基于剖面声呐的海底沙纹演变规律试验研究
2020-12-16 00:55彭子奇贾永刚田壮才单红仙
科学技术与工程 2020年31期
彭子奇, 贾永刚,2, 田壮才, 程 升, 单红仙,2*
(1.中国海洋大学环境科学与工程学院, 青岛 266100;2.中国海洋大学, 山东省海洋环境地质工程重点试验室, 青岛 266100)
海底沙纹是一种尺度比小型沙波更小,且脊线往往与流体流向垂直并具有一定韵律性的海底微地貌形态[1-2],是水底床面形态存在的最小尺度,波高一般为0.5~2 cm,最大不超过7.5 cm,断面形态一般呈三角形,其发育与迁移往往与地形、水动力条件和沉积物特性等因素息息相关[3],普遍发育于河口[4]、海峡[5]、海湾[6]、大陆坡[7]和全球潮流陆架[8]等海域。与平坦底床相比,沙纹会影响底床阻力,对底床演变和沉积物输运起着重要作用[9-10]。沙纹的发育可能会促进航道的淤积和管线的破坏,因此研究沙纹演变规律对港口、航运以及海岸带的防护具有重要意义[11-13]。
对海底沙纹的观测研究,最早始于1901年[14],兴起于20世纪90年代。目前,大多数关于沙纹的研究是基于光学摄影技术和声学测量技术,通过室内水槽试验和现场测量等方法进行的。程永舟等[15]基于CCD(charge coupled device)图像技术和ADV(acoustic doppler velocimeter)测量技术,通过水槽试验发现非线性波作用下沙纹的形成原因是底层漩涡结构的动力作用;许栋[16]基于光学摄影技术和地形扫描仪测量发现,沙纹形成过程是非线性的,从平床发育到沙纹雏形需要较长时间,当雏形形成后其发展速度会变得很快。但这些技术手段大多数只适用于室内试验或现场调查中的一种情况,且大都具有滞后性,很难实时获取数据。例如,光学摄影技术虽然适用于室内试验和现场调查,但对水体环境要求很高,实际测量时水体环境往往较浑浊,观测范围和精度十分有限;多波束测量技术虽然适用范围广,但很难实时获取数据而且只能用于现场调查;地形扫描仪测量技术往往只用于室内试验,是在试验结束后才进行工作,不能实时获取数据。为了解决这一问题,国外学者发明了剖面声呐观测手段,剖面声呐观测手段适用于室内试验和现场调查,数据精度能达到2 mm,并能实时获取数据,同时剖面声呐属于声学仪器范畴,对水体环境要求较低,即使在非常浑浊的水体中也能获得较好的数据。但中国关于剖面声呐观测方法仅有陈景东等[17]和马小川[18]有所研究,基于剖面声呐观测沙纹的研究还未见到。
基于大型波浪水槽试验,通过对剖面声呐数据与光学摄影数据进行对比来检验剖面声呐的数据准确性,验证了剖面声呐观测沙纹的可行性,扩展了中国的沙纹观测手段。并基于剖面声呐数据与光学摄影数据进一步研究了波浪作用下海底沙纹的演变规律。
1 试验材料与方法
1.1 试验装置和材料
试验在山东省海洋地质工程重点实验室(中国海洋大学)的大型波浪水槽中进行,试验的主体设备为波浪水槽,水槽长4 m、宽0.5 m、高1 m,左右两端配备有消浪装置,中部配有沙槽,尺寸为1 m(长)×0.5 m(宽)×0.3 m(高),一端配有推板式造波机,能产生规则波,如图1所示。
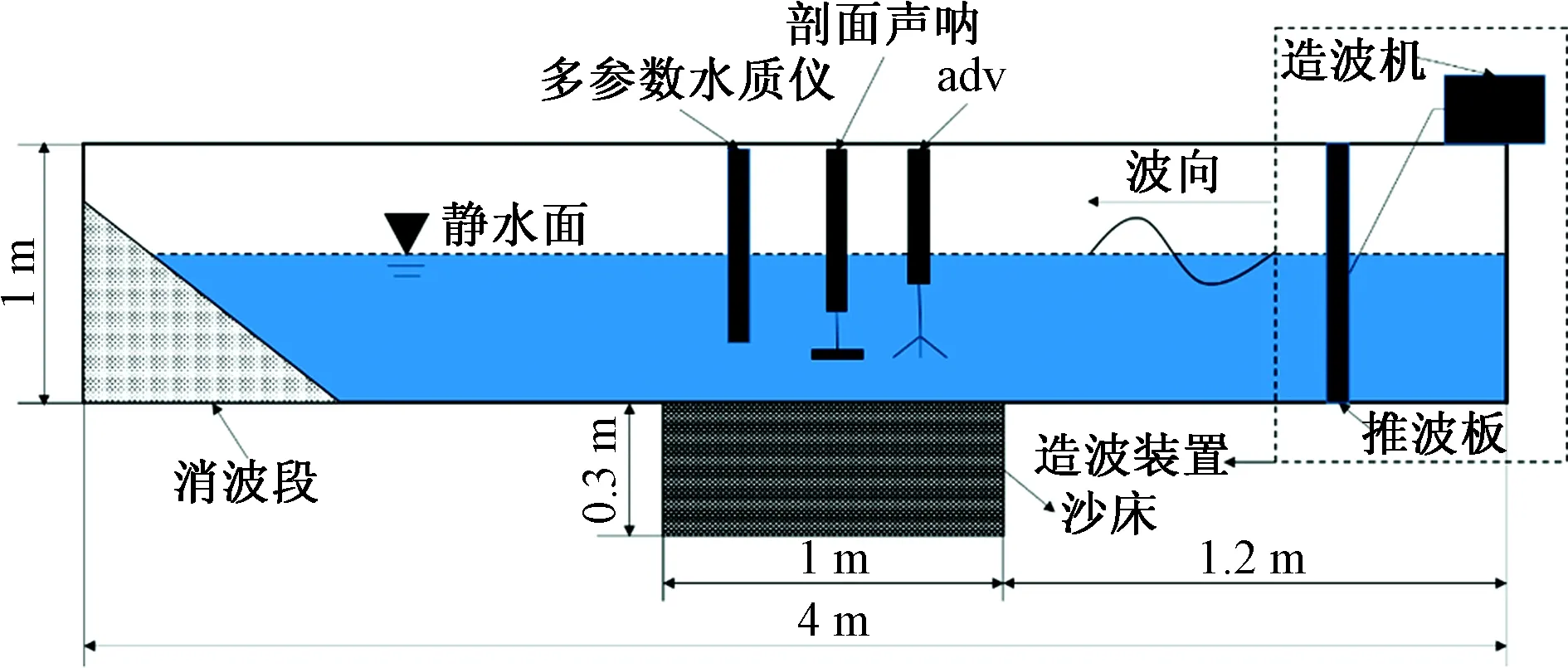
图1 波浪水槽示意图Fig.1 Sketch of wave flume
试验用砂取自青岛周边海域,为了能更好地产生沙纹,使用0.25 mm细筛筛除沙样中超过0.25 mm的颗粒,对试验沙样取样进行粒度分析,测得沙样中值粒径为183 μm,其中0.075 mm<粒径d<0.25 mm的颗粒所占比例为99.7%。
试验所用声呐为Imagenex 881A多频数字剖面声呐(Benthic SRP-Scan,新西兰),仪器精度为2 mm,主要用于测量水槽内沙纹的形态特征数据。该声呐是一款能实时记录水底地形地貌图像数据的仪器,由于光等在海水中的传输衰减较大,因而相对于光学等仪器而言,图像声呐能提供更加准确且更加完整的海底地形地貌数据。该剖面声呐的工作原理是通过探头发射声波信号,声波信号到达海底后反射回到换能器接收,回波信号经加工处理和计算,得到海底各点相对于换能器的位置, 以换能器位置为坐标原点,进而计算出海底各点的三维坐标。其工作模式分为直线测量和旋转测量(图2):直线测量时,一般选定平行于流向的一个剖面,实时测量剖面上各点的高程变化,进而在声呐配套软件中显示出测线上各点的高程变化,通过对数据的进一步处理能得到各个时刻海底剖面图像;旋转测量时,则是以一定的角度间隔(0.3°的倍数)进行一周的旋停测量(旋转到一个设置角度后停止旋转,测量该角度剖面数据后继续旋转直至测量完一周),能够获取测点附近一定范围内的地形地貌数据,一次旋转测量可以认为是多组不同角度的直线测量的集合。试验中两种工作模式均有采用,每隔1 min进行一次直线测量。试验中的水体流速由声学多普勒点式流速仪(ADV)测得,采用三相模式(x方向同水槽方向一致),每秒测量一次,采样频率64 Hz,固定于沙床正上方。
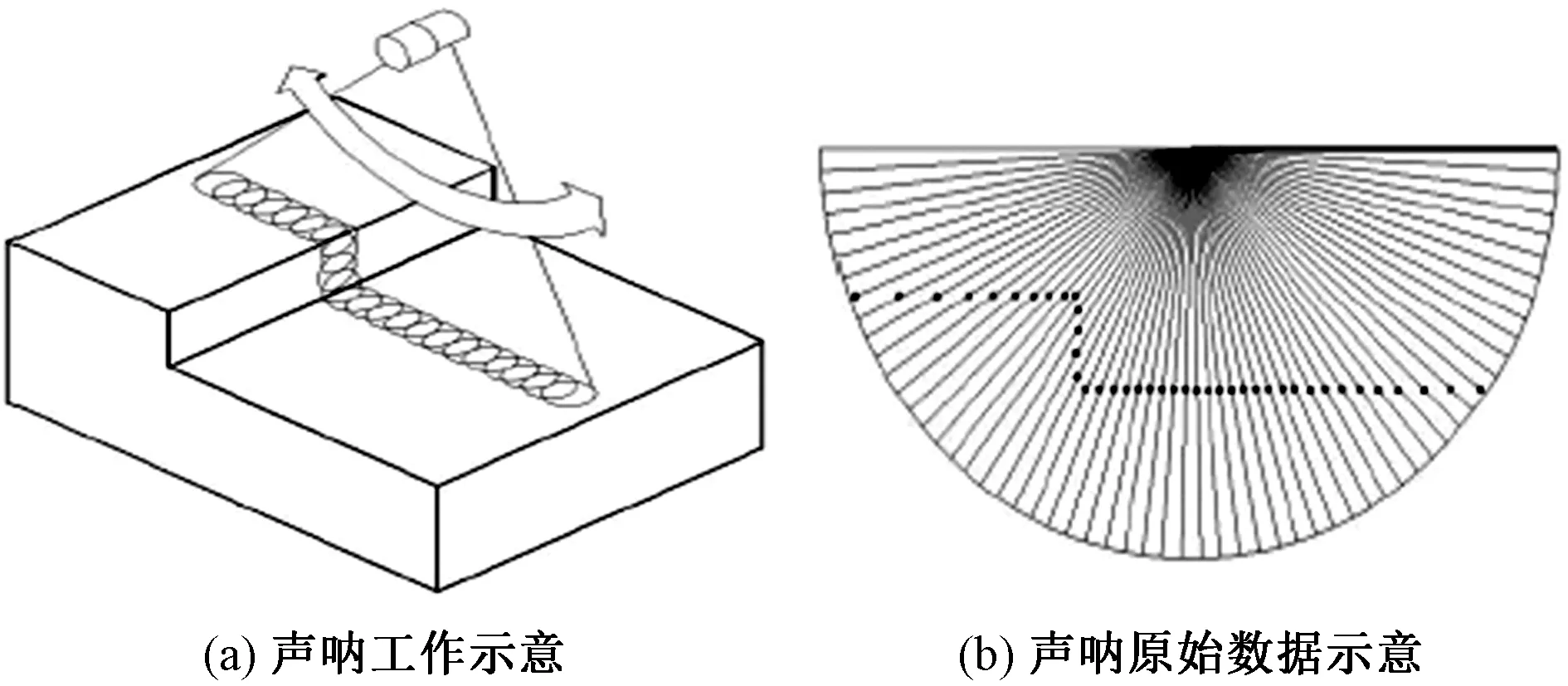
图2 剖面声呐工作示意图Fig.2 Schematic of profiling sonar work
水槽内波浪数据和浊度数据分别由波潮仪和RBRconcerto型多参数水质仪测定,波潮仪采样频率1 Hz,每秒测量一次,固定于沙床尾部上方,主要用于测量水槽中的波高和波周期等波浪参数;多参数水质仪采样频率1 Hz,每半秒测量一次,固定于沙床正上方,主要用于测量水槽内的浊度等参数。试验过程中,使用两个高速图像采集系统(CCD相机)测量海底沙纹形态特征,CCD相机的空间分辨率为1 920×1 080像素,频率为10 Hz,其中一个相机始终与水槽侧壁保持固定距离,另一相机则对试验现象进行拍照补充。
1.2 试验过程
对于由同一种成分组成的细沙沙床,施加不同的波浪条件[19],波浪载荷的物理参数如表1所示。波浪作用不仅会导致水槽内水体环境的变化,也会使沙床形态特征发生变化。因而,试验过程中主要观测悬浮泥沙浓度变化和沙床形态特征变化。

表1 波浪参数
不同波浪条件下,试验过程一致。①铺设沙床:向已筛分的试验沙中注入少量水,搅拌湿润后再装入沙槽,沙床铺设完毕后缓慢注水至水深35 cm。②布置仪器:将剖面声呐、波潮仪、ADV和多参数水质仪安装固定在水槽内。③测量初始沙床形态数据:试验开始前,使用剖面声呐进行直线测量和旋转测量以获取初始的沙床形态数据。④施加波浪条件:按照试验设计波高值5 cm和10 cm分别加载波浪载荷进行试验。⑤拍照记录:试验加波过程中,实时观察并记录沙床的形态特征变化。在沙纹出现后,在沙槽侧壁上用记号笔描绘出不同时刻的沙纹形态,并拍照记录沙纹形态特征随时间的发育情况。⑥试验结束后,首先使用声呐对沙床形态数据进行采集,随后在水槽末端和沙槽中每隔20 cm处均设置采样点,对表层沙样进行取样分析。
2 试验结果
2.1 悬浮泥沙浓度变化
波浪作用下两次试验的水体悬浮泥沙浓度随时间变化趋势如图3所示。在试验未开始前,两组试验的浊度均为15 mg/L左右。在5 cm波高波浪载荷作用下,悬浮泥沙浓度在10 min内快速上升至30 mg/L,随后略微下降至28 mg/L,在试验开始170 min后再次上升至30 mg/L并趋于稳定,试验结束后悬浮泥沙浓度缓慢降低。
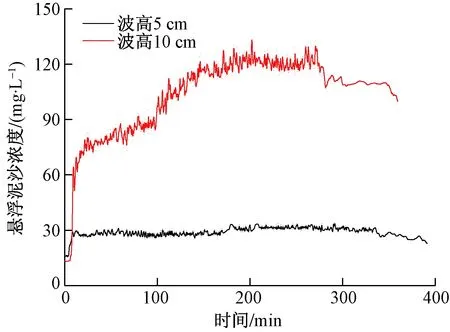
图3 波浪作用下水体悬浮泥沙浓度变化曲线Fig.3 Curves of suspended sediment concentration under waves
在10 cm波高波浪载荷作用下,悬浮泥沙浓度首先快速上升至75 mg/L,随后增速减缓,试验开始105 min后上升至90 mg/L发生跳跃,该时刻造波装置发生故障停止了约1 min,随后悬浮泥沙浓度以约0.3 mg/(L·min)的增速继续增长,当悬浮泥沙浓度增至120 mg/L时趋于稳定,试验结束后,悬浮泥沙浓度缓慢降低。
通过对两次试验悬浮泥沙数据的比较,可以看出10 cm波高试验组的悬浮泥沙浓度普遍高于5 cm波高试验组,最大悬浮泥沙浓度差约为90 mg/L。这主要是由于10 cm波高波浪载荷作用会对沙床产生更大的剪切力,进而导致更多的泥沙颗粒起动并进入水体。在试验结束后的静水沉降过程中,两组试验的悬浮泥沙浓度降低趋势有所不同,10 cm波高试验组悬浮泥沙浓度总体降低趋势更快。这主要是由于10 cm波高波浪载荷作用下水体中含有更多的粗颗粒泥沙,而粗颗粒泥沙在静水沉降时自重力要大于细颗粒泥沙,静水沉降速度相对较快。
2.2 底床形态特征
2.2.1 底床侵蚀淤积情况
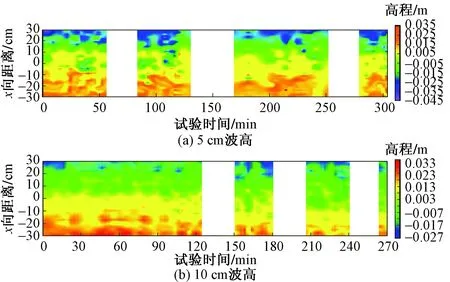
图4 底床随时间变化图Fig.4 Bottom bed change trend chart
波浪作用下沙床高程随时间变化趋势如图4所示(仅截取了0.6 m的沙床进行研究),x轴零点即对应声呐在测线上的位置,x轴正方向为沙床前侧,色标零点为设定的水底底面,白色区域为旋转测量时段。在5 cm波高波浪作用下,由于波浪作用较小使得底床变化不明显。在试验前110 min内,在-30~-10 cm区域(前部)沙床高程略微增长,在-10~10 cm区域(中部)沙床各部分变化趋势不一致,在10~30 cm区域(尾部)沙床被侵蚀了约0.5 cm,随后沙床各部分无明显变化趋势,试验前后沙床各部分总体约被侵蚀了0.5 cm。
在10 cm波高作用下,试验前90 min内,沙床各部分变化不明显,随后沙床整体被侵蚀,高程持续降低,试验开始210 min后,沙床前部和中部趋于稳定,无明显变化趋势,试验开始230 min后沙床尾部趋于稳定,试验前后沙床整体被侵蚀了约1.5 cm。
通过对两次试验数据的比较,可以看出在波浪作用下沙床均被侵蚀。这主要是由于波浪作用会对沙床产生剪切力,当超过泥沙起动临界切应力时沙床上的泥沙颗粒会起动,一部分泥沙颗粒会转变为悬移质进入水体环境,另一部分会转变为推移质,从而导致沙床高程降低。但由于波浪条件不同,波浪作用越强起动的泥沙颗粒越多,两组试验沙床高程变化有所不同。
2.2.2 沙纹形成过程
试验开始前,沙床平整[如图5(a)]。当施加波浪荷载后,会在床面产生剪切应力。当剪切应力超过泥沙临界起动值时,泥沙起动形成沙纹。首先,沙床会形成一些小的侵蚀凹坑,随着时间的增加,沙床会缓慢形成规则的沙纹雏形,随后沙纹雏形快速发育为弯曲沙纹[如图5(b)]。随着沙纹的运动,部分弯曲沙纹会发生交叉形成交叉沙纹(X型沙纹和Y型沙纹)[如图5(c)]。随着时间的进一步增加,沙床和波浪作用达到一个准静态平衡状态,形成了顺直沙纹[如图5(d)],沙纹形态趋于稳定变化十分缓慢。
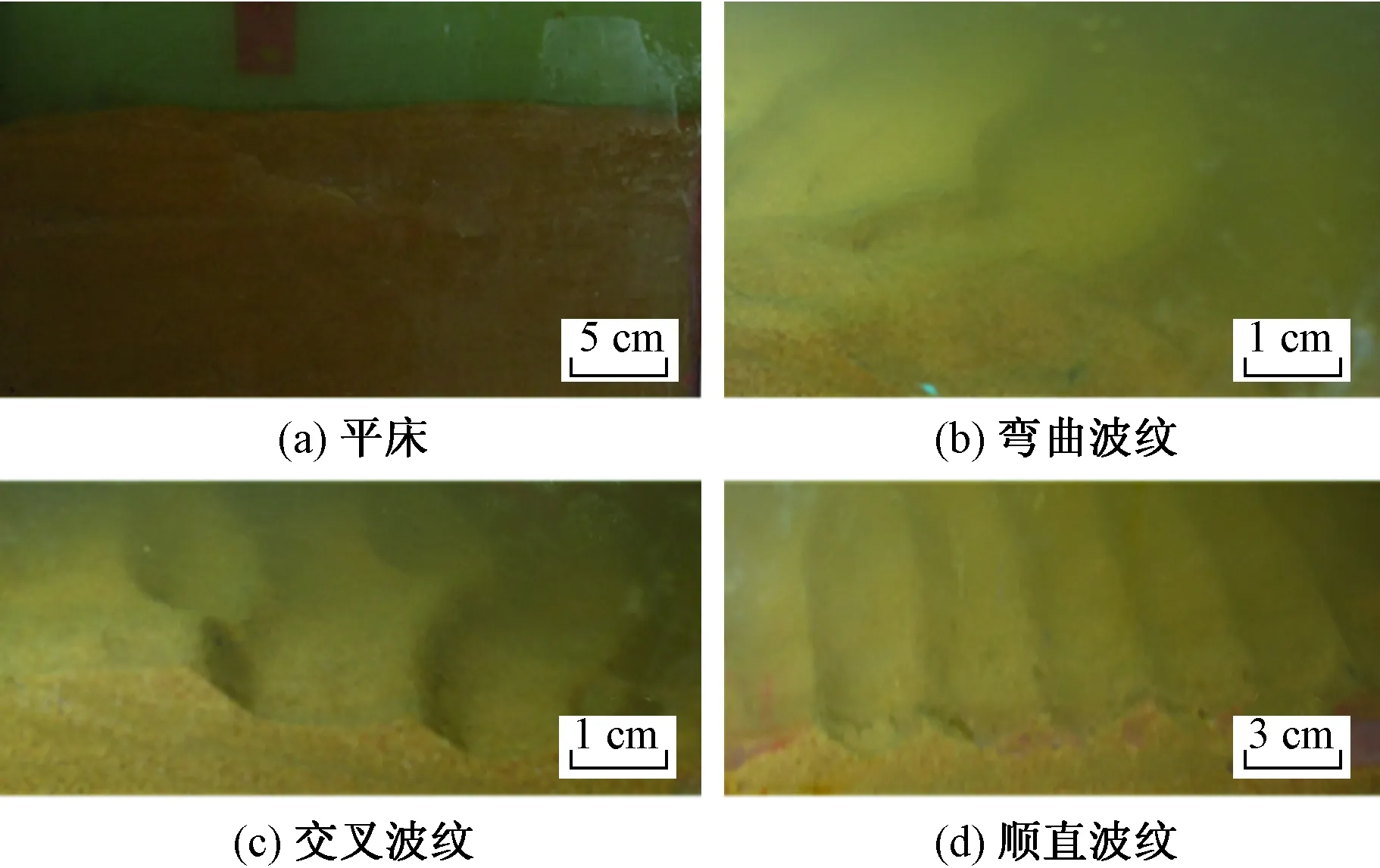
图5 试验沙纹形态实物图Fig.5 Physical map of wave ripples
3 分析与讨论
为了验证剖面声呐观测沙纹的可行性,基于图4中的剖面声呐数据,截取了沙纹发育为顺直沙纹后的部分声呐数据,对声呐数据和实际照片进行了对比分析,结果如图6和图7所示。

声呐位于实物图中20 cm刻度处,即声呐数据图横坐标零点对应实物图中20 cm刻度处图6 5 cm波高底床形态图Fig.6 Bed morphology with 5 cm wave height
在5 cm波高波浪作用下,试验进行到179 min时,声呐测量到了5个完整的沙纹,通过对5个波纹的统计分析得到波纹的平均波脊间距约为35 mm,波高约为6 mm,通过对实物照片分析可以得出,在标尺20~40 cm段有5个完整沙纹,根据图像得到的波纹的平均波脊间距约为33 mm,波高约为7 mm,声呐数据得到的沙纹数量和形态特征与实际情况基本一致,平均波脊间距误差为2 mm,波高误差为1 mm,在仪器2 mm误差范围内。试验进行到239 min时,声呐测量到了6个完整的沙纹,计算得到波纹的平均波脊间距约为30 mm,波高约为6 mm,通过对实物照片分析可以得出,存在有6个完整沙纹,平均波脊间距约为32 mm,波高约为6 mm,声呐数据得到的沙纹数量和平均波脊间距尺寸与实际情况基本一致,平均波脊间距误差为2 mm, 在仪器2 mm误差范围内;试验进行到299 min时,声呐测量到了4个完整的沙纹和2个不完整沙纹,计算得到波纹的平均波脊间距约为35 mm,波高约为6 mm,通过对实物照片分析可以得出,存在有5个完整沙纹和1个不完整沙纹,波纹的平均波脊间距约为32 mm,波高约为7 mm,声呐数据得到的沙纹数量和尺寸与实际情况有一定误差,平均波脊间距误差为3 mm,波高误差为1 mm,这主要是由于声呐数据反演的沙纹形态是通过数据点拟合而成,这使得部分沙纹的水平位置和形态数据存在一定偏差。
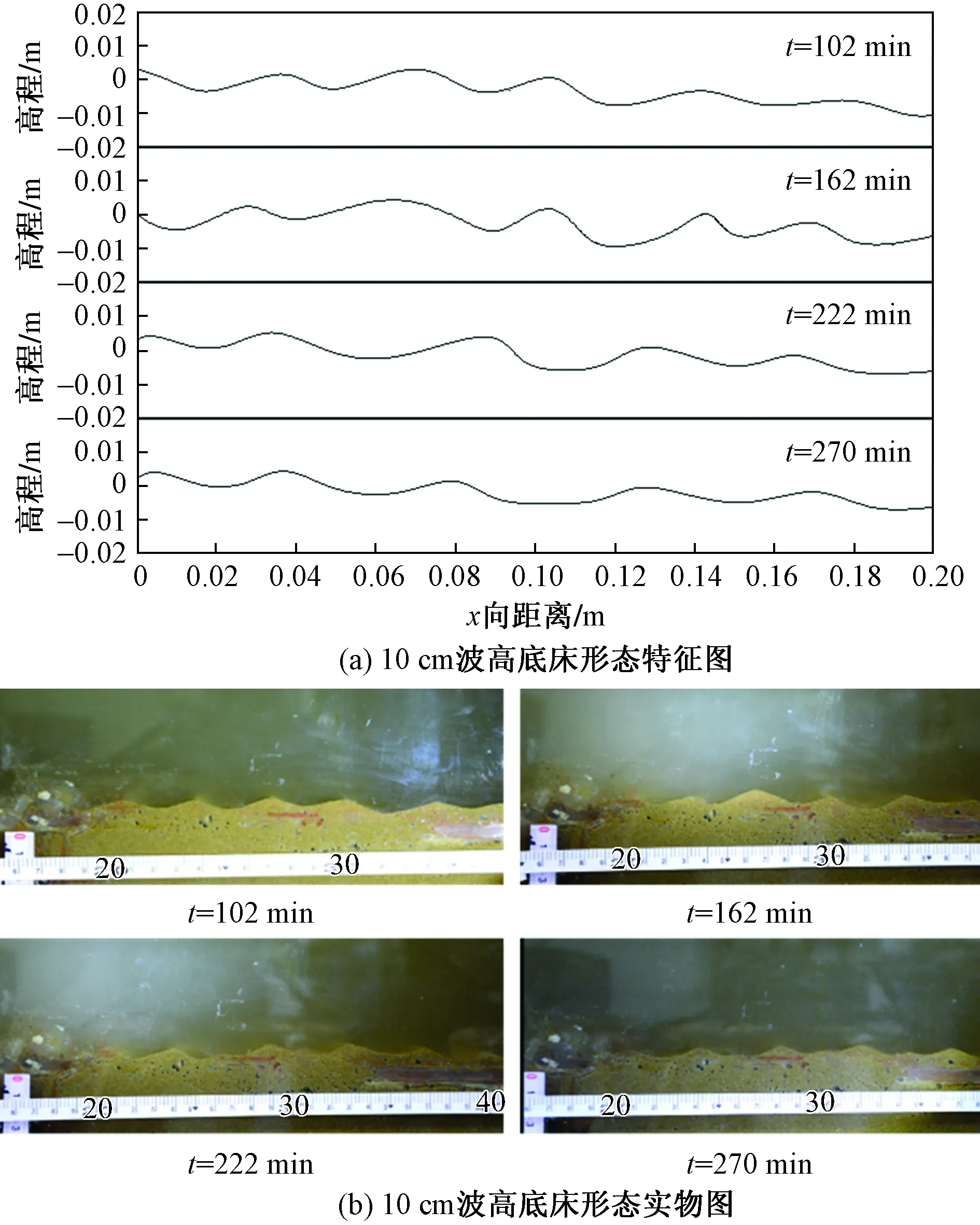
声呐位于实物图中20 cm刻度处,即声呐数据图横坐标零点对应实物图中20 cm刻度处图7 10 cm波高底床形态图Fig.7 Bed morphology with 10 cm wave height
在10 cm波高波浪作用下,试验进行到102 min时,声呐测量到了5个完整的沙纹,通过对5个波纹的统计分析得到波纹的平均波脊间距约为36 mm,波高约为6 mm,通过对实物照片分析可以得出,在标尺20~40 cm段有5个完整沙纹,根据图像得到的波纹的平均波脊间距约为37 mm,波高约为8 mm,声呐数据得到的沙纹数量和尺寸与实际情况基本一致,平均波脊间距误差为1 mm,波高误差为2 mm,在仪器2 mm误差范围内;试验进行到162 min时,声呐测量到了5个完整的沙纹,计算得到波纹的平均波脊间距约为36 mm,波高约为7 mm,通过对实物照片分析可以得出,存在有5个完整沙纹,波纹的平均波脊间距约为35 mm,波高约为10 mm,声呐数据得到的沙纹数量和尺寸与实际情况基本一致,平均波脊间距误差为1 mm,波高误差为3 mm;试验进行到222 min时,声呐测量到了4个完整的沙纹,计算得到波纹的平均波脊间距约为42 mm,波高约为7 mm,通过对实物照片分析可以得出,存在有4个完整沙纹,波纹的平均波脊间距约为42 mm,波高约为9 mm,声呐数据得到的沙纹数量和尺寸与实际情况基本一致,波高误差为2 mm;试验进行到270 min时,声呐测量到了4个完整的沙纹,计算得到波纹的平均波脊间距约为42 m,波高约为7 mm,通过对实物照片分析可以得出,存在有4个完整沙纹,波纹的平均波脊间距约为42 mm,波高约为8 mm,声呐数据得到的沙纹数量和尺寸与实际情况基本一致,波高误差为1 mm。
4 结论
基于水槽试验,通过对比剖面声呐数据与光学摄影数据来验证了剖面声呐研究观测沙纹的可行性,并基于剖面声呐数据与光学摄影数据研究了波浪作用下沙纹的演变规律,得出如下结论。
(1)通过对两组试验数据的分析,可以认为剖面声呐近底观测沙纹是可行的,声呐数据能够较好地反演出沙纹的波脊间距和波高等形态特征和位置信息。但由于声呐数据反演沙纹形态是通过数据点的拟合来实现的,声呐数据会存在3 mm的误差(仪器误差2 mm)。
(2)在5 cm波高和10 cm波高波浪作用下,沙纹在发育过程中会依次经历不规则沙纹—弯曲沙纹—交叉沙纹—顺直沙纹四个过程,当波浪作用与沙床达到准静态平衡状态时,沙纹会趋于稳定,变化十分缓慢。沙纹在发育过程中其波脊间距不超过4.5 cm,其波高为0.5~1.5 cm。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
舰船科学技术(2022年11期)2022-07-15
学苑创造·A版(2022年4期)2022-06-18
水运工程(2020年12期)2020-12-23
阅读与作文(小学高年级版)(2020年3期)2020-03-02
当代陕西(2020年24期)2020-02-01
海军航空大学学报(2019年1期)2019-04-29
土木建筑与环境工程(2019年6期)2019-02-02
水能经济(2017年6期)2017-10-19