
塔康空空测距工作模式应用研究
2020-12-08 05:23丁永强
西安航空学院学报 2020年5期
丁永强
(空军工程大学航空机务士官学校 航空电子工程系,河南 信阳 464000)
塔康是战术空中导航系统(Tactical Air Navigation System)的简称[1],作为一种重要的机载无线电导航设备,能提供相对于塔康地面台的方位和距离信息,也可实现编队飞机间的空空测距功能。塔康空空测距设置有两种工作模式,分别是空空大和空空小,如不能根据具体飞行场景合理设置塔康空空测距工作模式,将发生无法测距或测距精度变低的问题。
1 塔康空空测距原理
塔康空空测距采用“询问/回答”式脉冲测距方式[2],长、僚机配对工作,即设置成相同的X或Y模式,并相差63个波道,假设某架长机工作于1X波道,则所有编队僚机均应设置为64X波道。在一个编队内,长机只有1架,其余均为僚机,僚机能够测量到长机的距离,长机仅能够测量到最近僚机的距离,僚机间不能相互测距,一架长机能同时完成多架僚机的应答测距。塔康空空测距基本原理如图1所示。僚1测量到长机的距离D1、僚2测量到长机的距离D2,长机只能测量到僚1的距离D1。
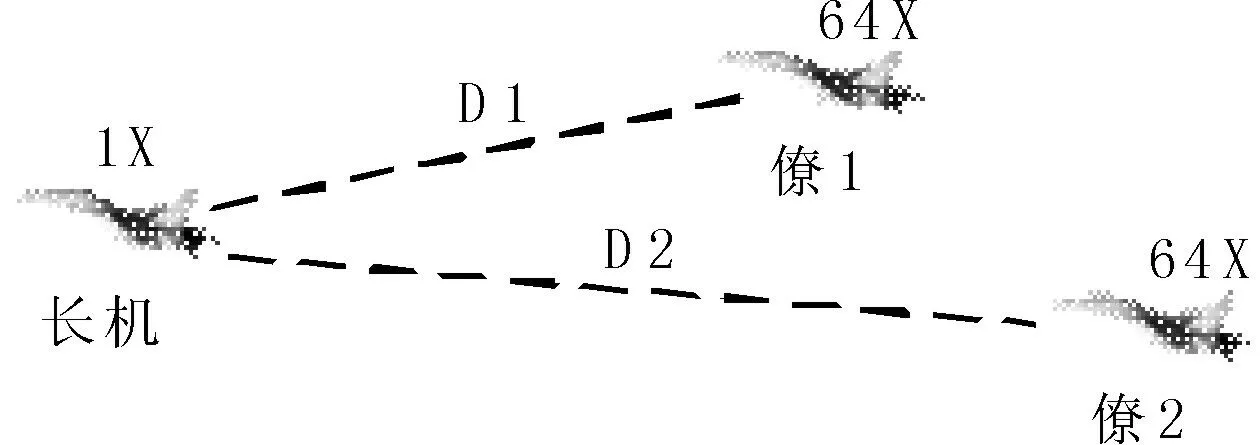
图1塔康空空测距基本原理示意图
1.1 僚机到长机距离的测量
以僚1测量到长机的距离D1为例,先由僚1发出测距询问信号(脉冲对),当询问信号被长机接收以后,长机经过一个固定的时间延迟(t延)后发出应答信号(单脉冲),僚1接收到长机的应答信号后,通过同步识别,获取长机对自己的应答脉冲,根据式(1)计算出距离D1,其传输时间关系[3]如图2所示。
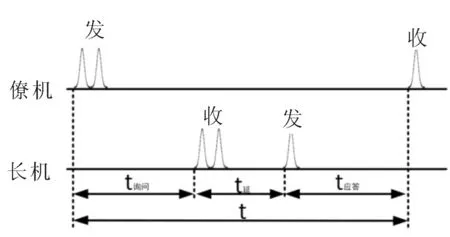
图2僚1到长机测距信号传输时间关系
式中,C为光速。僚2测量到长机的距离D2与D1测量过程一样。为避免某架僚机接收到长机对其它僚机的测距应答信号,出现错误距离跟踪,每架飞机测距询问设备都采用询问速率随机变动的询问方式[4],测距接收设备只接收与自己同步的应答脉冲。
1.2 长机到僚机距离的测量
先由长机发出测距询问信号(脉冲对),无线电波覆盖范围内的所有僚机均会接收到该测距询问信号,各僚机分别进行接收处理,经固定的时间延迟(t延)后发出应答信号(单脉冲),长机接收所有僚机的应答信号,选取与询问信号时间差最短的僚机应答信号(收1)进行锁定,并根据式(1)计算出距离,测量距离为到最近僚机的距离,图1中测量距离为到僚1的距离D1,其传输时间关系如图3所示。

图3长机到僚机测距信号传输时间关系
2 不同工作场景下长、僚机工作模式设置
2.1 双机编队
双机编队如图4所示。长机和僚机都设置为空/空-小工作模式,长机测量到僚1的距离为D1,僚1测量到长机的距离D1,测距精度高。如此时长机设置为空/空-大,长、僚机间测距精度变低。
2.2 3架及3架以上飞机编队
3架及3架以上飞机编队时,长机需根据到僚机间的相对距离之比(距离比)进行针对性设置。
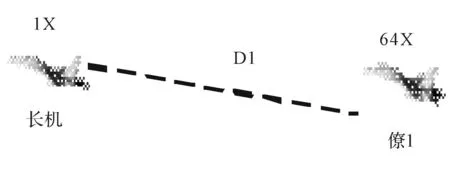
图4双机编队空空距离测量

图5小距离比时空空距离测量
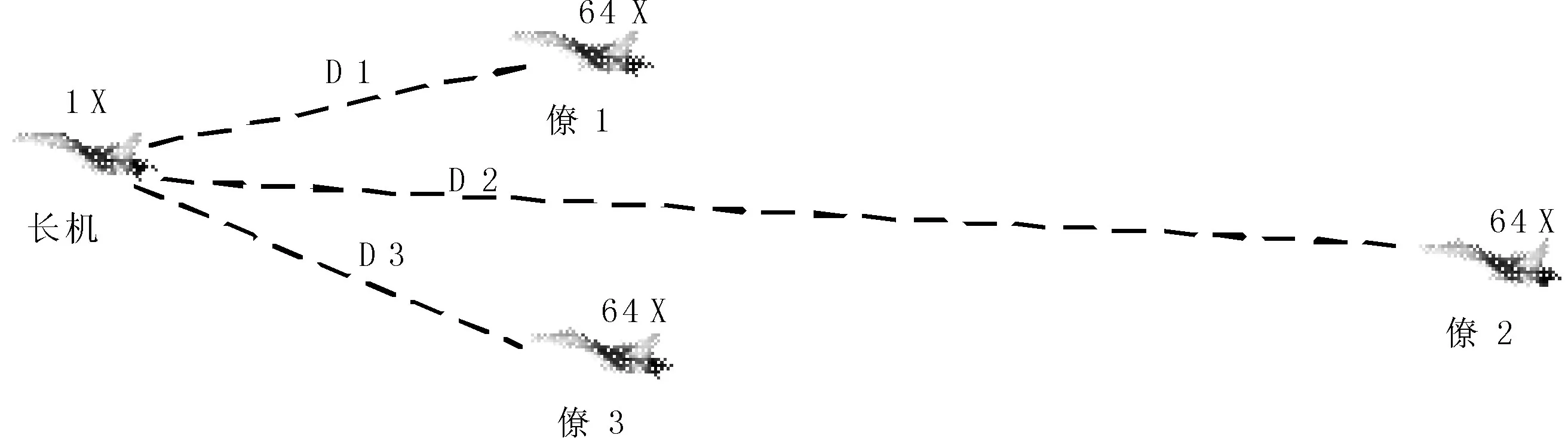
图6 大距离比时空空距离测量
3 工作模式对测距距离比的影响分析
塔康空空测距与超短波话音通信最明显的区别是,超短波话音接收机只接收一路射频通信信号,接收电路根据该射频信号的强弱自动控制接收电路的增益倍数,即实现自动增益控制[5],而塔康空空测距,长机接收设备需要同时接收多路射频询问信号,并进行应答,因此设置有两种接收电路增益控制方式,分别对应两种工作模式,实现不同距离比的测量范围和测量精度。
3.1 空/空-小模式时的测距距离比
当长机工作于空/空-小模式时,长机接收电路增益控制方式与超短波话音接收电路一样,接收电路增益控制方式为自动增益控制,其放大倍数依据距离最近的僚机询问信号,也即最先收到的询问信号进行锁定,同时设计门限使接收电路具有向下12dB至15dB的动态范围。
根据无线电波自由空间传播损耗公式[6]:
Lsys(dB)= 32.44+20lgd(km)+30lgf(MHz)+L大气损耗(2)
传播损耗与当前工作频率、信号传播距离和大气损耗有关,当工作频率和大气条件确定后,传播损耗只与信号传播距离有关。如图5所示,当距离长机最近的僚1以Pt(dBm)功率发射时,经过距离D1(km),损耗为
L僚1(dB)= 32.44+20lgD(km)+30lgf(MHz)+L大气损耗(3)
长机接收到的信号电平为
Pr僚1(dBm)=Pt(dBm)-L僚1(dB)
(4)
=Pt(dBm)-32.44-20lgD1(km)-20lgf(MHz)-L大气损耗
(5)
长机接收电路以此信号作为建立增益控制的基准信号,并随着该信号的强弱变化而自动调整。对于僚2的询问信号,假设其发射功率也为Pt(dBm),经过距离D2(km),长机接收信号电平为:
Pr僚2(dBm)=Pt(dBm)-L僚2(dB)
(6)
=Pt(dBm)-32.44-20lgD2(km)-20lgf(MHz)-L大气损耗
(7)
由于接收电路具有12dB至15dB的动态范围,以最小值12dB计算,当Pr僚1(dBm)-Pr僚2(dBm)<12dB时,长机接收电路能同时接收处理僚1和僚2的询问信号。
当Pr僚1(dBm)-Pr僚2(dBm) >12dB时,由于超出长机接收电路的动态范围,长机接收电路不能正常处理僚2的询问信号。
当Pr僚1(dBm)-Pr僚2(dBm) =12dB 时,将式(5)和式(7)带入,得:
20lgD2-20lgD1=12dB

3.2 空/空-大模式时的测距距离比
当长机工作于空/空-大模式时,长机接收电路增益控制方式为固定增益,长机能接收处理的最强与最弱信号电平的差值不超过30dB。如图6所示,对距离长机最近的僚1发射的询问信号,长机接收信号电平为Pr僚1(dBm),距离长机最远的僚2发射的信号,长机接收信号电平为Pr僚2(dBm),由于长机接收到最强与最弱信号电平的容许差值不超过30dB。
当Pr僚1(dBm)-Pr僚2(dBm)<30dB时,长机接收电路能同时接收处理僚1和僚2的询问信号。
当Pr僚1(dBm)-Pr僚2(dBm)>30dB时,由于超出长机接收电路30dB的容许范围,长机接收电路不能正常处理处理僚2的询问信号。
当Pr僚1(dBm)-Pr僚2(dBm)=30dB时,将式(5)和式(7)带入,得:
20lgD2-20lgD1=30dB

4 结语
本文针对塔康空空测距工作模式设置进行了研究,给出了不同飞行场景下长、僚机空空测距工作模式设置方式,为塔康空空测距的使用提供了有益借鉴。空空编队时,应预先规划好编队队形,并根据编队队形调整情况,合理设置长、僚机塔康空空测距工作模式。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
航天返回与遥感(2021年6期)2022-01-11
小学科学(2020年8期)2020-08-31
小哥白尼·趣味科学画报(2020年1期)2020-06-09
东方少年·布老虎画刊(2018年2期)2018-05-14
小天使·二年级语数英综合(2017年10期)2017-10-31
时代青年(上半月)(2017年1期)2017-02-09
儿童故事画报(2015年7期)2016-01-27
儿童故事画报(2015年4期)2015-05-25
