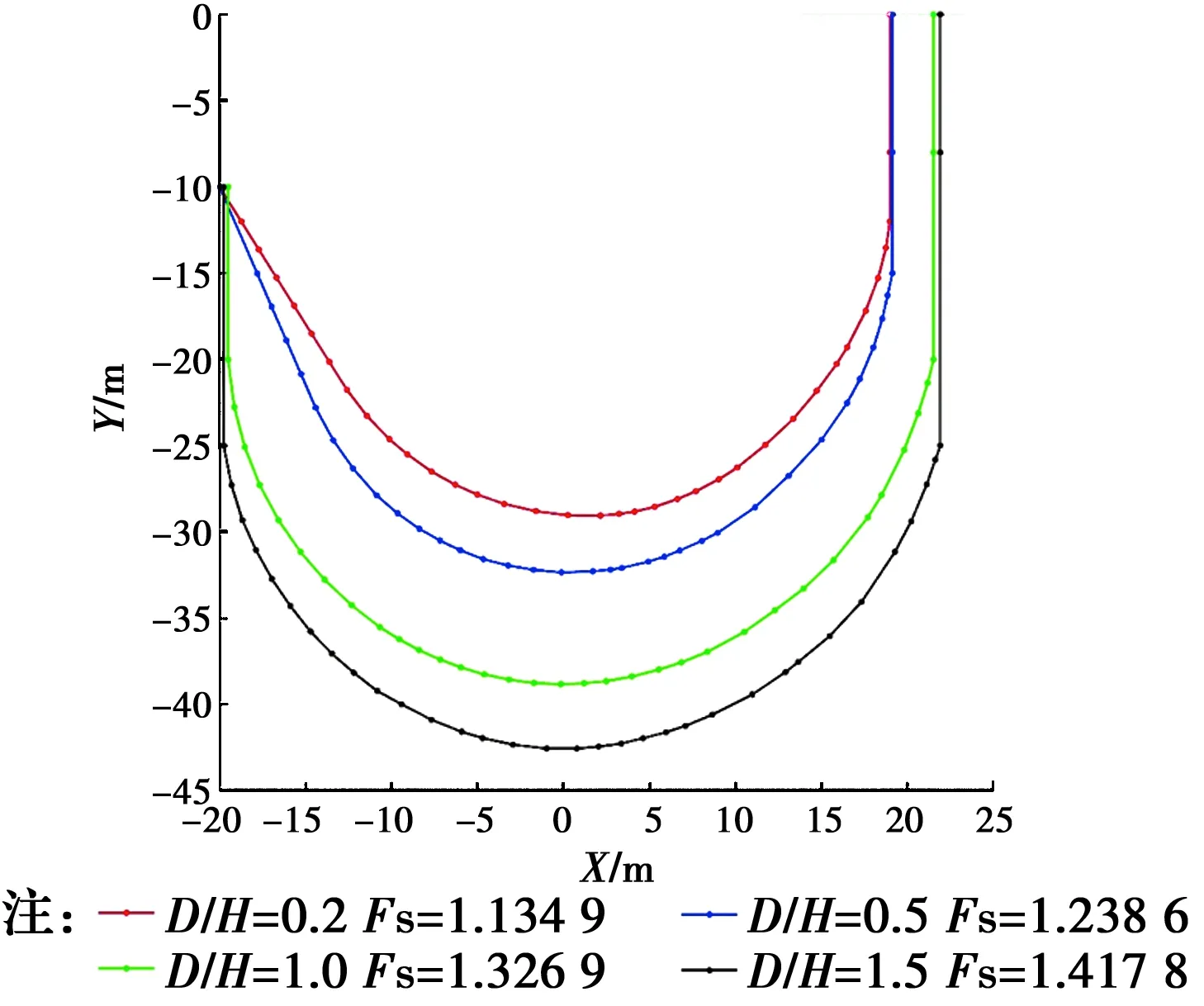
图7 不同支护结构嵌入深度时基坑抗隆起失稳面Fig.7 Failure surfaces of basal heave with different depths of supporting structures

图8 不同开挖宽度时基坑抗隆起失稳面Fig.8 Failure surfaces of basal heave with different excavation widths
由图8可见,随着支护结构嵌入深度的增加,基坑失稳面逐渐扩大,安全系数逐渐提高,符合常规的有限元软件计算结果及工程经验[23-24]。嵌入深度较小时,坑底隆起破坏面可能延伸至整个基坑宽度;嵌入深度较大时,隆起破坏面向支护墙侧靠近,这是因为假设支护墙体为刚性,因此,增加嵌入深度对阻断隆起破坏面的延伸效果显著。
由图9可见,开挖宽度对基坑抗隆起失稳面影响较大,随着开挖宽度的增加,抗隆起失稳面不断扩大,且失稳面的半径约为开挖宽度的0.9倍,这一结果更倾向于Prandtl失效模式;同时,安全系数也随着开完宽度的增加而减小,这也同样符合常规的有限元计算结果和工程经验[6]。
综合上述的算例分析可以看出,搜索算法在基坑抗隆起分析中具有良好的应用效果。
4 实际工程案例分析
选用唐震等[8]、Chang[25]的案例进行分析。Chang应用上限分析方法重新分析了基坑的抗隆起稳定性,并推导出简易公式用于计算基坑抗隆起安全系数。唐震等采用连续机构场进行上限分析。
计算所需参数以及计算结果见表2(各符号的意义同表1)。
由表2可知,Chang提出的简易计算公式虽然计算简单,但得出的安全系数误差较大,普遍偏小,而且接近临界状态时可能出现误判。唐震等采用的连续机构场法计算结果偏保守,对于重要建筑物的稳定性分析较为适用;而多块体法的计算结果则在两者之间,兼具经济性和安全性的要求。

表2 各案例安全系数计算结果对比Table 2 Comparisons of safety factors among different methods in different cases
5 结论
将渐近搜索算法与多块体上限法相结合,实现了基坑抗隆起上限分析。针对多块体上限法的理论要求,给出了初始破坏面的生成公式、几何约束条件与收敛条件;结合算例分析,就破坏面结点个数、搜索步长、搜索次数等参数进行讨论,并给出建议值。为避免出现局部最优解,采用设置多组初始破坏面的方法。通过实例分析以及与其他上限分析方法的对比可知,渐近搜索算法应用效果良好,为解决基坑抗隆起分析中破坏面的确定提供了一种新的计算方法。
笔者在运用算法进行分析时,并未考虑支护结构刚度、基岩埋置深度等因素,因此,如何在上限分析(或安全系数)的计算中考虑这些因素,将是下一步研究的重点。
猜你喜欢
现代电力(2022年2期)2022-05-23
海洋工程(2022年2期)2022-04-02
中国金属通报(2021年17期)2021-12-23
军民两用技术与产品(2021年2期)2021-04-13
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
水运工程(2020年11期)2020-11-27
安全与环境工程(2018年5期)2018-10-10
智能计算机与应用(2018年3期)2018-09-05
电子技术与软件工程(2018年10期)2018-07-16
速读·中旬(2018年4期)2018-04-28