
内河渡船危险预警及避碰决策
2020-12-09 01:57李丽娜高建杰李国定
中国航海 2020年3期
郭 健,李丽娜,高建杰,李国定
(集美大学 航海学院, 福建 厦门 361021)
《中华人民共和国内河避碰规则》规定内河渡船有责任主动避让顺航道船舶。在长江流域繁忙的渡口水域,每天都会有大量的内河航运船舶经过,因此内河渡船面临着一定的安全风险。为渡船的航行提供实时准确的碰撞危险预警和避碰辅助决策,提高渡船运营的智能化水平,是目前急需解决的科研难题。当前碰撞危险度模型研究主要有最近会遇距离(Distance to Close Point of Approaching,dCPA)和最近会遇时间(Time to Close Point of Approaching,tCPA)的加权评判法[1]、以模糊数学为基础的模糊判断法[2]和人工智能技术判断法。[3]这些方法都是单独计算危险度,没有考虑避让危险船舶的难易程度,即没有与避让决策相关联。船舶拟人智能避碰决策(Personifying Intelligent Decision-Making for Vessel Collision Avoidance,PIDVCA)算法[4-7]能有效解决宽阔水域船舶辅助避碰决策问题,在受限水域初步实现港口水域的船舶碰撞与搁浅触礁危险预警和避碰决策的仿真测试。[8-10]
为给内河渡船驾驶员提供与主观感受一致的碰撞危险等级预警,安全有效且符合驾驶员避让操纵习惯的避碰决策,本文基于PIDVCA基础模型和算法,结合内河渡船驾驶员的经验,对内河渡船的碰撞危险预警及避碰决策进行研究。
1 不同等级碰撞危险预警量化模型
1.1 碰撞危险预警等级量化依据
渡船通常采用改向加变速的方法避让过往船舶,同时将避让行动及时告诉来船。文献[11]详细阐述镇扬汽渡船(镇江来往扬州的汽车渡船)避让操纵方法。在相同的会遇态势下,当来船与渡船存在碰撞危险时,来船的大小会影响渡船驾驶员的避让操纵,其大小根据当地的规定区分。当来船为大船时,一般危险情况下渡船驾驶员会选择小角度改向加速通过大船的艏部,中等危险情况下渡船驾驶员会选择中等角度改向减速通过艉部,较危险情况下渡船驾驶员会选择大角度改向减速通过艉部。当来船为小船时,中等危险情况下渡船驾驶员会选择中等角度改向通过艏部,其他情况与大船一致。
综上所述,将危险等级划分为一般危险(一级危险)、中等危险(二级危险)和较危险(三级危险)等3种等级。在不同会遇局面、不同碰撞危险等级情况下,渡船驾驶员会有不同的避让操纵,以此为依据,采用相对运动几何分析法建立碰撞危险预警等级量化模型,通过计算每种操纵方式的施舵时机确定会遇局面的危险等级。当来船与渡船形成危险态势时:若小角度加速过艏部的施舵时机大于0,表明还有时间采取小角度改向加速的操纵方式通过来船的艏部,此时对应的危险等级为一级危险;若小角度加速过艏部的施舵时机小于0,中等角度变速的施舵时机大于0,表明还有时间采取中等角度改向和变速的操纵方式经过来船的艏部或艉部,此时对应的危险等级为二级危险;需通过大角度减速的操纵方式经过来船的艉部时对应的危险等级为三级危险。在各危险等级下改向角的大小由专家知识库决定。
1.2 碰撞危险预警等级量化几何模型
在一般情况下,内河渡船与顺航道航行的船舶形成的会遇局面都是交叉局面。以左交叉会遇局面为例,采用相对运动几何分析法对渡船和来船会遇态势进行建模,见图1。

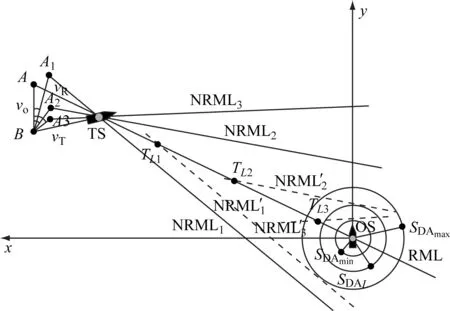
图1 渡船预警几何模型
临界碰撞距离SDAmin为两会遇船舶在不避让的情况下安全通过的最小值,两船会遇小于该值就会发生碰撞。临界安全会遇距离SDAL为在SDAmin的基础上加上专家知识库中的安全富余量MS得到的数值,该值为渡船驾驶员对会遇局面是否存在危险的主观感受值,将其作为危险判断的阈值。将SDAL作为安全会遇距离SDA的内边界。当tCPA≥0且|dCPA|≤SDAL时,表示渡船当前的会遇存在危险,之后才会进入危险等级的判断。SDAL为渡船在中等危险时的两船通过距离,其计算见式(1)。安全富余量需要根据当时的渡船与他船的会遇局面和他船的船速、大小、通过渡船艉部或艏部在专家知识库中选取。最大安全会遇距离SDAmax是在SDAL的基础上加上1次渡船操纵余量MS_c得到的,此距离为保证渡船避让他船时仍有1次操纵的余地,使两船能在SDAL外通过。将SDAmax作为安全会遇距离的外边界,即SDA∈(SDAL,SDAmax)。SDAmax为渡船在一般危险时两船通过的距离,其计算见式(2)。当渡船通过他船艏部时,MS_c的取值为渡船在一般危险时的操纵延迟量;当渡船通过他船艉部时,MS_c的取值为渡船在中等危险时的操纵延迟量。
SDAL=SDAmin+MS
(1)
SDAmax=SDAL+MS_c
(2)
在相对运动几何模型中求解目标船相对于渡船的相关参数。定义相对运动航向为Cr,avO为变速之后的渡船航速,见式(3);改向幅度为AC,变速幅度为vAO,sign(vAO)为变速符合函数,加速时为1,减速时为-1。新的相对运动航速vrn见式(4),新的相对运动航向Crn见式(5)。
avO=vO+sign(vAO)×vAO
(3)
(4)
(5)
RML和NRML′的直线方程见式(6),sign(SDA)为SDA的符号函数,该值与交汇特征相关联。
(6)
将计算出的Crn代入式(5)中即可求出转向点的坐标为b(xb,yb)。
(7)
考虑到渡船操纵的延迟,将该延迟转化为目标船在相对运动中呈现出的相对位移SS。[10]首先计算出横向x轴和纵向y轴上的位移分量为
(8)
式(8)中:t为渡船转向所用的时间;dTm为旋回初径;dAdm为旋回进距;Ct为目标船的真航向。对dTm、dAdm的计算暂时采取简化处理,取渡船全速转向小角度、中等角度和大角度等3种情况下的数值。
相对位移SS为
(9)
估计施舵点,在RML线上取点a(xa,ya)作为施舵点,由式(8)和式(9)可得出点a的计算式为
(10)
由此可计算出到达施舵点的时间为
(11)
将(6)和式(7)中的SDA替换为SDAmax、SDAL和SDAmin即可计算出施舵时机TL1、TL2和TL3。当计算出的各最晚施舵点的距离小于两船之间的距离时,令对应的施舵时值负。
1.3 危险等级判断阈值模型
为实时判断渡船和危险来船所处的危险等级,对模型计算出的各施舵时机进行评判,建立危险等级判断模型为
1) 1级预警(一般危险):TL1≤alarm且TL1≥0。
2) 2级预警(中等危险):TL2≥0且TL1<0。
3) 3级预警(较危险):TL3≥0且TL2<0。
阈值alarm为预警提前量,即当模型计算出的TL1小于此值之后才开始预警,alarm的取值由渡船驾驶员设置。
1.4 碰撞危险预警算法设计
运用PIDVCA基础模型和算法设计碰撞危险预警算法流程见图2。渡船预警算法主要步骤如下。
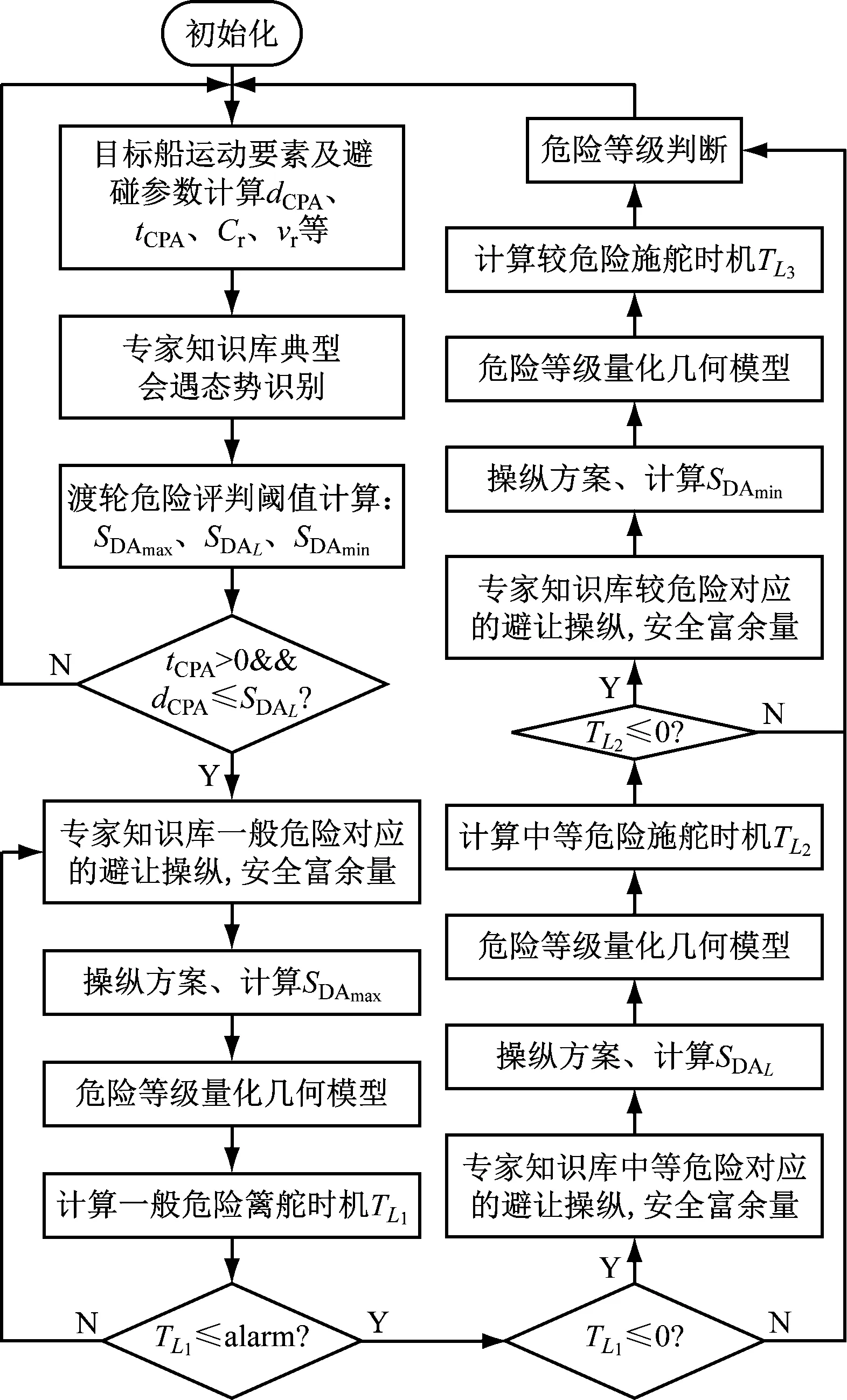
图2 渡船碰撞危险预警算法流程
1.4.1运动要素和避碰参数计算
计算每艘来船的tCPA、dCPA、Cr和vr等参数。
1.4.2典型会遇态势的识别
由态势识别算法根据每艘来船的船长、航向和本船航向可识别出渡船的运营方向和与来船的会遇态势,船长主要识别过往船舶为大船或小船。
1.4.3计算渡船危险评判阈值
根据每艘来船与渡船的会遇关系计算来船与渡船的SDAmin,根据会遇态势和dCPA符号判断渡船过目标船的艏或艉,进而从专家知识库中找到渡船对应每艘来船的安全富余量MS,并计算渡船与每艘来船的SDAL和SDAmax。
1.4.4危险判断
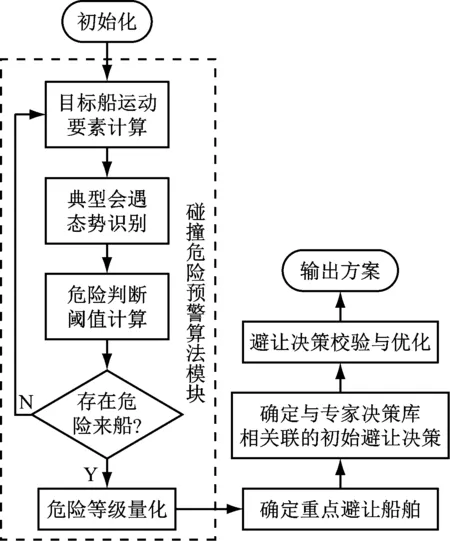
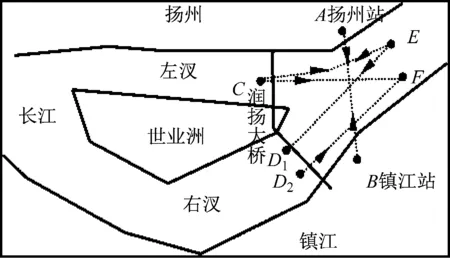
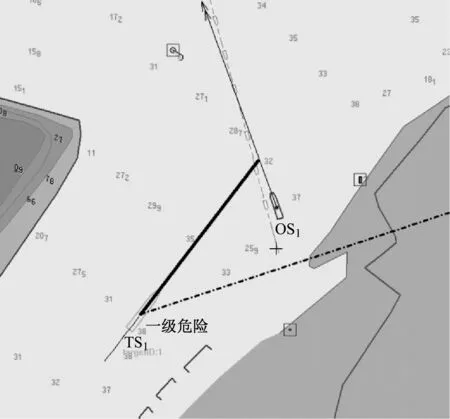
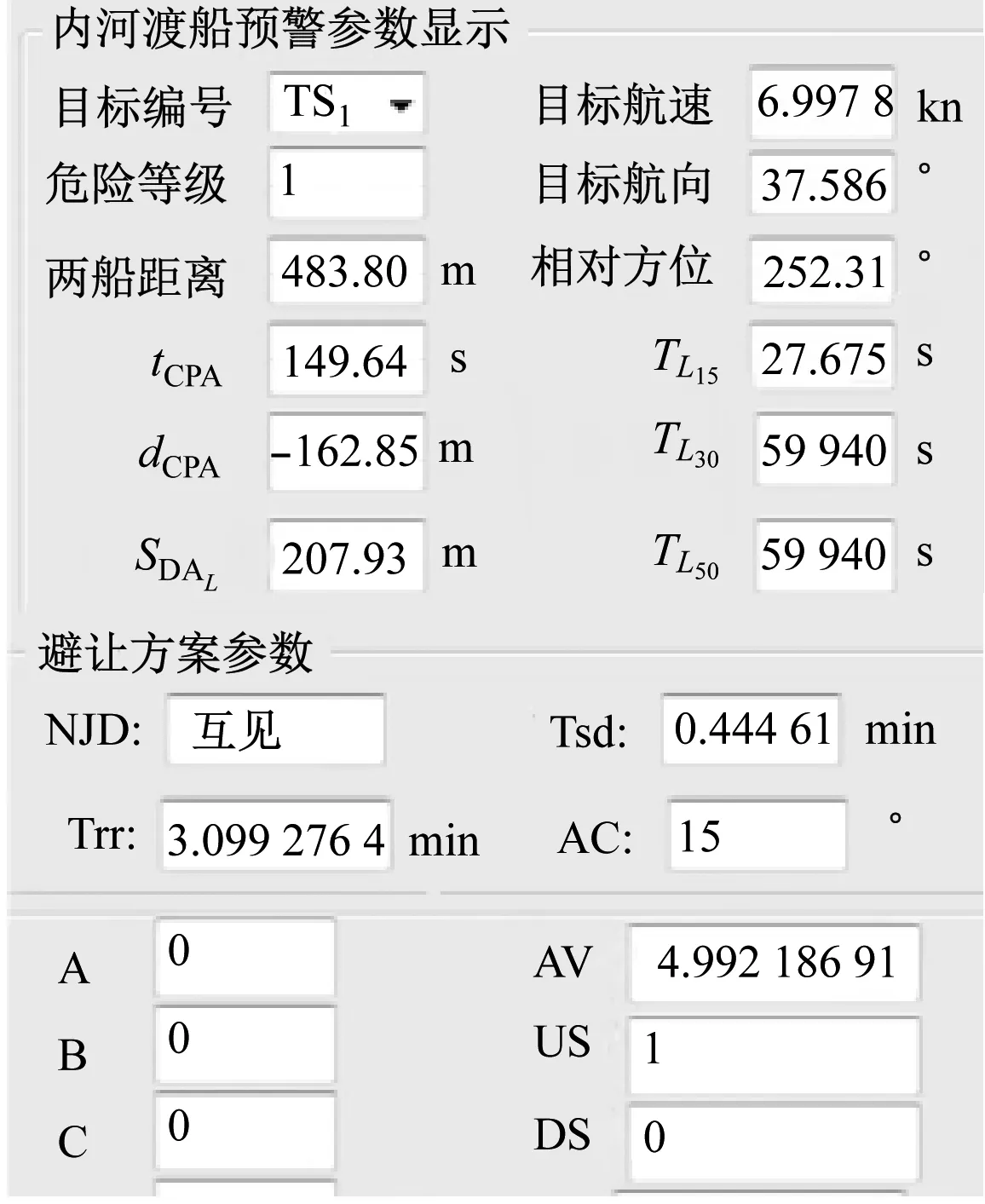
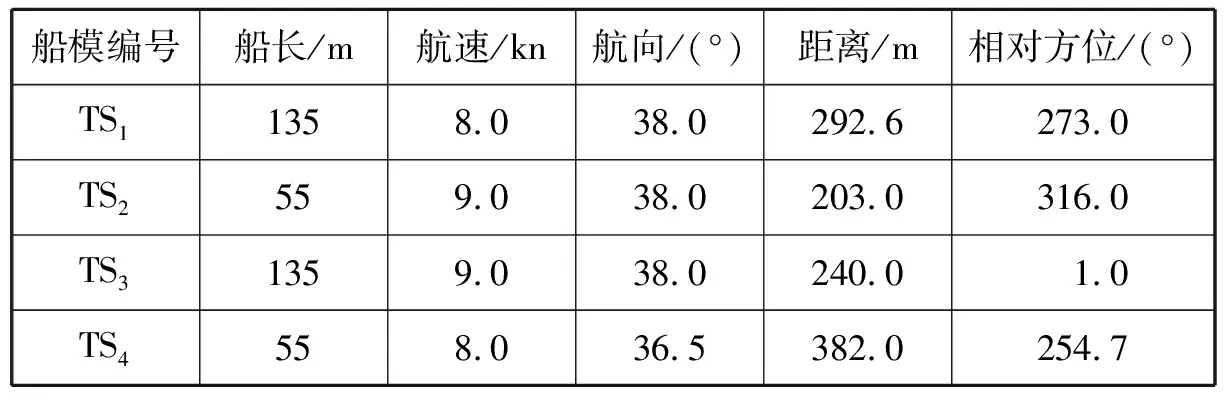
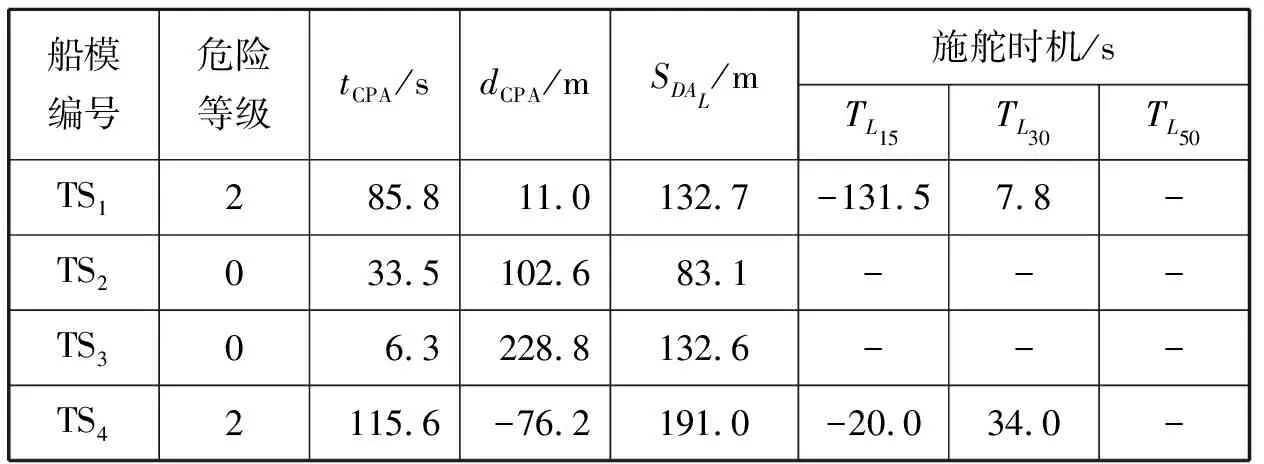
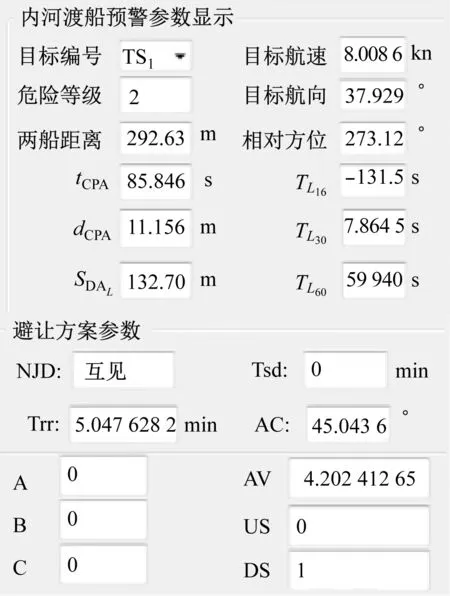
如果tCPA为正值且dCPA 1.4.5专家知识的关联 根据每艘存在危险的来船与渡船的会遇态势,从专家知识库中给出渡船对应每艘危险来船一般危险下的专家决策。 1.4.6预警模型参数计算 首先计算每艘危险来船对应的TL1,并判断TL1是否小于alarm,若大于alarm,则转入第4.1.5节继续计算TL1。反之,判断TL1是否大于0,若大于0,则转到第4.1.7节,反之转到第4.1.5节,关联渡船对应的每艘危险来船二级危险决策,并计算SDAL使用的安全富余量MS,计算每艘危险来船的TL2,判断TL2是否大于0,若大于0,则转到第4.1.7节,反之转到第4.1.5节,关联三级危险决策,计算TL3之后转到第4.1.7节。 1.4.7危险等级判断模型 将渡船对应每艘危险来船的TL1、TL2和TL3代入危险判断,进行危险等级的判断,转到第4.1.1节继续监控。 以PIDVCA算法为基础,结合内河渡船驾驶员的专家避让操纵知识库,初步完成算法的设计与仿真。 PIDVCA算法是以《国际海上避碰规则》为准则,综合考虑船舶操纵性、海员的习惯做法和优良船艺,运用相对运动几何原理建立船舶会遇态势数学模型,并实现对船舶会遇态势的定性分析和对目标船相关参数的定量计算,最终完成自动推理、决策评估和决策输出。[4-7] 基于PIDVCA基础模型和算法设计内河渡船危险预警和避碰决策算法流程见图3,该算法与开阔水域PIDVCA算法的主要区别在于:穿越航道的渡船为让路船;初始避让决策以航行区域典型会遇态势下的专家避让操纵决策库为基本依据。该算法的主要步骤如下。 图3 渡船危险预警和避碰决策算法流程图 2.2.1碰撞危险等级的量化 利用渡船碰撞危险预警等级算法判断各来船是否存在危险以及确定危险来船的危险预警等级。 2.2.2避让重点船的确定 根据各危险来船的TL1的施舵时机确定重点避让船,TL1越小越危险,当只有1艘船时,该来船为重点避让船。 2.2.3与专家决策库相关联的初始避让决策的确定 根据重点避让船的会遇态势和危险等级,在专家决策库中找到对应的初始避让决策。 2.2.4最终避让决策的校验与优化 以初始决策为基础,效验与优化生成最终的避让决策,确定决策能安全避过周围的所有船舶。 2.2.5方案输出 输出各危险来船的预警等级和避让决策。 以镇扬汽渡水域为例,在SIHC平台上模拟该水域的局部交通流,并将内河渡船危险预警和避碰决策算法集成到本船端。本船端集成镇扬汽渡船的MMG(Mathematical Model Group)模型,使用模糊自动舵对船模控制。当危险等级为一级时,平台上目标船的速度矢量线会变成蓝色,二级时为橙色,三级时为红色。 镇扬汽渡船水域位于长江流域的江苏段,连接镇江和扬州,主要担任运输车辆和旅客的任务,两岸直线距离1.6 km,正常情况下1个班次用时约8 min,渡船由2个前后可360°旋转的螺旋桨控制航向,操纵灵活。镇扬汽渡船水域交通流见图4,其中:标志符之间的连线为不同的航道;箭头为航道的方向。第3.1节采用从B点(镇江站)到A点(扬州站)方向的渡船,以与D2F航道运行的目标船形成的左交叉的会遇态势为案例进行仿真研究。[11]根据《长江江苏段船舶定线制规定(2013)》的规定:大型船舶是指船长80 m及以上的船舶、船队(吊拖船队除外);小型船舶是指大型船舶之外的船舶、船队。 通过咨询丰富经验的镇扬汽渡船船长和调查问卷,得出不同会遇态势下的安全富余量和避让操纵决策库。避让操纵决策库和左交叉D2F会遇态势时的知识库分别见表1和表2。 图4 镇扬汽渡水域交通流 表1 避让操纵专家知识库相关内容 表2 MS专家知识库相关内容 由表1可知:镇扬汽渡船改向的小角度为15°,中等角度为30°,大角度为50°,施舵时机分别对应TL15、TL30和TL50,通过“镇扬汽渡船监控系统”实船观测渡船航速的变化,发现渡船在避让减速时其航速在大多数情况下降到1~2 kn,加速时可上升到8~10 kn。通过咨询渡船驾驶员,alarm的值设置为30 s。 3.2.1单目标船避碰仿真 渡船参数:航向340°,航速4 kn,船长76.5 m。 目标船:航向37.5°,航速7 kn,船长135 m,两船距离为483 m。 渡船与来船初始态势和预警效果见图5,初始位置时两船的预警和避让决策参数见图6。此时|dCPA| 图5 单目标船会遇初始状态和预警效果 3.2.2多目标船避碰仿真 渡船参数为:航向340°;航速5 kn。目标船参数见表3。 渡船初始态势图见图9,4艘目标船从左下角开始,依次为TS4、TS1、TS2和TS3。预警参数是重点避让船TS1的相关参数见图10,所有目标船的初始状态下的危险预警参数见表4。 图6 预警和避让决策参数 图7 单目标船安全避让效果图 图8 渡船实时dCPA变化曲线 图9 多目标船会遇初始状态和预警效果 由表3和表4可知:存在危险的目标船为TS1和TS4,他们的TL15均小于0,TL30均大于0,两船和渡船处于二级危险状态,根据TL30的值可确定重点避让船为TS1。TS2和TS3的dCPA均大于其临界安全会遇距离SDAL,故不存在危险。此时针对重点船为大船的初始避让决策为改向30°并减速通过艉部,最终给出的优化决策方案参数见图10。方案为立即施舵,向右改向45°并减速4 kn,DS为减速标识符,复航时机为2.5 min。渡船采取避让决策之后的效果见图11。渡船对各目标船的实时dCPA和tCPA的变化曲线见图12。图11中只有dCPA的数值一直是在TL50的,这是因为渡船以TS1为重点目标船自动生成决策。100 s之后,除了TS4之外,所有目标船的tCPA都小于0。由图11可知:此时渡船与目标船TS4变为TS4追越渡船的态势,两船的dCPA在50 m附近波动,通过在“镇扬汽渡船监控系统”平台上进行实船观测,此距离在安全范围之内。 表3 试验场景参数设置 表4 船舶预警参数 图10 重点避让船预警和决策参数 图11 多目标船安全避让效果图 a) dCPA变化曲线 2个试验仿真结果证明:本文建立的与专家知识相关联的危险等级量化模型和避碰决策算法能实现渡船与危险来船的危险等级预警功能,并能为危险渡船提供符合渡船驾驶员避让操纵行为习惯的避让方案。 本文建立与专家知识相关联的渡船碰撞危险预警等级量化几何模型,并基于PIDVCA基础算法,初步实现与专家知识相关联的渡船避碰决策算法的设计。通过在SIHC上模拟镇扬汽渡水域的局部交通流,对算法进行仿真测试。结果表明:该算法能实现与专家避让决策相关联的危险等级预警功能,并自动生成与渡船驾驶员避让操纵习惯一致的避碰决策。该研究为后续渡船避碰避险复合算法的研究和最终的实船应用提供了理论支持,算法的完备性有待后续进一步完善和仿真验证。2 避碰决策算法设计
2.1 PIDVCA算法
2.2 渡船避碰算法设计
3 仿真及结果分析
3.1 镇扬汽渡船专家知识库


3.2 渡船预警和避碰仿真





4 结速语
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
包装工程(2022年1期)2022-01-26
意林原创版(2021年7期)2021-08-03
歌海(2019年4期)2019-11-04
小天使·二年级语数英综合(2018年11期)2018-11-23
中学科技(2015年11期)2015-11-25
小说月刊(2014年11期)2014-04-18
