多自由度码垛机器人结构设计及运动学研究
2020-12-23 08:47蒙重宝
黑龙江科学 2020年24期
蒙重宝
(广西理工职业技术学院,广西 崇左 532200)
0 引言
目前,工业生产线上一般使用码垛机器人进行搬运、码垛、拆垛等任务。由于码垛机器人具有动作灵敏准确、运行效率高、稳定性强等优势,正在逐渐取代人工码垛。但码垛机器人的成本较高,还难以大规模普及[1]。为了降低购买及维护成本,提高国内工业生产自动化水平,提高生产效率的同时降低生产成本,必须对码垛机器人的结构设计及运动学进行研究[2]。设计了一种多自由度码垛机器人结构,并对其运动学进行了分析。其具有结构简单、运行可靠的特点,适合产量不大的中小企业使用。
1 多自由度码垛机器人结构设计
设计具有多自由度的码垛机器人结构,需要分析其结构参数,并依据设计的结构参数构建码垛机器人的主体结构,为其运动学分析提供基础。
1.1 多自由度码垛机器人结构参数设计
为了使码垛机器人能自主完成码垛的所有操作工序,精准完成抓取或放下产品的动作,并能将产品从抓取点运送到码垛点,完全模仿人工码垛的动作,需要机器人本体可以自由灵活运动,具有自主码垛的基本功能[3],主要的技术参数包括运行速度、自由度、工作空间范围、末端承载能力以及重复定位精度等。本研究设计的码垛机器人具有4自由度的关节分布,臂展为1.8 m。码垛机器人结构参数如表1所示。
1.2 多自由度码垛机器人结构主体设计
多自由度码垛机器人结构主体设计极为重要。为了保证机器人在工作时准确抓取,动作平稳,设计了多自由度码垛机器人,结构主体采用优于其他结构机器人的4自由度关节式结构形式,如图1所示。该结构要求在搬运过程机器人腕部处于水平状态,以搬运物体为例,其具有两个平行四边形机构和一个三运动副杆组机构,利用末端执行器来控制物流箱,利用主臂、前臂、后臂及底座部的特殊四边形机构配合将物流箱搬到一定位置。

表1 码垛机器人的主要技术参数Tab.1 Main technical parameters of Robot Palletizer

图1 码垛机器人结构示意图Fig.1 Structural representation of Robot Palletizer
2 多自由度码垛机器人运动学分析
根据设计的机器人结构,将多自由度码垛机器人带入到坐标系中,以A点为坐标原点,分析研究机器人末端端点的运动学变化[4]。示意图中不同位置的坐标点为:
A点位置坐标为:
L(xA,yA)=(0,0)
(1)
B点位置坐标为:
L(xB,yB)=(lABcosθ,lABsinθ)
(2)
其中,l表示不同坐标点之间的距离,θ表示AB线与x轴正向坐标轴之间的夹角。
C点位置坐标为:
L(xC,yC)=(xB-lBCsinϑ,yB+lBCcosϑ)
(3)
其中,ϑ为BC线与y轴正向坐标轴之间的夹角。
D点位置坐标为:
L(xD,yD)=(-260,260)
(4)
E点位置坐标为:
L(xE,yE)=(xC-lECcos(π-β),yC+lECsin(π-β))
(5)
其中,β为DF与x轴正向坐标轴之间的夹角。
F点位置坐标为:
L(xF,yF)=(xD-lDFcos(π-β),yD+lDFsin(π-β))
(6)
固定:
(7)
由此得到机器人末端端点G点位置坐标为:
(8)
在以上分析基础上可知,码垛机器人末端G点的位置主要受F和E点影响,而C点的位置受到ϑ角的影响,故设计机器人过程中,固定各个结构之间距离,通过调整旋转角度ϑ和β可实现G点的位置控制。
3 码垛机器人运动学分析及仿真
3.1 码垛机器人运动学分析
对码垛机器人设定4个自由度,即包含4个关节变量,分别为是θ1、θ2、θ3和θ4。设计的码垛机器人运动学简图如图2所示。
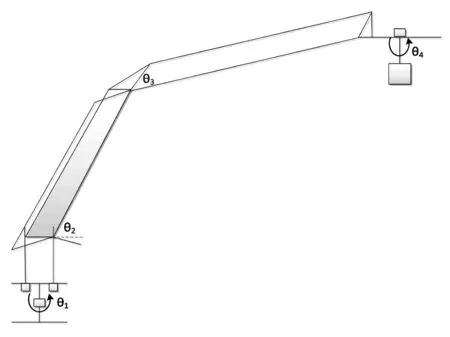
图2 码垛机器人运动学简图Fig.2 Kinematics diagram of of Robot Palletizer
为了得到机器人的运动空间,需要了解每个关节变化量的范围。其中,旋转关节的变量为关节变量θ1、θ4。同时,为了最大限度保证其运动范围,取值范围为:1-π ≤θ≤π,θ2和θ3随着两个旋转关节的运动而变化。
3.2 码垛机器人的动力学仿真
在ADAMS软件中对机器人各个关节的驱动力矩进行仿真计算,让机器人完成物品抓取并返回原位置的工作,因此每个关节变量的负载情况是变化的。0~1 s代表机器人正在调整位置,准备抓取物品;1~5 s代表机器人在转移物品;5~7s代表机器人放下物品,返回初始位置。得到每个关节变量的力矩变化曲线图。
从图3~6中可以看出,关节变量θ1的最大驱动力矩为8 000 N·m,关节变量θ2、θ3、θ4的最大驱动力矩分别为6 500 N·m、2 500 N·m及900 N·m。曲线特性是在机器人调整位置并准备抓取物品的过程中逐渐增大其驱动力矩,使其在1 s时达到最大,之后,机器人匀速转移物品,力矩较小且其变化程度低。在放下物品回到初始位置过程中,从5 s开始,驱动力矩逐渐增大,在10 s时达到最大值,这是由于减速过程中,电机力矩会变大。通过对各个关节变量的力矩曲线分析,验证了动力学理论的正确性,并能够得出每个关节变量所受的约束力。

图3 关节变量θ1力矩变化曲线Fig.3 Curve of joint variable θ1 moment of force
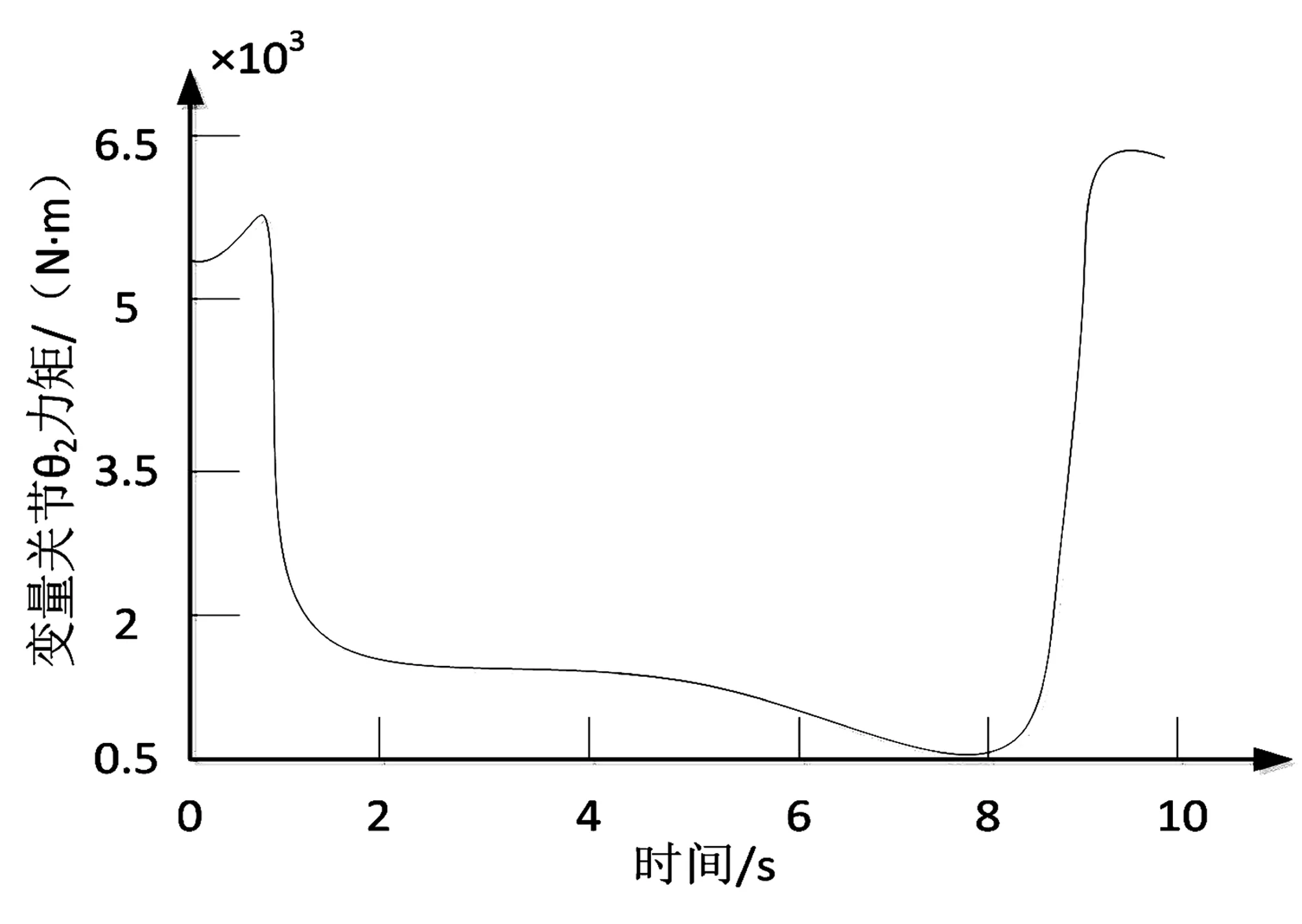
图4 关节变量θ2力矩变化曲线Fig.4 Curve of joint variable θ2 moment of force

图5 关节变量θ3力矩变化曲线Fig.5 Curve of joint variable θ3 moment of force
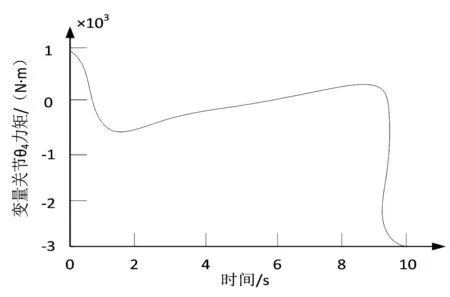
图6 关节变量θ4力矩变化曲线Fig.6 Curve of joint variable θ4 moment of force
4 结语
通过码垛机器人运动学仿真,得到码垛机器人的运动学方程,以证明可以在参考坐标系中准确表现机器人各零件的位姿,且码垛机器人可以到达目标位置和位姿,满足了运动学要求。
通过码垛机器人动力学仿真,对各关节变量的力矩曲线进行分析,以证明动力学理论的正确性,并能够得出每个关节变量所受的约束力,所设计的机器人符合动力学。
猜你喜欢
橡塑技术与装备(2022年11期)2022-11-08
中国特种设备安全(2022年2期)2022-07-08
现代制造技术与装备(2022年1期)2022-02-21
电子制作(2019年20期)2019-12-04
电子制作(2019年15期)2019-08-27
重型机械(2019年3期)2019-08-27
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
海军航空大学学报(2015年1期)2015-11-11