
基于Tikhonov 正则化参数矩阵的激光吸收光谱燃烧场二维重建光路设计方法*
2020-12-05 07:34李宁TuXin黄孝龙翁春生
物理学报 2020年22期
李宁 Tu Xin 黄孝龙 翁春生
1) (南京理工大学瞬态物理国家重点实验室, 南京 210094)
2) (Department of Electrical Engineering and Electronics, University of Liverpool, Liverpool L69 3GJ, UK)
有限投影条件下激光吸收光谱二维测量光路优化对燃烧场重建结果具有重要影响. 针对基于Tikhonov正则化的病态投影方程组求解问题, 提出了基于正则化参数矩阵的光路设计与二维重建方法. 建立了基于Tikhonov 正则化参数矩阵的光路设计目标函数, 利用遗传算法获得最佳光路布置方式, 通过匹配光路与正则化参数分布对测量区域内正则化权重进行调整以减小重建误差. 采用7185.6 cm—1 波段H2O 特征谱线并结合20 条投影光路对10 × 10 离散化测量区域内双峰高斯分布模型进行了重建, 对5 种光路布置方式重建结果进行了对比分析, 结果表明基于Tikhonov 正则化参数矩阵的光路布置方式重建结果最佳. 光路数量越少, Tikhonov正则化参数矩阵作用效果越明显. 开展了针对气液两相脉冲爆轰发动机外流场的模拟测量研究, 验证了本文光路布置方式在复杂多变流场环境下重建效果. 在实验室内针对小型燃气炉进行了实验测试, 重建燃烧场峰值位置和幅值与实际情况吻合. 研究结果对于推动激光吸收光谱二维重建技术在发动机诊断及燃烧效率提升方面的应用具有重要意义.
1 引 言
可调谐半导体激光吸收光谱技术(TDLAS)通过扫描气体特征吸收谱线实现对气体组分及温度的实时监测, 具有测量灵敏度高、时间分辨率高、不受背景气体干扰等突出优点, 是发动机性能测试的有效手段[1-5]. 由于测量原理及硬件设备限制,可调谐半导体激光吸收光谱技术难以直接进行二维重建, 需通过设计多光路测量系统并与断层图像重建技术相结合, 实现对组分浓度或温度二维分布测量, 从而在发动机燃烧诊断优化、等离子体射流研究、大气污染物监控等方面发挥更大的作用[6-10].
受测量空间的限制, 可调谐半导体激光吸收光谱测量系统可布置的测量光路有限, 光路数量远小于网格数量, 测量区域内存在大量无光路通过的离散网格, 属于典型的病态方程组求解问题. 常见的求解算法包括迭代求解法[11,12], 如代数迭代算法(ART)、最小平方QR 分解法(LSQR)等, 或采用如模拟退火算法(SA)、遗传算法(GA)等全局性搜索算法[13,14], 但这些算法并不能对无光路通过区域进行求解, 在光路数量较少时重建误差较大. 一种可行的解决方法是对病态方程组采用正则化策略, 如Tikhonov 正则化等, 即通过增加约束方程组控制解的平滑性, 使得方程组的解连续且唯一.此时不但可以利用上述求解算法获得较好的燃烧场重建结果, 还可以通过奇异值分解(SVD)等方法对方程组进行数学分析.
实现在有限投影数量条件下的光路布置设计和优化是提升激光吸收光谱二维重建能力的重要环节, 部分学者对此进行了深入研究. Terzija 等[15]率先提出基于投影域坐标位置优化的光路设计方法, 即将测量区域内光路位置转化为投影域坐标点, 通过增加各个坐标点之间相互距离以最大程度覆盖测量区域, 进一步提升重建效果. 尽管开展了实验研究, 但并没有给出相关理论分析. Song 等[16]以测量网格内光路数量作为权重系数(GWF)并建立目标函数, 通过优化光路布置使得GWF 达到最大值. 文中采用仿真对4 种光路布置方式进行对比, 但同样没有对该方法进行理论分析. Twynstra等[17]采用Tikhonov 正则化方法求解激光吸收光谱二维重建问题, 通过理论推导给出了基于单一正则化参数的光路设计目标函数. 考虑到采用的正则化矩阵并非传统0 阶或1 阶微分算子, 研究中没有采用传统Morozov 偏差原理或L曲线准则确定正则化参数, 而是根据奇异值分布情况给出正则化参数选取范围, 通过模拟仿真验证了优化后光路布置方式的重建效果. Grauer 等[18]提出了基于Bayesian原理的光路设计思想, 在采用Tikhonov正则化和单一正则化参数的基础上提出了基于后验协方差矩阵的光路优化目标函数(MAP), 理论推导了函数表达式并采用两组模型对该方法设计光路进行了验证, 仿真结果表明该函数可以作为衡量重建误差的指标, 实现对于有限数量条件下的光路设计.Yu 等[19]针对代数迭代算法重建的特点, 提出了以最小化矩阵向量正交度(MOD)为目标函数的光路设计方法. 其主要思想是进一步减小投影光路之间的线性相关性, 使得光路布置可以携带尽可能多的测量区域信息数据. 该方法以最小化矩阵向量正交度为目标, 优化过程中并未考虑任何先验信息,因此并不适用于采用平滑策略的正则化方法.
较少的测量光路很难均匀分布于测量网格区域内, 因此利用Tikhonov 正则化方法处理病态方程组时单一正则化参数难以满足不同测量区域内对于正则化权重调整的需求. 本文提出了一种基于Tikhonov 正则化参数矩阵的TDLAS 燃烧场二维重建光路设计方法, 利用矩阵内非均匀分布的正则化参数实现对不同测量区域内正则化权重的调整. 理论推导了基于Tikhonov 正则化参数矩阵的光路设计目标函数, 采用遗传算法获取了优化光路布置方式. 利用模型仿真将本文方法与其他方法进行了对比, 验证了基于Tikhonov 正则化参数矩阵光路布置方式的重建效果. 该方法可为TDLAS 技术应用于少投影条件下的燃烧场二维重建光路设计与Tikhonov 正则化求解提供指导, 具有重要理论研究意义和工程应用前景.
2 TDLAS 二维重建光路设计方法
2.1 基于Tikhonov 正则化的TDLAS 二维重建理论分析
一束波长为v的激光束透射过待测介质时, 激光强度受气体特征吸收谱线影响, 强度变化可根据Beer 定律进行描述:

其中,It为穿越待测气体介质后透射激光强度;I0为无气体吸收时初始激光强度;P为气体介质压力;L为激光在气体介质中传播光程;X为体积浓度;φ(ν)为特征谱线线型函数, 在整个频域范围内积分值为1;S(T) 为特征谱线线强函数;b(ν) 定义为测量得到的光谱吸收系数. 图1 所示为激光吸收光谱二维测量光路系统示意图.
图1 激光吸收光谱二维测量光路系统示意图Fig. 1. Geometry of transmitted laser beam in tomography measurement.
为实现燃烧场二维诊断, 需从不同角度和位置布置投影光路, 获得足够的投影信息以实现对燃烧场组分温度分布的重建. 将测试区域离散化为n个图像网格, 假定每个网格内气体组分温度分布均匀, 最终测量得到的光谱吸收系数积分值由穿越离散化区域各个网格内气体吸收贡献值叠加而成,(1)式可表示为
其中,Aij为第i条光路穿越第j个网格时的光路长 度;xj为第j个网格内气体吸收系数;bi为 第i条光路测量得到的投影值, 即该光路穿越测试区域得到的光谱吸收系数累积值. 因此, 对于光路数量为m的光学测试系统, 燃烧场二维重建的核心是求解如下投影方程组:

其中,A为m×n系数矩阵,x为n×1 未知数向量,b为m×1 投影向量. 对于激光吸收光谱二维重建测量而言, 由于受到测量空间、设备成本等实际条件限制, 光路数量m远小于网格数量n, 投影数量有限, 因此激光吸收光谱二维重建研究属于典型的病态方程组求解问题. 增加正则化条件是求解病态方程组的有效方法, 典型方法如Tikhonov 正则化,增加约束条件保证(3)式存在唯一解. 此时方程组求解转化为求最小值问题:

其中:λ为正则化参数;L为n×n正则化矩阵, 是微分算子的离散形式. 传统Tikhonov 正则化中正则化矩阵L一般为0 阶微分算子(单位阵)或1 阶微分算子. 考虑到实际流场中存在连续性条件, 这里正则化矩阵L采用以下算子形式:

其中,k为与第i个网格相邻的网格数. 此时, 最小化问题等价于求解如下正则化线性方程组:

由于ATA半正定, 因此只要正则化参数λ非零, (6)式的解可表示为

分析正则化解xλ与精确解xexact之间的误差δx, 通过进一步推导可以得到:

其中I为单位矩阵. 可以看出, 直接影响δx的因素包括系数矩阵A与正则化参数λ, 通过合理的光路设计与参数选择, 可以有效减小误差δx. 定义F为光路设计目标函数, 用于对激光吸收光谱二维重建光路进行优化:

2.2 基于Tikhonov 正则化参数矩阵的光路设计方法
Twynstra 提出的光路设计方法是首先确定正则化参数λ[15], 进而通过计算(9)式获取优化后的光路布置方式使δx达到最小. 正则化参数λ的选取对重建效果具有重要影响. 由于采用的正则化矩阵L并非单位阵, 因此这里不能采用传统的L曲线等正则化参数确定方法. 一种可行的方法是利用奇异值分解方法对增广矩阵 [A;λL] 进行分析:

其中:U和V分别为左 右奇异值向量ui和vi组成的矩阵;Σ为奇异值σi组成的对角阵,Σ中前m个奇异值为原系数矩阵A的奇异值, 正则化参数λ的引入不能对原系数矩阵A的m个奇异值产生明显影响. 图2 为针对10 × 10 离散化网格和光路数量为20 的光学测试系统, 不同正则化参数λ作用下增广矩阵 [A;λL] 奇异值分布结果.
根据图2 中λ对系数矩阵A奇异值的影响,λ取值应介于0.1 至1 之间. 当正则化参数λ取值大于1 时, 引入λ可以使正则化解xλ范数减小, 但以牺牲残差‖Ax −b‖为代价, 导致过度平滑从而使重建结果失真, 重建误差明显增大; 当λ小于1 时,引入λ不会对原系数矩阵A奇异值产生影响, 残差‖Ax −b‖较小. 但λ过小将导致增广矩阵 [A;λL] 中其他奇异值迅速减小. 小奇异值对应的奇异向量对噪音敏感, 从而使得正则化作用减弱, 同样会影响重建结果. 在本文后续对不同光路重建效果对比中, 正则化参数λ取值为0.5.

图2 不同正则化参数 λ 影响下增广矩阵 [ A;λL] 奇异值变化曲线Fig. 2. Singular values of the augmented matrix[A;λL]with various λ.
由于光路数量m远小于网格数量n, 因此光路在测量网格区域内的分布难以均匀. 采用单一正则化参数λ意味着在整个测量区域内正则化权重均保持一致, 与实际情况不符. 本文提出了采用n×n正则化参数矩阵λ的概念, 正则化参数矩阵λ为对角阵, 其定义为

其中, 对角阵对角元素满足λ1≥λ2≥λ3≥···≥λn≥0 . 采用正则化参数矩阵λ后, 通过调节正则化参数矩阵中元素值, 使得正则化参数矩阵λ与光路布置方式所对应的系数矩阵A更加匹配, 从而进一步提升二维重建效果. 此时对应的光路设计目标函数表示为

为设计合理的光路布置方式, 需对光路设计目标函数(12)式进行求解. (12)式包含系数矩阵A中2m个光路位置未知量, 以及正则化参数矩阵λ中n个矩阵元素未知量, 属于典型的非线性方程组求解问题. 传统的非线性方程组求解方法, 如Levenberg-Marquardt 方法等, 求解速度快, 但是对于多极值函数而言极易陷入局部最优之中, 本文中采用遗传算法对此进行计算. 遗传算法是模拟自然进化中“适者生存”的原理来进行自学习和寻优的, 不受搜索空间的限制性假设约束, 具有内在并行性、收敛速度快的优点. 图3 为采用遗传算法对10 × 10 离散化网格和光路数量为20 的光路设计目标函数求解过程, 遗传算法在运行200 代以后逐渐趋于稳定, 获得优化后的光路布置方式与正则化参数分布图像.

图3 光路布置目标函数遗传算法求解过程Fig. 3. Evolution of objective function by genetic algorithm.
本文中采用Tikhonov 正则化方法直接进行重建计算, 获得光谱吸收系数分布图像, 根据不同谱线的吸收系数分布结果可以进一步计算燃烧场温度与浓度分布. 本文侧重于有限投影下光路设计方法研究及相应光路布置方式下的重建效果评估, 因此仅对吸收系数分布进行了分析. 为衡量重建图像质量, 定义重建误差为
3 TDLAS 二维重建仿真
3.1 正则化参数矩阵作用及影响因素分析
正则化方法的实质是将求解投影方程(3)式转化为实现投影方程与正则化方程之间的相对平衡, 而正则化参数矩阵λ控制着残差‖Ax −b‖与‖λLx‖之 间的权重. 为直观说明正则化参数矩阵λ的作用, 以常见扇形光路布置方式为例进行说明.扇形光路布置采用4 个投影角度, 每个投影角度均匀布置5 条光路, 根据扇形光路布置方式获得系数矩阵A, 通过利用(12)式对该扇形光路布置方式对应的正则化参数矩阵λ进行计算, 如图4 所示.
可以明显看出, 优化后的正则化参数矩阵λ与所选择的光路布置方式A紧密相关. 在光路分布较为稀疏的区域, 正则化参数矩阵取值较高, 对应正则化权重较大, 意味着该区域内残差主要由‖λLx‖控制. 正则化参数矩阵通过控制测量区域内不同位置处的正则化权重, 实现对重建效果的进一步提升.
根据(10)式可知, 系数矩阵A的特征直接影响了正则化参数矩阵λ取值范围. 增加测量区域网格尺寸将导致系数矩阵A奇异值增大, 进而需要增大相应正则化参数矩阵元素值, 以增加残差‖λLx‖在方程中的权重, 达到平滑效果. 对于1 m × 1 m的测量区域, 正则化参数矩阵λ取值范围在1 至10 之间; 对于0.1 m × 0.1 m 测量区域, 正则化参数矩阵λ取值范围在0.1 至1 之间. 在测量区域尺寸确定的条件下, 加密网格对系数矩阵A的奇异值影响较小, 因此并不改变正则化参数矩阵λ取值范围.
图4 光路布置方式与相应的正则化参数矩阵 (a) 扇形光路布置; (b) 正则化参数矩阵元素分布图像Fig. 4. Beam configuration and corresponding regularization parameter matrix: (a) Fanned beam configuration; (b)distribution of matrix elements in the physical space.
光路数量变化会导致系数矩阵A的奇异值数量发生变化, 但并不会明显改变奇异值大小, 因此光路数量变化并不会直接影响正则化参数矩阵λ取值范围. 但值得注意的是, 正则化参数矩阵λ的作用效果与光路数量相关. 当光路数量较少时, 意味着有更多网格依赖于正则化方法进行求解, 正则化参数矩阵λ控制残差‖λLx‖的作用更加明显, 此时采用正则化参数矩阵λ可以更加有效降低误差,正则化参数矩阵λ的优势更为突出. 以20 × 20 离散网格为例, 采用4 个投影角度的扇形光路布置方式, 每个投影角度下的光路数量分别设定为4 个、6 个和8 个, 对测量区域内100 个幅值和位置随机的高斯分布模型进行重建, 研究不同光路数量下正则化参数矩阵λ对重建精度的影响.
图5 为4 × 4 扇形光路布置方式下利用单一正则化参数和正则化参数矩阵λ两种方法对不同高斯分布模型重建误差对比. 采用正则化参数矩阵λ方法可使100 个高斯分布模型重建结果平均重建误差ε减小0.018; 在4 × 6 和4 × 8 两种光路布置方式下平均重建误差ε分别减小0.008 和0.003.可见, 随着光路数量的增加两种方法重建效果趋于一致, 基于正则化参数矩阵λ的重建方法在光路数量较少条件下优势更加明显.
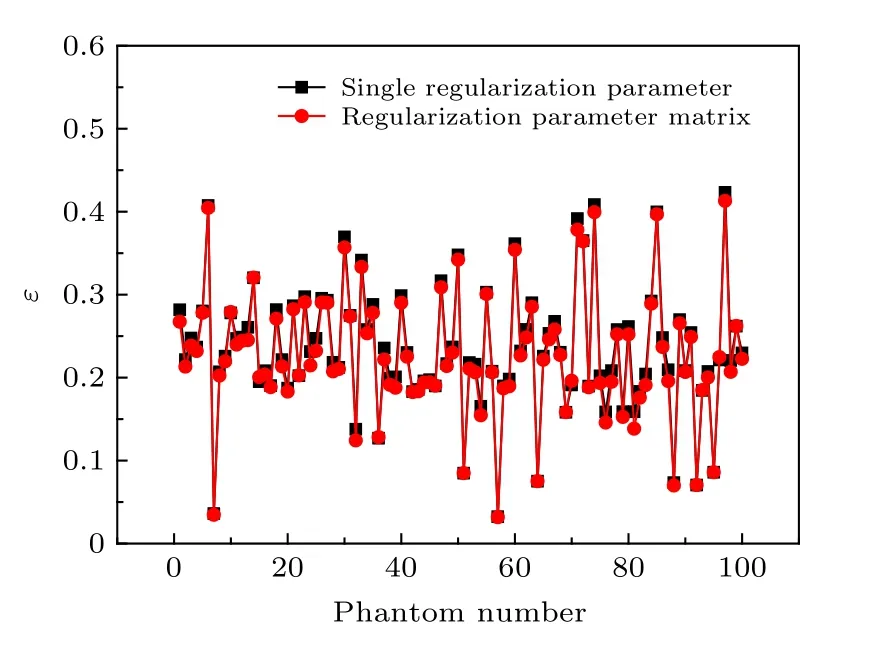
图5 4 × 4 扇形光路布置方式下分别利用单一正则化参数与正则化参数矩阵方法对100 个高斯分布模型重建结果对比Fig. 5. Comparison of reconstruction errors for 4 × 4 fanned beam arrangement and 100 Gauss phantoms calculated by single regularization parameter and regularization parameter matrix.
3.2 基于正则化参数矩阵的光路设计与重建效果对比
利用Tikhonov 正则化参数矩阵λ, 根据目标函数(12)式并结合遗传算法获得优化后的激光吸收光谱二维测量光路布置方式. 为验证该光路布置方式重建效果, 分别与以下光路布置方式重建结果进行对比: 方式(a)2 投影角度平行光路布置方式;方式(b)4 投影角度扇形光路布置方式; 方式(c)基于Mod 设计的光路布置方式; 方式(d)基于单一正则化参数设计的光路布置方式; 方式(e)基于正则化参数矩阵设计的光路布置方式. 光路布置方式及对应投影域如图6 所示.

图6 5 种光路布置方式空间分布图与对应投影域图 (a) 2 × 10 平行光路布置方式; (b) 4 × 5 扇形光路布置方式; (c) 基于Mod 设计的光路布置方式; (d) 基于单一正则化参数设计的光路布置方式; (e) 基于正则化参数矩阵设计的光路布置方式Fig. 6. Five example beam configuration in the physical space and in Radon space: (a) 2 × 10 parallel beams arrangement; (b) 4 ×5 fanned beams arrangement; (c) beams arrangement designed based on MOD method; (d) beams arrangement designed based on single regularization parameter; (e) beams arrangement designed based on regularization parameter matrix.
在测量区域内建立二维分布模型. 测量对象为燃烧环境下H2O 组分, 测量谱线为近红外波段7185.6 cm—1处H2O 特征吸收谱线, 重建模型采用双峰高斯分布函数. 将测量区域离散化为10 ×10 网格, 将20 条光路以图6 所述方式进行布置.为了便于对比, 每种光路布置方式均配合Tikhonov正则化直接计算方法获得重建结果. 其中, 前4 种光路布置方式采用单一正则化参数, 正则化参数设定为0.5. 方式(e)为基于正则化参数矩阵设计的光路布置方式, 正则化参数矩阵中元素取值范围为0.1 至1. 重建模型与不同光路布置方式重建结果如图7 所示.
可以看出, 不同光路布置方式所对应的重建结果具有明显差异. 光路布置方式(a)和方式(b)对应的重建结果较差, 峰值位置和大小均与模型不同,重建误差分别为0.28 和0.26, 如图7(b)和图7(c)所示. 对于光路布置方式(a)而言, 尽管所有网格内均有光路通过, 但投影角度不足仍然导致了较大的重建误差, 表明在有限投影数量条件下该规则化光路布置方式并不合理. 基于Mod 设计方法的光路布置方式(c)同样没有达到很好的重建效果, 重建误差达到了0.25(图7(d)). 这主要是由于Mod 方法采用基于最小化矩阵向量正交度的原则进行光路优化, 其目标是减小光路之间的线性相关性, 在光路设计中并没有考虑正则化的影响.当重建算法中无Tikhonov 正则化或正则化作用相对较弱时, 该光路布置方式具有优势[19], 但此时很难获取无光路网格内的光谱信息, 影响重建质量.

图7 二维重建模型与不同光路布置方式重建结果 (a) 重建模型; (b) 2 × 10 平行光路布置方式; (c) 4 × 5 扇形光路布置方式;(d) 基于Mod 设计的光路布置方式; (e) 基于单一正则化参数设计的光路布置方式; (f) 基于正则化参数矩阵设计的光路布置方式Fig. 7. Phantom and reconstruction results from different beam arrangement: (a) Phantom; (b) 2 × 10 parallel beams arrangement;(c) 4 × 5 fanned beams arrangement; (d) beams arrangement designed based on MOD method; (e) beams arrangement designed based on single regularization parameter; (f) beams arrangement designed based on regularization parameter matrix.
基于单一正则化参数的光路布置方式(d)和基于正则化参数矩阵的光路布置方式(e)所对应的重建结果较好, 重建燃烧场峰值位置和幅值均与模型吻合, 两者的重建误差分别为0.20 与0.18, 如图7(e)和图7(f)所示. 相对而言, 基于正则化参数矩阵的光路布置方式重建效果更加理想. 该方法对测量区域内不同位置处Tikhonov 正则化权重进行自动调整: 一方面利用平滑约束条件计算出无光路通过区域的吸收光谱数据, 另一方面在光路通过区域内减小Tikhonov 正则化权重, 降低对于投影方程‖Ax −b‖计算的影响, 达到最佳的重建效果.
以四峰高斯分布函数为重建模型, 验证该光路布置方式对复杂燃烧场的重建能力. 仿真结果表明基于正则化参数矩阵的光路布置方式的燃烧场重建误差为0.24, 依然是上述几种光路布置方式中的最优结果. 同时可以看出, 针对更加复杂燃烧场工况, 较少的光路数量会导致重建误差增大. 增加光路数量可以提高重建燃烧场空间分辨率, 有利于进一步改善重建效果.
3.3 噪音对重建结果的影响
利用图6(e)中设计得到的光路布置方式, 针对重建模型获取光路投影向量b. 通过对投影向量b添加不同比例的噪音, 模拟实际测量过程中噪音对于重建精度的影响. 重建误差ε随噪音幅值的变化曲线如图8 所示.
可以看出, 尽管重建误差ε随着投影向量b中随机白噪音幅值的增加而增大, 但增长幅度较缓.在噪音幅值从0 提高到10 %过程中, 重建误差ε仅由0.178 增加至0.197. 分析其原因, 主要是由于重建过程中Tikhonov 正则化通过增加约束方程组控制解的平滑性. 当正则化参数矩阵选取范围适当时,‖λLx‖将 会明显抑制由投影向量b中噪音所引起的离散化网格间吸收系数的剧烈变化, 其功能相当于对重建结果进行滤波, 在一定程度上达到抑制噪音的效果, 减小了噪音对重建的影响.

图8 投影数据噪音对重建误差的影响Fig. 8. Effect of noise in projections on reconstruction error.
4 针对爆轰管外流场二维重建仿真分析
脉冲爆轰发动机(PDE)管外流场变化剧烈,是验证光路布置方式和重建方法有效性的理想模型, 因此本文中开展了针对PDE 管外流场二维分布重建的模拟测量研究. 采用数值计算方法获取爆轰过程外流场分布情况, 以此作为模型考察上述几种光路布置方式对该流场的重建效果.
根据气液两相PDE 物理模型(图9), 建立考虑黏性影响下的PDE 外流场轴对称控制方程, 采用时空守恒元/求解元(CE/SE)方法进行求解. 模型中PDE长为1.4 m, 口径为0.08 m, 以汽油和空气为燃料和氧化剂, 初始温度压力分别为296 K 和1 atm(1 atm=101325 Pa), 填充系数为1. 计算过程中忽略PDE 管壁与外界的热交换, 化学反应释放的能量仅被气体吸收. 通过仿真计算得到爆轰过程外流场温度组分分布, 以此作为后续激光吸收光谱二维重建模型. 详细的PDE 模型和计算方法见文献[20].
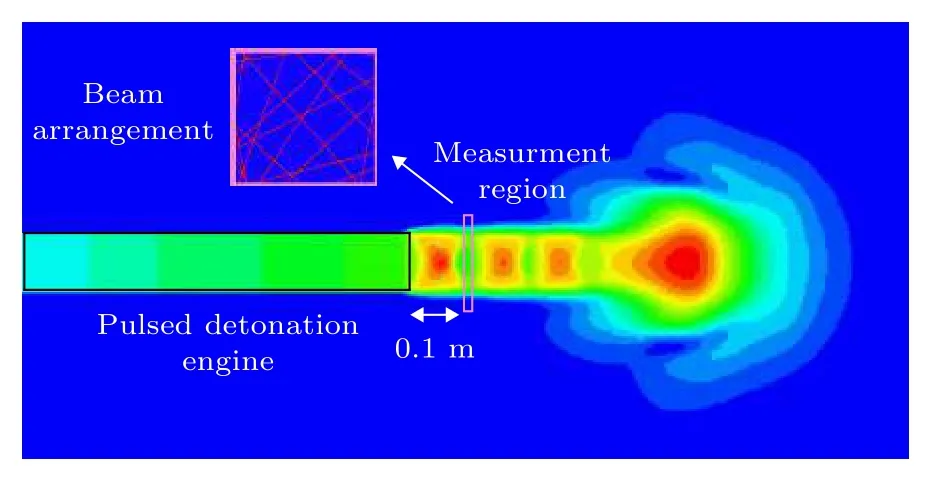
图9 气液两相爆轰外流场重建模型Fig. 9. Model of simulated tomography measurement in a two-phase detonation flow.
测量区域位于距离管口10 cm 处, 为20 cm ×20 cm 矩形区域. 将测量区域离散化, 采用20 条测量光路建立系数矩阵A, 采用7185.6 cm—1处H2O吸收谱线获取投影值并建立投影向量b. 利用图6中5 种不同光路布置方式分别对PDE 爆轰波溢出管口后20 ms 时间段内管外流场分布情况进行重建. 重建误差变化情况如图10 所示.
在PDE 爆轰波溢出管口后20 ms 时间段内,管外流场温度变化剧烈, 测量区域内最高温度由1480 K 迅速降低至570 K, 温度场影响范围由8 cm × 8 cm 增加至17 cm × 17 cm. 由图10 可以看出, 基于光路布置方式(d)和光路布置方式(e)的燃烧场重建效果较好, 重建误差ε远低于其他3 种光路布置方式, 结论与双峰高斯分布模型重建结果一致. 相对而言, 基于正则化参数矩阵的光路布置方式(e)所对应的重建效果优于光路布置方式(d), 平均重建误差降低0.012.
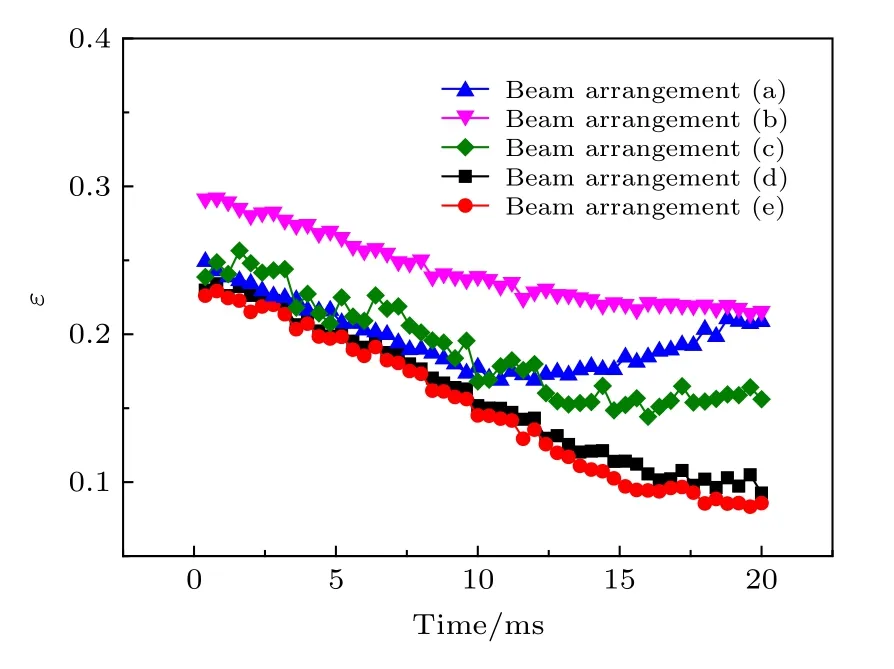
图10 基于图6 不同光路布置方式的气液两相爆轰外流场重建结果对比Fig. 10. Comparison of reconstruction errors for the external flow field of two-phase detonation based on beam arrangements in Fig.6.
5 燃烧场二维分布重建实验研究
以小型燃气炉平面火焰为研究对象, 在实验室内开展了燃烧场二维分布重建实验研究, 测试系统示意图如图11 所示. 测量采用Nel 公司DFB 可调谐半导体激光器, 中心波数为7185.6 cm—1, 通过利用信号发生器驱动半导体激光器以1 kHz 频率扫描H2O 特征吸收谱线. 激光束由光纤连接至测试区域, 经过分光器后分为20 条光路, 以图6(e)所示方式进行布置. 测量光路透射过25 cm × 25 cm矩形测试区域后, 测量得到的投影信号经过光电探测器接收, 由数据采集系统采集记录. 测量过程中波长变化由标准具进行监测.
燃气炉直径为7.6 cm, 测量截面位于燃气炉上方2 cm 处, 热电偶测量温度约为1210 K. 根据测量得到的20 条光路投影数据, 利用Tikhonov正则化方法分别对测量区域内单个和多个燃气炉燃烧场分布情况进行重建. 图12 为计算得到的单个和两个燃气炉分别布置于测量区域内的重建结果. 可以明显看出, 重建结果可以准确反应出燃烧场分布情况, 重建位置与燃气炉位置完全吻合. 对于双炉重建结果而言, 两个光谱吸收系数峰值较为接近, 与实际情况一致, 表明基于Tikhonov 正则化参数矩阵的光路设计与重建方法可用于有限投影条件下的燃烧场诊断.
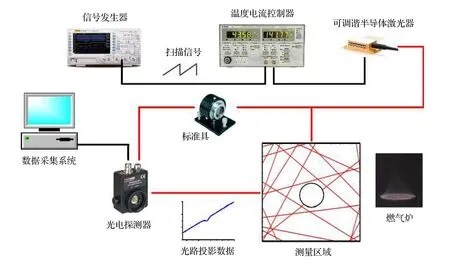
图11 激光吸收光谱二维重建实验示意图Fig. 11. Experiment on tomography reconstruction based on tunable diode laser absorption.

图12 燃气炉重建结果 (a) 单炉实验结果; (b) 双炉实验结果Fig. 12. Reconstruction results of gas burners: (a) single burner; (b) double burners.
6 结 论
光路布置方式优化是提升有限投影条件下激光吸收光谱二维重建能力的关键. 本文针对病态投影方程组Tikhonov 正则化处理方法, 提出了基于正则化参数矩阵的光路设计方法, 通过数学推导建立了光路设计目标函数, 采用遗传算法获得了优化后光路布置方式. 通过仿真研究了正则化参数矩阵的作用效果, 结果表明正则化参数矩阵可以通过控制测量区域内不同位置处正则化权重提高重建精度, 该方法在光路数量较少条件下优势更加明显.利用基于Tikhonov 正则化参数矩阵的光路布置方式与其他光路布置方式分别对双峰高斯模型进行了重建对比, 结果表明本文设计的光路布置方式可以达到更好的重建效果, 且Tikhonov 正则化参数矩阵对于测量噪音具有较好的抑制作用. 通过对气液两相脉冲爆轰发动机外流场开展了模拟测量, 验证了优化后的光路布置方式可适应复杂多变流场测量环境, 在实验室内搭建测试系统对小型燃气炉燃烧场分布重建效果进行了分析. 研究结果可进一步推动激光吸收光谱二维重建研究理论, 提升有限投影条件下激光吸收光谱二维重建精度, 推动激光吸收光谱二维重建技术在燃烧诊断领域的应用.
猜你喜欢
军事文摘(2022年8期)2022-05-25
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
南京大学学报(数学半年刊)(2020年1期)2020-03-19
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
中学物理·高中(2018年10期)2018-11-06
上海师范大学学报·自然科学版(2018年3期)2018-05-14
理科考试研究·初中(2017年5期)2018-03-07
