
并联式混合动力汽车模糊控制策略优化
2020-12-25 12:31黄禀通朱建军周忠伟陈登攀
机械设计与制造 2020年12期
黄禀通,朱建军,周忠伟,陈登攀
(太原理工大学机械与运载工程学院,山西 太原 030024)
1 引言
并联式混合动力电动汽车可应对不同运行工况的需求,调配整车各动力源之间的能量流分布[1]。如何实现综合优化的经济和排放性能的能量管理策略是针对并联式驱动系统的研究热点。
在实际问题中,并联式驱动系统结构及控制形式较为复杂,存在大量的复杂因素,难以用数学模型精确描述。模糊控制具有较强的鲁棒性及实时性[2],将模糊控制与并联式驱动策略相结合,可以有效提升整车性能[3]。
模糊控制器隶属度及模糊规则的制定主要依赖于操作者的经验,具有一定局限性,因此需要对模糊控制进行优化以保证控制效果。作为高效的全局性搜索算法,遗传算法被广泛应用于复杂非线性系统。文献[4-6]分别以装备超级电容的分离轴式、双轴并联式、单轴并联式混动汽车为原型,将遗传算法应用于模糊隶属度的优化之中并在ECE 及NEDC 工况下进行验证,得出优化后的模糊控制可以进一步提升驱动系统性能,改善整车燃油经济性及动力性。文献[7-8]分别以并联式PHEV 和差速耦合混动汽车为模型优化模糊规则,并于UDDS 工况下验证了优化后模糊控制器的有效性。上述文献均采用遗传算法对并联式混动汽车隶属度函数或模糊规则进行优化,未曾考虑动力系统参数对并联式整车性能的影响。
为进一步提升模糊控制能量管理策略性能,以某并联式混合动力汽车为原型,在MATLAB/Simulink 平台建立了一种三输入单输出的模糊驱动控制器,并利用遗传算法实现模糊规则及整车动力性参数的优化,最后在HIL(Hardware-in-the-loop)测试平台下验证了优化策略的有效性。
2 模糊逻辑转矩控制策略设计
2.1 并联式混动汽车结构
单轴并联式系统动力总成,如图1 所示。主要包括:发动机、ISG 电机、动力电池组、动力传动装置及控制系统。HCU(整车控制器)通过控制EMS(发动机管理系统)、MCU(电机控制系统)、BMS(电机管理系统)、TCU(变速器管理系统)决定各部件工作模式及工作状态。离合器分离时,电机通过变速箱传递动力独立驱动,离合器接合时,电机与发动机共同驱动车辆行驶,制动时电机作为发电机为动力电池组充电。其动力系统的基本参数,如表1 所示。

图1 并联式混合动力汽车结构Fig.1 Configuration of the Hybrid Vehicle

表1 整车主要部件参数Tab.1 Main Component Parameters of the Vehicle
2.2 模糊控制器的设计
并联式混合动力汽车存在多动力源能量流协调的问题,利用模糊逻辑理论制定驱动策略,使发动机尽可能在良好运行工况下工作,以实现需求功率在多个动力源之间的合理分配,模糊控制策略的工作原理,如图2 所示。
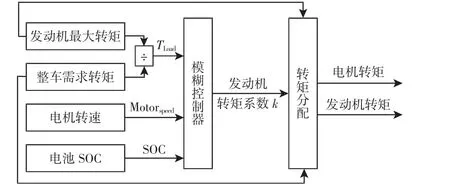
图2 模糊控制策略工作原理Fig.2 The Principle of Fuzzy Control Strategy
模糊控制规则的制定直接关乎模糊控制器性能的优劣,搭建模糊控制器遵循的准则为:(1)若整车需求转矩较小且电池组SOC 处于中高水平时,由电机单独驱动车辆行驶。若此时SOC 水平较低,则由发动机驱动汽车行驶,同时带动电机发电,为动力电池组进行充电以维持电量平衡。(2)若整车需求扭矩偏小且SOC水平较高时,则仅由发动机驱动以避免电池过充,若SOC 水平较低,则发动机利用驱动车辆外的富余转矩通过电机向动力电池组充电。(3)若整车需求转矩偏大,则由发动机单独驱动以保证发动机在高效区工作,若SOC 水平较低,则发动机参与发电以保证电池荷电状态平衡。(4)若整车需求转矩较大,则由发动机和电机联合工作为整车提供驱动力,若此时SOC 水平偏低,则电机适当减小动力输出以避免动力电池组的过放损害。
模糊转矩控制器的3 个输入变量分别为整车需求转矩与当前转速下发动机最大转矩的比值Tload,电机转速Motorspeed及电池的SOC 值,1 个输出变量为发动机转矩系数k[9],如图3 所示。输入输出量隶属度函数形状设定为梯形,Tload模糊子集定义为{HX,X,Z,D,HD};电池SOC 的模糊子集定义为{D,ZD,ZS,G};电机转速Motorspeed的模糊子集定义为{D,Z,G};输出量k 的模糊子集定义为{HX,X,ZD,D}。在分别确定输入及输出量的模糊子集及隶属度函数后,制定出模糊控制规则查询表,模糊控制器曲面观测图,如图4 所示。

图3 输入输出变量隶属度函数Fig.3 Membership Functions of Input and Output Variables

图4 模糊控制器曲面观测图Fig.4 Surface Observation Map of Fuzzy Controller
3 基于遗传算法的控制策略优化
3.1 待优参数的选取
并联式系统控制策略优化时不仅应考虑模糊规则的影响,还应考虑动力匹配参数的耦合效果,采用遗传算法对两者同时优化。
3.1.1 能量管理策略参数
采用全局性优化算法对驱动模糊控制器的隶属度及规则函数一同优化,存在计算维度大、过早收敛等问题,因此仅对模糊规则进行优化。相对于二进制编码方式,十进制代码编码长度大幅缩短,计算效率显著提升,因此采用十进制编码[10-11]。基于模糊规则的完备性和一致性,将输出变量k 的模糊子集{HX,X,ZD,D}分别编码为1,2,3,4。以Motorspeed=D 为例进行分析,规则对应编码为3211,3221,3332,4432,4432,如表2 所示。

表2 模糊控制规则Tab.2 The Fuzzy Control Rules
3.1.2 动力系统参数的选择
整车性能受较多动力系统参数的影响,全部参数优化并不现实,选取对整车性能影响较大的主减速器速比i0及纯电动工作模式行驶车速阈值Vl作为目标优化量[12]。
3.2 遗传算法流程
以模糊控制规则及动力系统参数为优化对象,考虑整车经济性和排放性建立优化目标函数。优化具体流程如下:
(1)输入混联式混合动力汽车发动机、电机、电池组、传动系、驾驶员模块等基本参数并搭建模糊驱动控制策略;
(2)设定系统优化目标函数,确立目标函数中的各项权重系数。
(3)将遗传算法嵌入到混动汽车控制策略模型之中,创建种群,计算适应度并排序选取其中适应度高的100 个个体作为初始种群。
(4)父代种群代入整车模型计算个体适应度值,等级排序后经过选择、交叉变异运算生成子代种群。
(5)判断新种群是否满足终止条件,满足即执行终止程序,解码得到目标空间中的参数最优解,并输出优化结果,否则返回第4 步。
优化流程,如图5 所示。
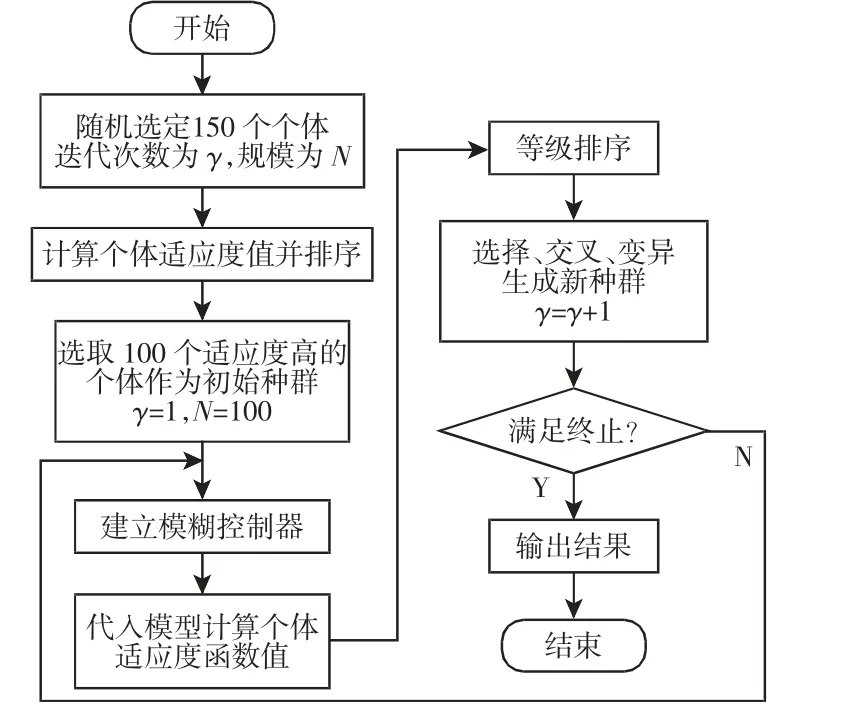
图5 遗传算法流程Fig.5 Process of Genetic Algorithm
3.3 约束条件
汽车动力性指标主要有:最高车速、最大爬坡度、加速时间。具体约束项,如表3 所示。
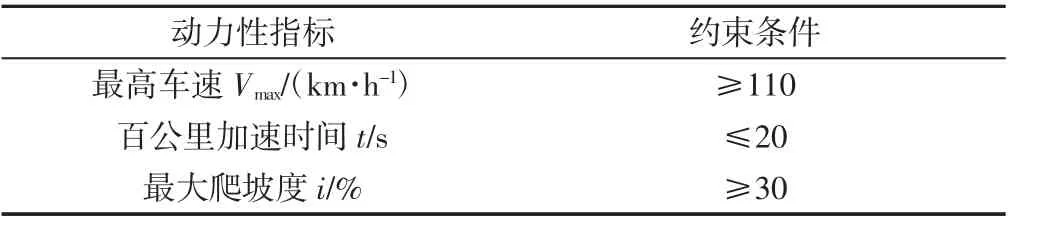
表3 动力性约束指标Tab.3 Dynamic Constraint Index
采用“罚函数”法对约束条件进行处理[13],“罚函数”通过对非可行解施加惩罚,以此来减少违反约束个体在下一代群体中的生存概率,加快其淘汰速率。
3.4 目标函数
为使油耗和排放量综合最小化,引入权值系数构建目标函数[14],其目标函数为:
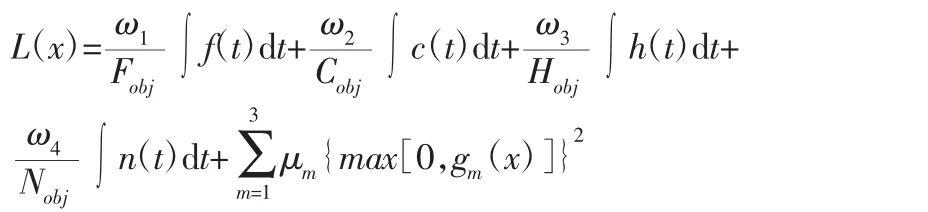
式中:ω1~ω4—优化子目标的权重因子;f(t)—油耗值;c(t)—CO 排放值;h(t)—HC 排放值;n(t)—NOx排放值;Fobj、Cobj、Hobj、Nobj—油耗及排放对应的优化目标值;μm—惩罚因子,取μm=50,m—动力性约束条件个数,g1(x)=110km/h-Vmax;g2(x)=20s-t;g3(x)=30%-i。
3.5 运行参数设定

表4 遗传算法运行参数Tab.4 Operation Parameters of Genetic Algorithm
在MATLAB 平台上采用遗传算法对模糊规则及整车动力性参数进行优化,在通过多次算法测试后,发现种群大多在40 代后趋于平稳,因此选取遗传算法的终止进化代数为50。遗传算法交叉概率通常取(0.4~0.99),变异概率通常取(0.001~0.1)[15],为提升全局搜索效果及收敛效率,选取较高的变异率并设定为0.1,为保留优秀基因的结构,选取适中的交叉率为0.8。具体参数选定,如表4 所示。
4 测试结果及分析
通过硬件在环HIL 仿真测试系统对混动汽车模糊控制策略的有效性进行了验证。
硬件在环仿真实验系统各部分组成及功能如下:混动系统模型包含整车控制模块和底层控制模块,整车控制包括整车需求转矩计算、工作模式判定、各部件起动需求判断及模糊控制策略等,底层控制模块包含EMS、MCU、BMS、TCU 四部分,用于直接控制目标部件的工作模式及工作状态,如MCU 用于控制电机工作状态、工作模式(驱动或发电)及电机转矩需求[16]。将控制策略模型通过ECUCoder 代码生成工具编译为C 语言并移植到控制器硬件中,整车控制器RapidECU-S1 主处理器采用MPC5674F,工作电压为32V,工作环境为(-40~105)℃,具有4 路CAN 接口、1 路RS232 串行通信接口、1 路RS485 串行通信接口。混动台架主要由发动机、电动机、电池、离合器、变速箱等部分组成,整车控制器与台架之间通过CAN 总线进行通信。台架及控制器的上位机平台用于数据交互、监测信号变化及存储记录数据。测试系统架构,如图6 所示。
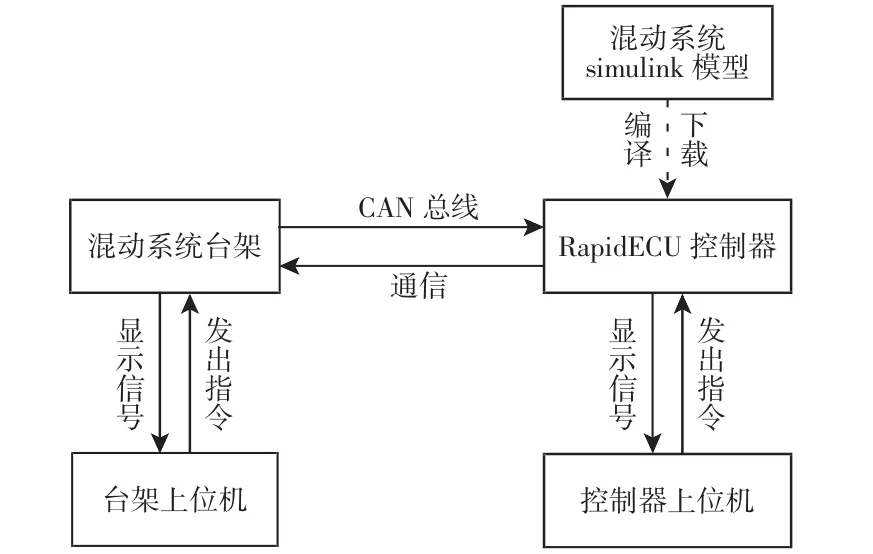
图6 测试架构图Fig.6 The Framework of Test
C-WTVC 重型商用车循环工况运行时间持续1800s,总运行里程为20.51km,平均车速为40.9km/h,最高车速为87.8km/h,选择C-WTVC 为测试工况并将SOC 初始值设定为0.8,验证模糊控制策略的有效性。利用遗传算法优化后的模糊控制器规则表,如表5 所示。
利用遗传算法得到控制策略参数最优解,在优化结果中,车速阈值Vl=14.7,主减速器速比i0=5.8。与原方案相比,主减速器速比减小,相应的主减速器总成减小,有利于整车轻量化的目标。优化前后控制策略仿真结果对比,如表6 所示。
优化后整车燃油消耗降低了2.7%,HC、CO、NOx分别降低了2.4%、5.6%、0.9%,通过遗传算法优化,整车燃油消耗量有所降低,且各排放值都有不同程度的降低。
遗传算法寻优前后发动机工作点,如图7 所示。通过对比可得,矩形框图内工作点显著增多,证明优化后部分工作点转移至低油耗区域,有利于减少整车能量损耗。此外,优化后发动机在高效区域内的工作点分布更为集中,最大限度的发挥了发动机的工作特性,且多数工作点分布在中低油耗区域及最经济油耗线附近,有效的提升了整车燃油使用效率。

表5 优化后的模糊控制规则Tab.5 Optimized Fuzzy Control Rules

表6 优化前后结果对比Tab.6 Results Compared Before and After Optimization


图7 优化前后发动机工作点图Fig.7 Engine Operating Point Profiles before and After Optimization
模糊控制策略优化前后电池组的变化曲线,如图8 所示。CWTVC 循环后SOC 终值由0.32 增加到0.36,相较原策略,使用遗传算法优化后的模糊控制策略能将电池组SOC 约束在一个更小的变化范围之内,有利于减少动力电池组能量损耗,提升整车的续航里程并能够延长动力电池组循环使用寿命。

图8 优化前后SOC 曲线Fig.8 SOC Profiles Before and After Optimization
5 结论
针对并联式混合动力系统能量管理的多变量、非线性、强耦合等特点,建立并联式混合动力汽车的模糊转矩分配策略,采用遗传算法对模糊规则及动力性参数进行优化,并在HIL 平台中验证了优化后模糊控制策略的有效性。(1)在C-WTVC 工况下对优化前后的策略进行测试,对比原策略结果可得,优化后的策略燃油经济性改善2.7%,CO 排放降低了5.6%,HC 和NOx排放性都有不同程度的改善,此外,优化后主减速器的传动比下降,有助于减小动力总成的体积及重量。(2)优化后发动机在高效区域内的工作点增加,且集中分布于低油耗区及最佳油耗曲线周围,最大限度的改善了发动机的工作环境。同时,优化后的策略能够减小循环过后动力电池组SOC 值的变化量,有助于增加电池组的使用寿命。从而验证了基于遗传算法优化并联式混合动力电动汽车模糊控制策略的可靠性。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
消费导刊(2017年19期)2017-12-13
电子制作(2017年7期)2017-06-05
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
噪声与振动控制(2015年4期)2015-01-01
客车技术与研究(2014年1期)2014-03-20
汽车电器(2014年8期)2014-02-28
