基于变论域模糊滑模观测器的微网逆变器系统容错控制
2020-12-16 00:55马良,许刚
科学技术与工程 2020年31期
马 良, 许 刚
(华北电力大学电气与电子工程学院, 北京 102206)
微网逆变器系统由分布式电源(distributed generation, DG)、逆变器、传感器、控制器等模块组成[1-2],其控制性能决定微网稳定运行的能力。现有微网控制方法包括恒功率控制、滑模控制、模型预测控制[3]等,上述策略均以电压互感器(potential transformer, PT)与电流互感器(current transformer, CT)的精确量测信号为基础,通过电压、电流反馈形成闭环,实现逆变器脉冲宽度调制(PWM)信号的调节。一旦电压、电流量测信号异常或遭受人为干扰,已有的稳定控制策略将失效,危害微网的运行稳定性。
随着电力信息物理融合系统(power grid cyber physical systems, PGCPS)的发展,微网并网点电压、电流量测装置在物理层发生本体故障以及在信息层遭受虚假数据注入攻击(false data injection attacks, FDIA)[4-5],都可能造成量测信号异常。针对异常量测信号设计容错控制策略,对保障微网安全稳定运行至关重要。现有针对微网逆变器系统故障诊断及容错控制的研究集中于DG物理故障[6]、逆变器的开路和短路故障[7]以及微网内部线路或负载故障[8]等,针对电压、电流量测装置故障及FDIA的研究较为缺乏。文献[9]针对微网传感器网络攻击问题,提出基于专家经验融合机器学习的异常量测信号检测与基于卡尔曼滤波器的弹性控制策略。文献[10]针对直流微网传感器故障与网络攻击问题,设计基于多次坐标变换的Edwards型滑模观测器,进行故障诊断与控制重构。文献[11]采用递归卷积编码增加网络攻击下的微网电压量测信号状态冗余,并结合卡尔曼滤波器设计半正定规划的稳定控制律。文献[12]提出一种适用于拒绝服务攻击的无迹卡尔曼滤波方法,对电网状态进行动态估计。上述文献中,基于机器学习方法的微网传感器故障及网络攻击检测易造成错检与漏检,且无法实现对故障及攻击信号的重构;采用的状态估计方法虽能在一定程度上实现对异常信号的重构,但存在观测器设计复杂、异常信号重构精度较低,以及适用的故障及攻击场景较为单一的问题。
采用滑模观测器(sliding mode observer, SMO),基于系统的状态空间模型对异常状态进行重构,可实现对故障及攻击的主动容错[13-14]。滑动模态的不连续切换动作对系统参数摄动及外部扰动具有较强的鲁棒性,且不需预先给定异常信号的模型,理论基础较为完备,易于工程实现。
现提出基于SMO融合变论域模糊控制(variable universe fuzzy control, VUFC)的微网逆变器系统异常量测信号估计与电流补偿容错控制策略。基于电流量测量设计输出反馈线性二次型最优控制器,然后构建故障及网络攻击下微网的状态空间模型,采用线性矩阵不等式方法设计SMO并对异常信号进行估计,在确保稳定性的同时简化设计步骤。最后提出基于模糊推理的VUFC方法动态调整滑模增益,在避免伸缩因子函数选取困难的同时提高对异常信号的估计精度。最后验证多种故障及攻击场景下容错控制策略的有效性。
1 微网CT故障及FDIA建模
1.1 微网逆变器控制系统
如图1所示,是典型微网逆变器系统并网运行控制框图。以单台逆变器为例,理想DG输出电压为vdc,经电压源逆变器(VSI)及LC滤波电路与配电网连接。传感器模块中,逆变器输出电流it,abc由CT量测得到,并网点PCC处电压vs,abc由PT量测得到。控制模块中,外环功率计算环通过接收能量管理系统(EMS)下发的参考功率Pref和Qref计算得到内环电流控制环的参考输入id,ref和iq,ref,内环电流控制环对发送给VSI的PWM控制信号进行调节,确保微网的输出功率P、Q跟踪参考功率。
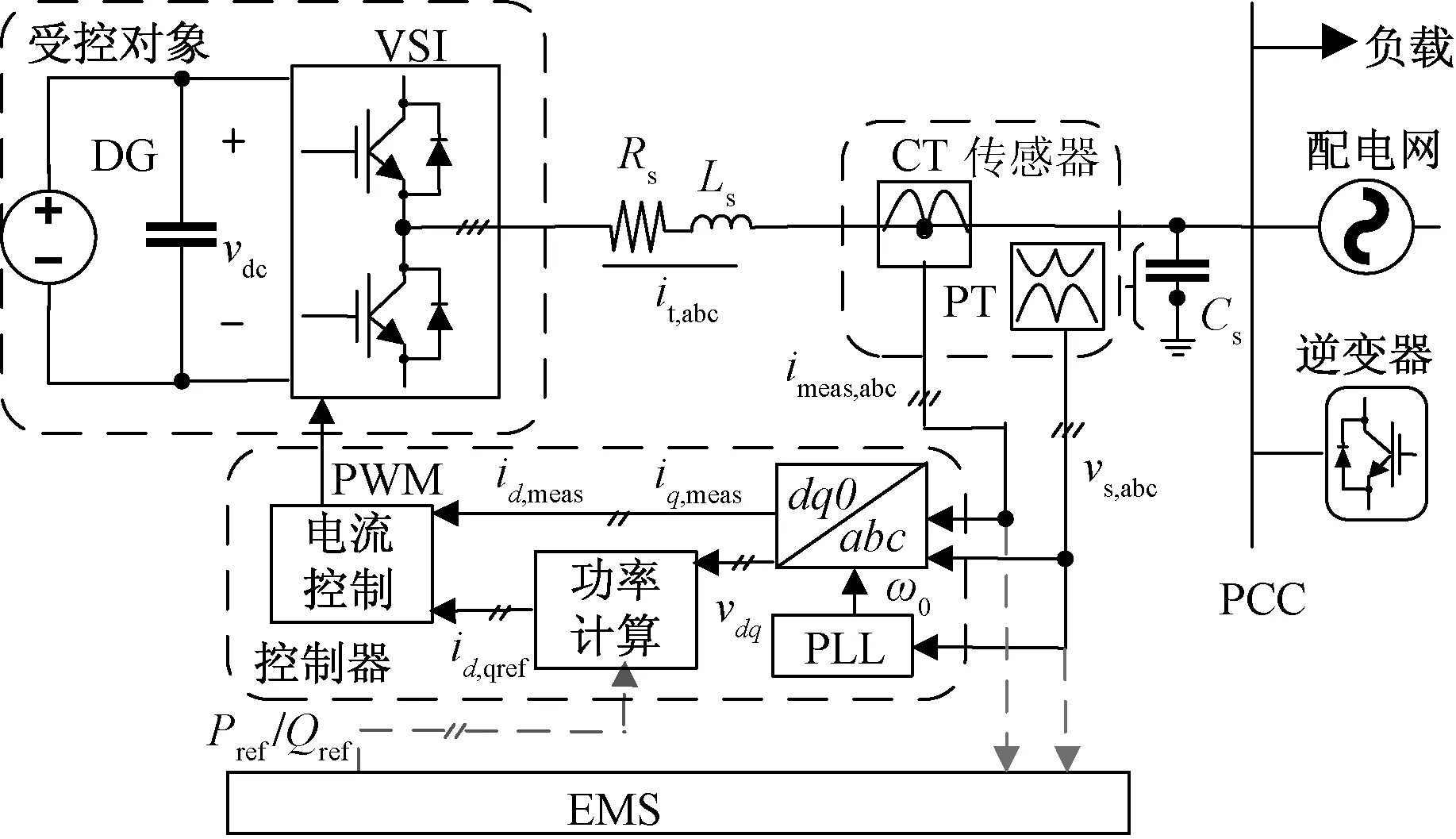
图1 典型微网逆变器系统并网运行控制框图Fig.1 Typical model of a grid-connected inverter in microgrid
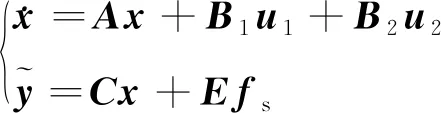
根据文献[15],在dq坐标系下微网逆变器系统的状态空间方程可描述为
(1)


(2)
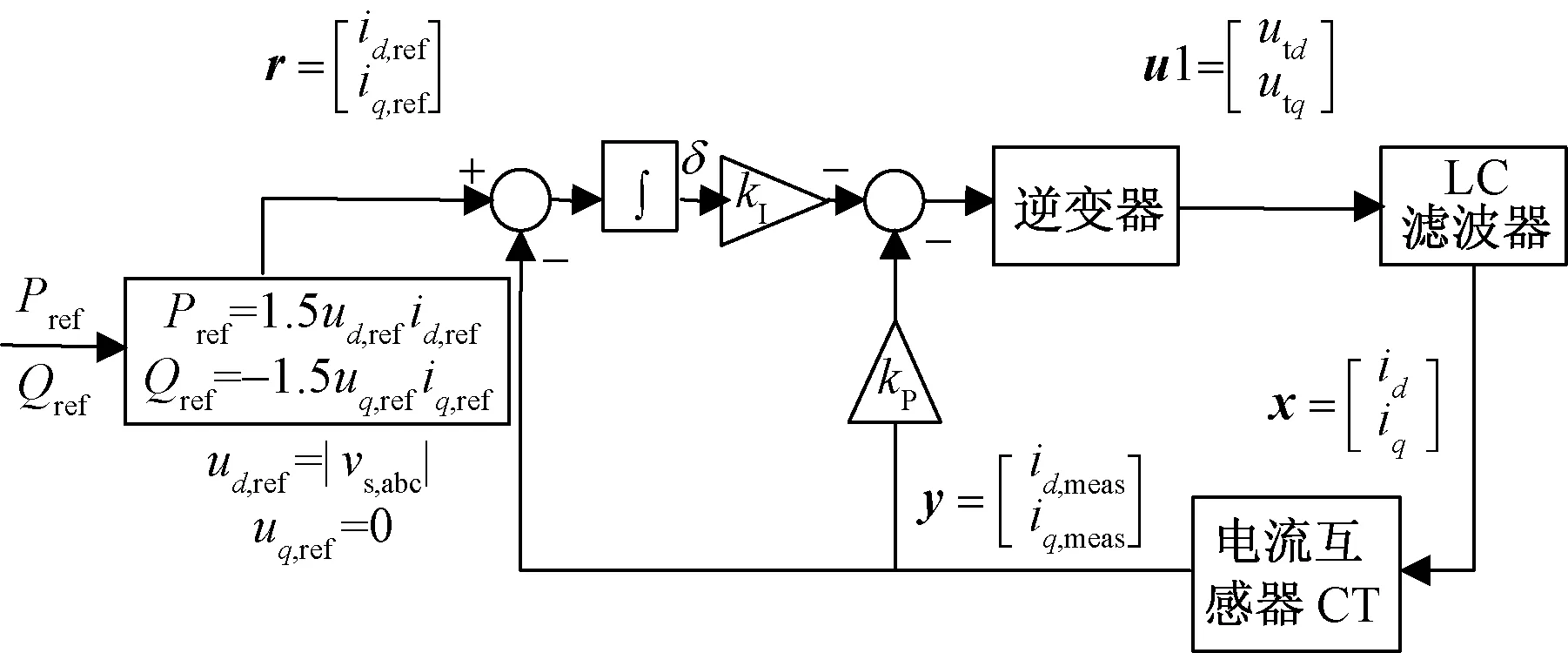
图2 基于电流量测量的电流环输出反馈控制器Fig.2 Output feedback controllerwith current measurements
1.2 CT故障及FDIA对微网影响分析
如图3所示,是PGCPS环境下微网逆变器系统CT故障及FDIA示意图。微网的电流量测信号一方面驱动本地控制器运行,另一方面经通信网络向EMS系统进行传递;EMS系统发送参考功率信号对各DG的有功无功出力进行调节。
在PGCPS环境下,正常并网运行的微网其电压和频率由配电网提供支撑,一旦微网输出电压和频率信号与配电网不一致,则可认为PT、PLL发生故障或电压、频率量测信号遭受人为攻击;有功、无功功率的量测值可通过电压和电流量测信号的乘积进行校验,所以单纯攻击功率量测信号较易识别。因此,电流量测信号异常应是并网模式微网容错控制研究的重点。电流量测信号异常可能由于以下两方面原因引起:
(1)CT本体故障导致量测功能异常。CT由线圈测量单元、信号调理电路、数据采集模块等构成[16]。微网逆变器系统复杂的运行工况可能造成CT各组成模块发生故障,从而引起电流量测信号的幅值和相位存在误差以及传感器数据缺失等。
(2)网络攻击导致量测数据异常。作为网络化控制系统,网络入侵者可根据微网设备的IP地址对电流量测信号进行数据注入攻击,以影响微网及配电网的安全稳定运行,其攻击方式主要包括随机攻击、斜坡攻击、重放攻击、尺度攻击等[17]。
在故障信号和FDIA作用下,经由CT得到的电流量测信号可表示为

(3)
式(3)中:fs=[fid,fiq]T∈Rq=2表示dq轴电流量测信号的异常值。由于VSI经过Y/Δ变压器与配电网相连,可确保零序电流为0,故可不考虑电流零序分量的异常量测值对微网逆变器系统的影响。
由式(1)和式(3)可知,当发生CT故障与FDIA时,微网逆变器系统的状态空间方程为
(4)
2 基于SMO的容错控制策略
针对微网逆变系统发生CT故障及数据注入攻击,设计SMO对异常信号进行估计,基于异常信号的估计值对电流量测信号进行补偿,确保微网逆变器系统在原有控制律的作用下正常工作。
2.1 SMO设计及稳定性分析
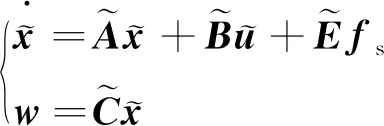
(5)



假设3未知电流量测量异常信号fs有界,即‖fs‖≤ρs,其中ρs为已知正标量。
则灯器连续工作20个日历天的耗电量为50A▪h(灯器工作在阴雨天气下,考虑电池在20天内没有发生充电,连续处于放电之下)。同时为保证连续的放电不对电池造成损伤,放电深度应控制在55%。由此可知,电池容量要求为:
由增广系统的状态空间方程式(5)及其状态转移矩阵与输出矩阵的结构可知,假设1与假设2一定成立;考虑到电流量测信号的有界性以及攻击者能量的有限性约束,异常信号fs的有界性在通常条件下可以满足,在工程应用时,ρs可根据输出电流的范围进行选取。根据式(5)构造SMO可得:
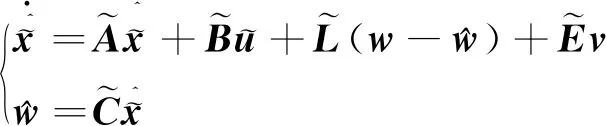
(6)
(7)
式(7)中:滑模增益K>ρs,‖·‖表示欧几里得范数。

(8)
定理1在假设1~假设3成立的条件下,对于式(6)所设计的SMO,存在对称正定矩阵P1、P2及矩阵Y=P2L0∈Rp×p,使得如下的线性矩阵不等式有解,则可确保所设计的SMO误差渐近稳定:
(9)


(10)

证明结束。
由定理1可知,状态误差e渐近收敛到0,即limt→e(t)=0。因此,存在时间t0,使得t>t0时状态误差e有界,即‖e‖≤θ,θ为一正标量。


(11)
证明:定义Lyapunov方程Vs=0.5sTs,并对其求导可得:

(12)
由‖e‖≤θ可知:


(13)
证明结束。
2.2 异常信号估计及容错控制策略设计

(14)

(15)

(16)

图4 基于SMO的容错控制策略Fig.4 Fault-tolerant control based on SMO

3 基于VUFC的滑模增益调整
常规SMO选取固定增益系数造成观测器的输出与异常信号的估计存在较大抖振,影响所设计的容错控制策略的性能。根据滑模面到达条件与VUFC原理,设计SMO增益动态自适应调整策略,提高估计性能,削弱抖振效应。
3.1 滑模增益在线调整规则
在线动态调整滑模增益,其目的在于使SMO的运动轨迹尽快趋近于滑模面,并保持在其上运动,趋近于滑模面的速度决定所设计的SMO的控制品质。

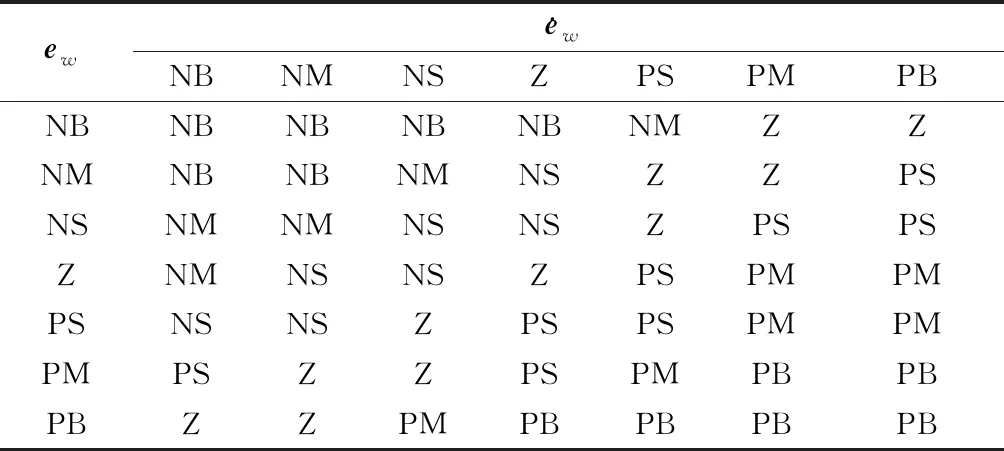
表1 滑模增益调整模糊控制规则
输入输出模糊规则确定后,采用Mamdani法则进行模糊推理,并使用重心法解模糊化:

(17)
式(17)中:Ci与m分别表示输出论域集合隶属度函数的峰值与模糊划分数;μ(Ci)表示Ci对应的隶属度值。得到滑模增益变化量ΔUK后,则滑模增益更新规则为K=ηρs+KΔUΔUK,其中η=1.4~1.6,目的是使滑模增益满足K>ρs的条件。
3.2 基于模糊推理的论域伸缩因子设计
常规模糊控制虽然具有较好的鲁棒性,但是其控制效果易受到所设计的模糊控制规则数量的限制,无法同时满足响应速度与控制精度的要求。引入变论域思想自适应调节输入输出论域的范围,在不增加模糊规则的前提下,提高模糊控制系统的逼近性能和控制品质。

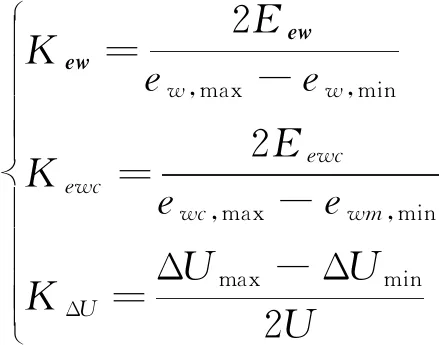
(18)
通过引入伸缩因子,使得上述论域能够根据输入输出控制量的实际大小自适应收缩和膨胀。设输入输出论域的伸缩因子分别为αew、αewc及βΔU,经伸缩因子调节后的论域分别为[-αewEew,αewEew]、[-αewcEewc,αewcEewc]及[-βΔUU,βΔUU]。通过论域的伸缩变换,在不改变隶属度函数形状及模糊控制规则的条件下,使得局部的控制规则得到细化,提高控制精度。VUFC动态调整滑模增益K的结构框图如图5所示。
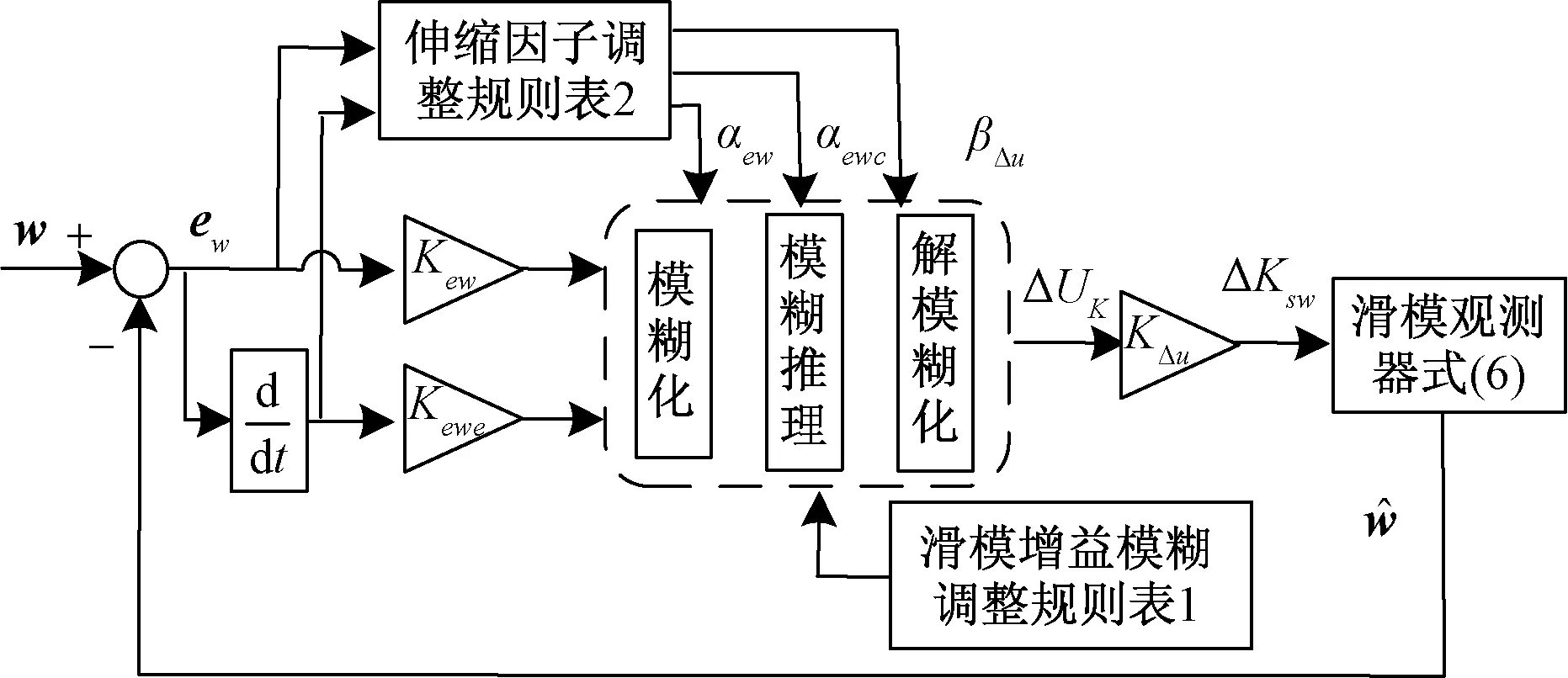
图5 变论域模糊控制器结构框图Fig.5 Variable universe fuzzy controller
常规伸缩因子基于指数函数或分段函数进行设计,存在参数确定复杂、需反复试凑的困难[18]。因此,设计基于模糊推理的伸缩因子自调整算法。输入输出论域伸缩因子αew、αewc及βΔU采用相同的模糊子集{Z,S,M,B},隶属度函数为峰值点为{0.2,0.4,0.6,0.8}的三角形函数。所设计的模糊控制调节伸缩因子规则如表2所示。
4 仿真与实验
在MATLAB/Simulink平台下搭建仿真模型,对微网逆变器系统在CT故障及虚假数据注入攻击下的运行状态以及本文提出的容错控制策略进行仿真验证。微网并网模式控制结构如图1所示,DG输出电压vdc=1 000 V,LC滤波器的参数为Rs=1.55 Ω、Ls=4 mH、Cs=1 500 μF,逆变器系统经380 V/10 kV变压器与配电网相连。输出反馈二次型最有控制器、滑模观测器以及模糊控制的相关参数如表3所示。

表3 仿真相关参数
4.1 微网典型CT故障及攻击场景仿真验证
在未采用本文容错控制策略的条件下,选取典型故障及攻击场景,模拟CT故障及FDIA对微网运行状态的影响。t=0 s时微网启动,参考功率Pref=0.5 p.u.、Qref=0 p.u.;t=0.2 s时,参考有功功率升高至Pref=1 p.u.;t=0.3 s时,选取以下4种场景进行仿真:①CT数据缺失故障,致使b相c相电流量测值为0,即imeas,b=imeas,c=0;②CT数据采集故障,致使a相电流量测值imeas,a幅值减小为原来的0.35倍,并叠加180°相角;③攻击者根据CT的IP地址,直接对dq轴电流量测量分别注入fid=1 000t、fiq=rand(70,120)的斜坡信号与随机信号;④攻击者在0.3~0.35 s对c相电流量测值imeas,c进行尺度攻击使其幅值增加为原来的2倍,在0.4~0.5 s进行重放攻击,使用a相电流在0.3~0.4 s的量测值拷贝信号替换c相电流量测值。上述场景的仿真结果如图6~图9所示。
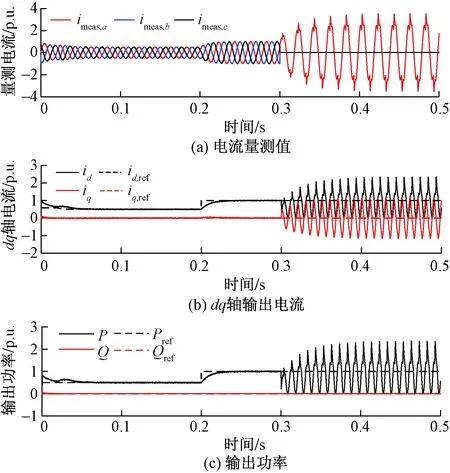
图6 CT数据缺失故障Fig.6 Loss data failure of CT
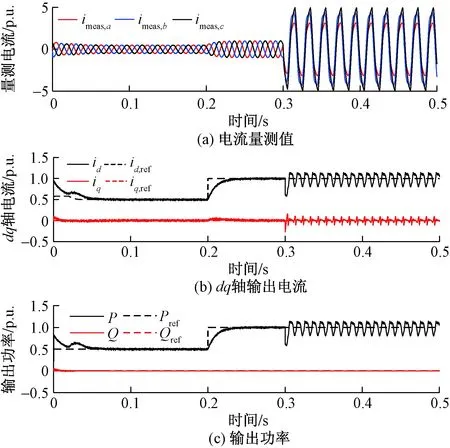
图7 CT数据采集故障Fig.7 Data collecting failure of CT
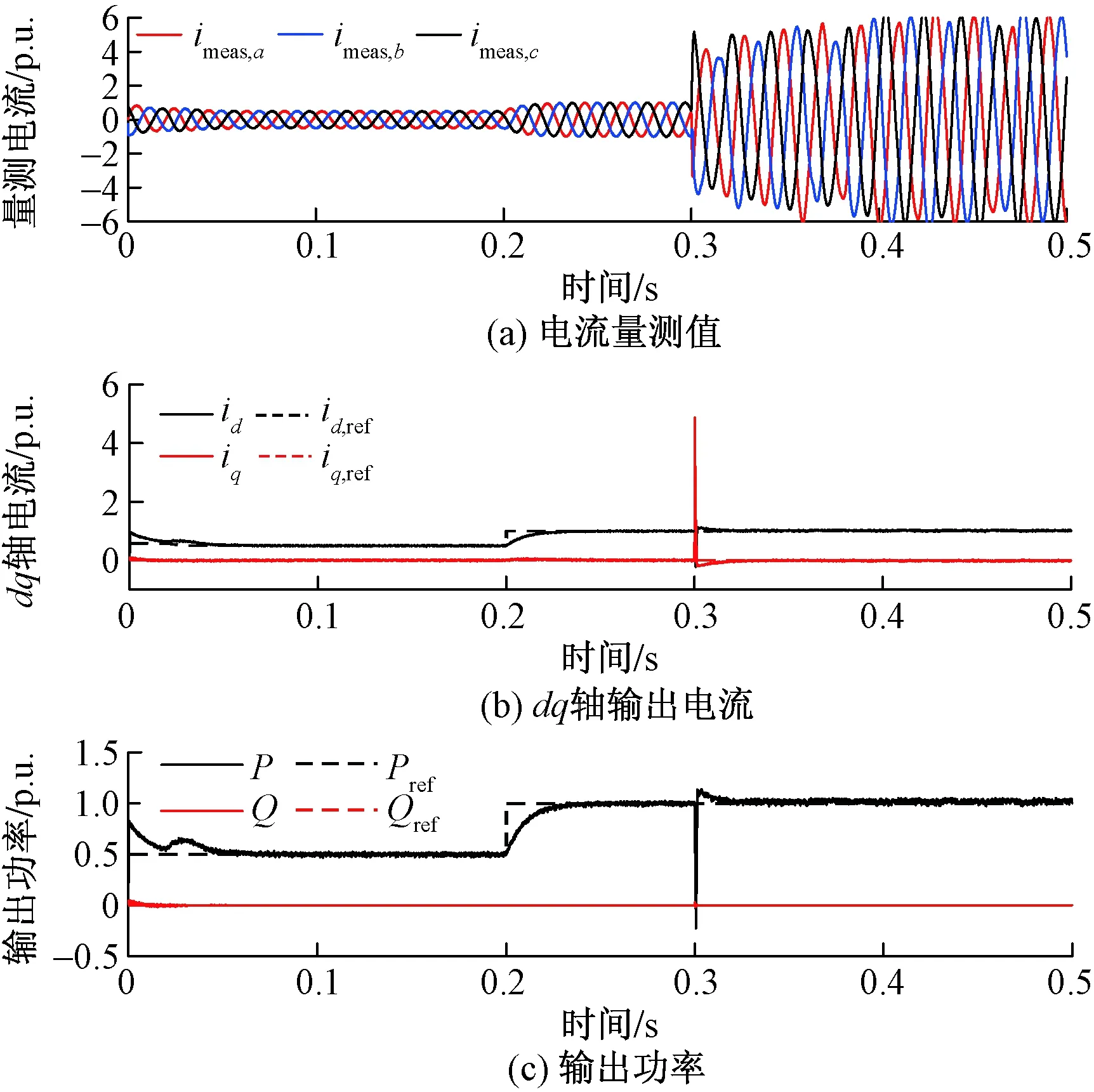
图8 斜坡攻击与随机攻击Fig.8 Slope attacks and random attack to CT
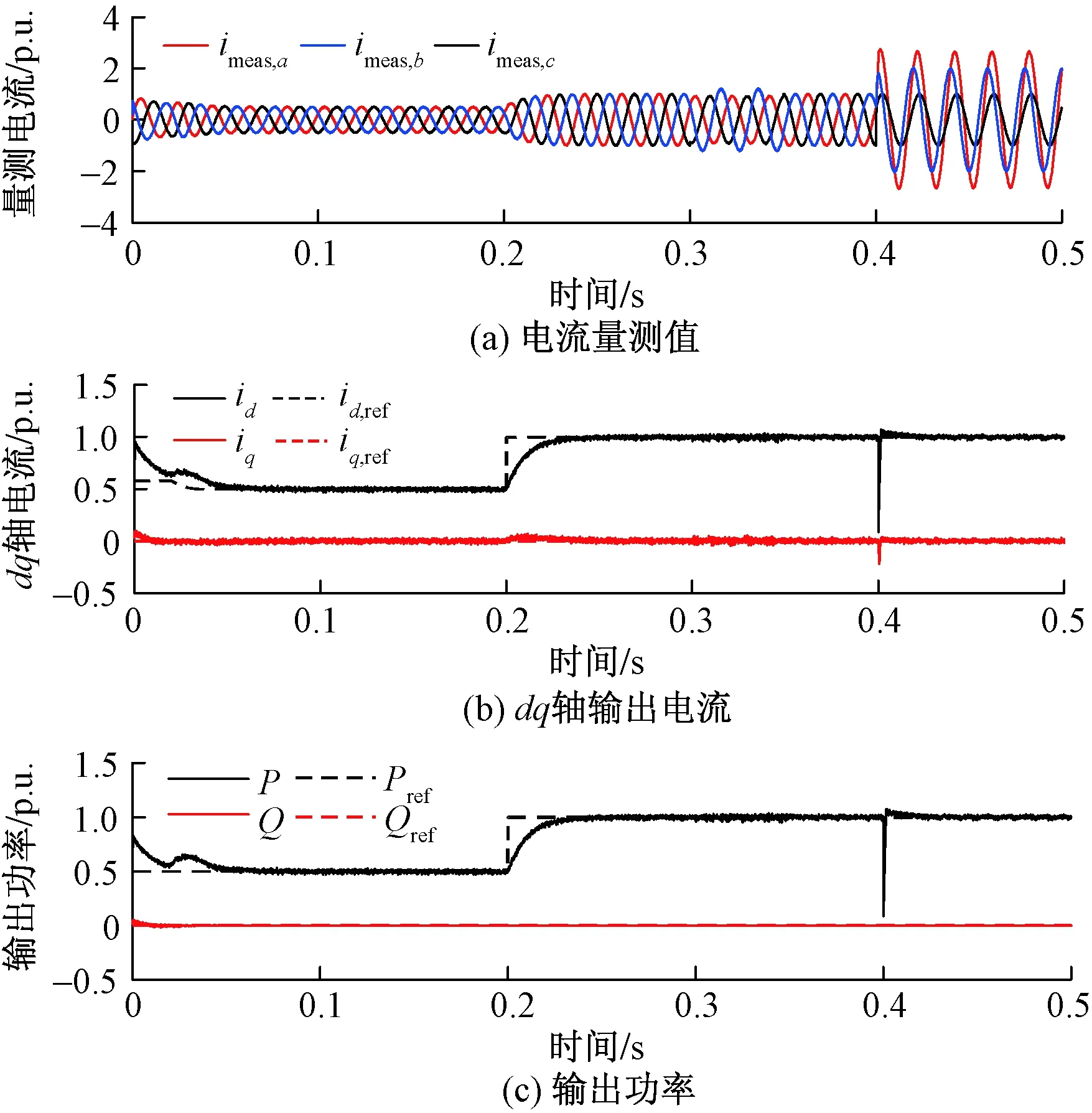
图9 尺度攻击与重放攻击Fig.9 Scaling attacks and replay attacks to CT
由仿真结果可知:在t=0.3 s前,微网处于稳定运行状态,电流输出反馈二次型最优控制器可确保dq轴电流快速稳定跟踪参考电流信号,从而使得微网的输出功率跟踪EMS系统下发的参考功率信号。t=0.3~0.5 s时间内,CT故障及FDIA均使得微网逆变器系统输出电流产生振荡与畸变,引起输出功率的剧烈变化,并向配网注入大量高次谐波。因此,CT故障及FDIA将导致原有的控制器失效,危害电网的安全稳定运行。
4.2 异常信号估计方法性能比较

图10 典型异常信号估计波形对比Fig.10 Comparison of typical abnormal signal estimations
从图10的仿真波形可以看出,常规模糊控制-SMO方法与本文方法均可有效抑制传统SMO存在的抖振,对异常信号的估计波形相对平滑。针对阶跃异常信号,本文方法上升时间更短、超调量更小;针对正弦异常信号,本文方法对异常信号的相位延迟较小,估计精度更高。基于模糊推理的论域伸缩因子可自适应调节论域的变化范围及滑模增益,从而提高观测器对异常电流量测信号的逼近性能,避免抖振所引起的高次谐波及估计精度不足对所提容错控制策略的负面影响,且模糊推理易于实现,便于工程应用。
4.3 容错控制策略验证
为验证提出的容错控制策略的有效性,针对4.1节中的典型CT故障及虚假数据注入攻击场景,采用所提的异常信号估计及电流补偿容错控制方法,得到异常信号的估计波形以及dq轴电流与功率波形分别如图11和图12所示。
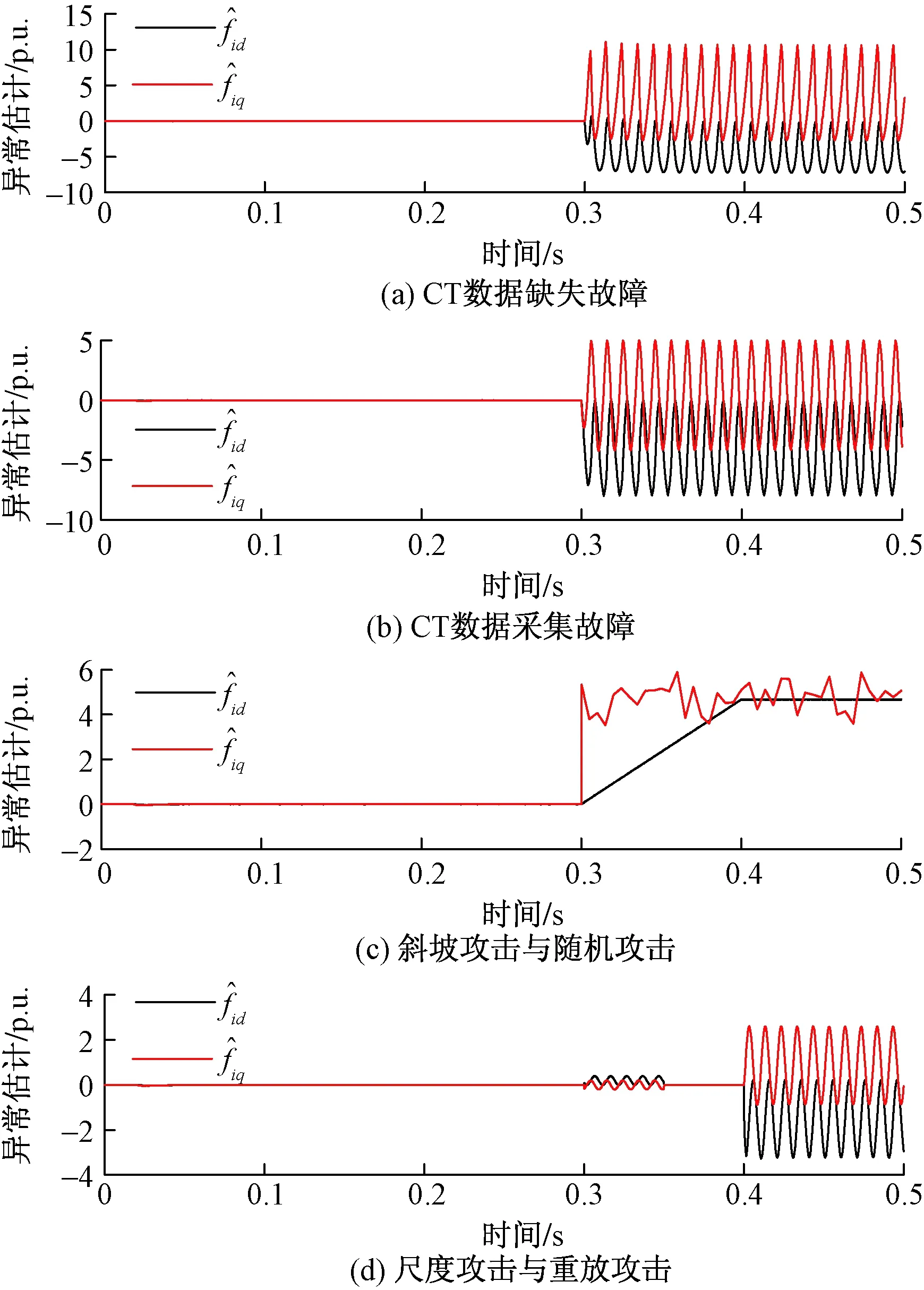
图11 微网典型CT故障及攻击场景异常量测信号估计Fig.11 Abnormal measurements estimation of typical CT failure and FDIA scenarios in microgrid

图12 本文容错控制策略下电流及功率跟踪结果Fig.12 Current and power tracking results under the proposed fault-tolerant control strategy
由图11的仿真波形分析可以得到,所设计的VUFC-SMO方法,可实现对多种场景下CT故障及攻击引起的异常信号的精确估计。由图12的仿真结果分析可知,在本文的容错控制策略作用下,使用异常信号的估计量对电流进行补偿,对多种场景均可实现dq轴电流对参考信号的有效跟踪,从而确保微网输出功率保持稳定。本文所提出的容错控制策略可确保微网逆变器系统在CT故障及FDIA下的安全可靠运行。
4.4 实验验证
为进一步对所提的异常量测信号估计与容错控制策略的有效性进行验证,搭建基于dSPACE 1103控制器的微网实验平台。DG由一输出电压为48 V的直流源进行模拟,经额定功率为250 W的逆变器、LC滤波器与模拟电网连接。设定DG的dq轴额定电流为id,ref=1 A、iq,ref=0 A。t=0.2~0.4 s时间段内,在dq轴电流量测信号中分别注入异常信号fid=sin100tA,fiq=0 A,实验结果如图13所示。
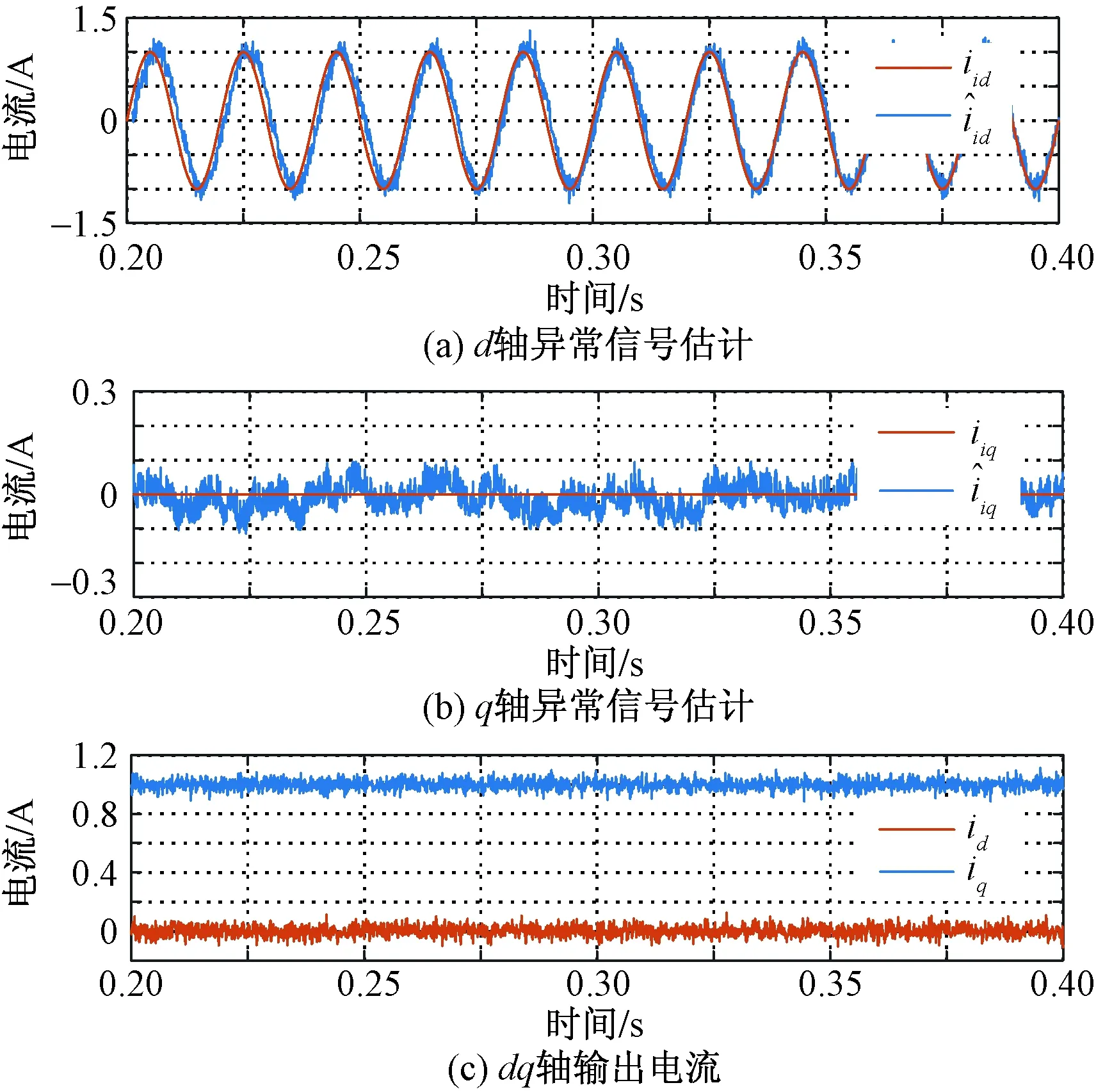
图13 实验验证结果Fig.13 Validation of experiments
由实验结果可知,本文基于VUFC-SMO的异常信号重构方法可以准确地估计出异常电流信号,且抖振较小。基于异常信号的估计量对电流信号进行补偿,所提容错控制策略可确保dq轴输出电流跟踪参考电流,从而验证了本文方法的可靠性。
5 结论
针对并网模式下微网逆变器系统电流互感器故障与虚假数据注入攻击问题,构建了基于输出反馈且考虑故障与攻击的微网模型,设计滑模观测器对异常信号进行估计并提出基于电流补偿的容错策略,采用变论域模糊控制提高滑模观测器对异常信号的估计精度,仿真及实验结果表明了本文方法在多种故障与攻击场景中的有效性。在后续研究中,可将传感器的乘性故障以及数据可用性攻击等攻击方式考虑进来,提高容错控制策略的适用范围。
猜你喜欢
大电机技术(2022年2期)2022-06-05
现代电力(2022年2期)2022-05-23
计算机仿真(2022年2期)2022-03-15
能源工程(2021年3期)2021-08-05
控制与信息技术(2021年2期)2021-07-23
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
计算机与数字工程(2019年8期)2019-09-03
电子制作(2019年11期)2019-07-04
北京航空航天大学学报(2017年4期)2017-11-23