某起竖机构起竖速度过慢误报警问题分析与对策
2020-12-26 02:04王志勇李博刘海阳
工程建设与设计 2020年24期
王志勇,李博,刘海阳
(北京航天发射技术研究所,北京100076)
1 引言
起竖机构在起竖动作过程中,需要对起竖角速度进行监测,以判断整个起竖过程中机构是否按预设速度进行,进而确认起竖执行机构是否正常工作。本文以一起数据截断误差导致某起竖机构起竖速度过慢的误报警故障为例,通过对数据处理方式分析以及试验验证,确定故障原因,并针对此类故障提出了相应的抑制措施,提高设备的可靠运行水平。
2 起竖系统原理及故障现象
起竖控制系统一般采用轴角传感器测量起竖耳轴旋转角度,获取起竖角度,作为起竖到位的判定。过程中,起竖控制器基于起竖角度进行差分计算,以获取起竖机构的角速度,根据不同起竖角度设定不同起竖目标速度,并进行速度闭环控制,输出对应的液压控制量,驱动起竖液压缸伸出,以实现整个起竖过程平稳快速动作。同时,起竖过程中对角速度进行阈值判断,确认过程中是否存在速度过快的失控现象,或者速度过慢的机构卡滞故障。
某起竖机构在起竖过程中,报警起竖角速度过慢,起竖过程异常中止。该机构起竖角速度过慢报警的触发条件是3s内角度变化不超过1.2′。检测该起竖速度数据曲线,发现起竖角速度存在突变现象,如图1 所示。该起竖机构的轴角传感器采用CANopen 接口多圈光电编码器,起竖控制器采用32 位计算机。
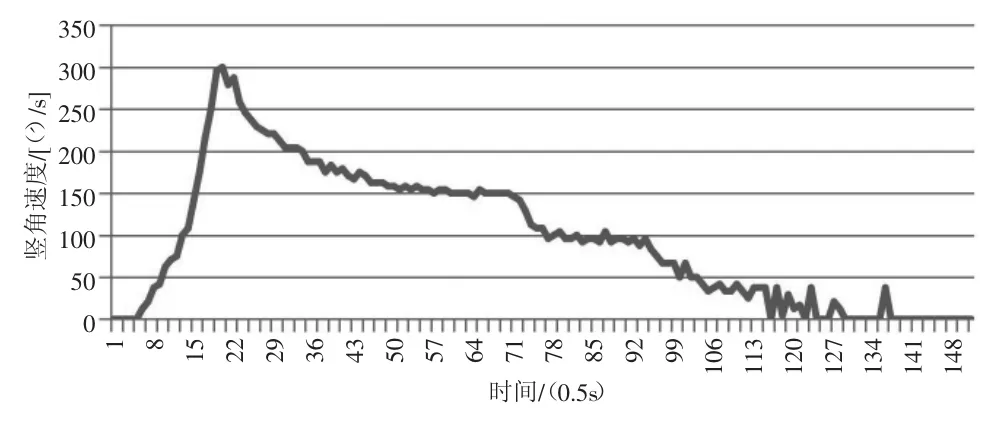
图1 异常速度曲线
3 问题分析和对策
3.1 问题分析
对异常机构起竖过程记录数据进行分析,光电编码器CAN 总线输出的原始值数据曲线平滑,并无突变现象。基于此原始数据,在实验室利用控制器和相应软件进行模拟,发现经软件处理后的起竖角度值呈阶梯状变化,以角度29°~30°为例,起竖角度如图2 所示,以此起竖角度数据计算出的角速度存在突变,与故障现象相符。
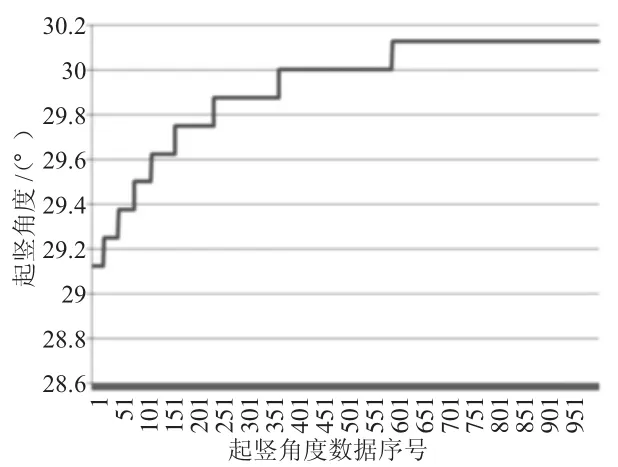
图2 异常起竖角度
进一步分析计算机软件使角度值呈阶梯状变化的原因。多圈编码器的单圈分辨率为 65 536(16 位),最大圈数4 096 圈。多圈编码器原始值包括圈数和单圈角度分辨值,控制器软件对原始值的处理方法如下:
1)按式(1)实时计算多圈编码器绝对角度值N:

式中,Q 为多圈编码器圈数;n 为多圈编码器单圈内角度分量。
2)在机构回平状态下,存储多圈编码器绝对角度值N0,作为起竖角度的基准值;
3)起竖过程中,按式(2)实时计算起竖角度U:

多圈编码器绝对角度值据存储为float 型,二进制占32位,其中数据占23 位,数据中包括整数和小数,若整数占位多,则小数占位少。编码器圈数、角度值整数占位、小数占位对应关系如表1 所示。
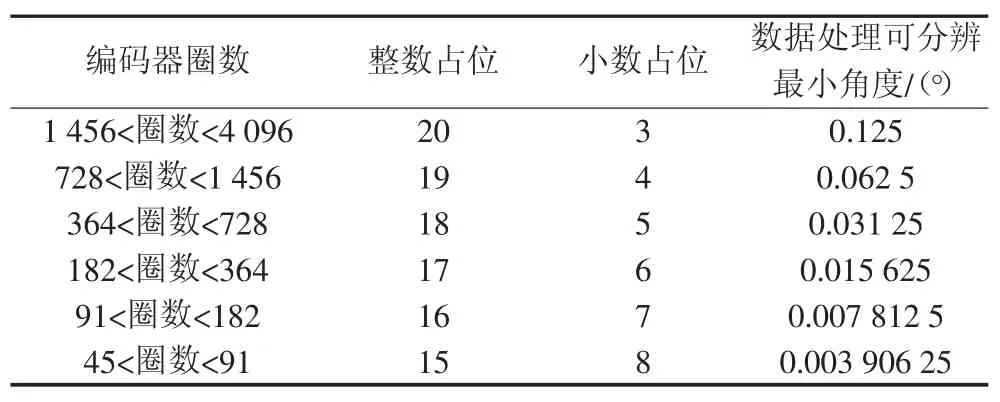
表1 编码器圈数、角度值整数占位、小数占位对应关系
由表1 可知,随着编码器圈数的增大,数据处理的分辨率逐渐变差,截断误差逐渐增大[1]。编码器单圈分辨率65 536(16位),相当于360/65 535=0.005 49°,好的数据处理,其可分辨的最小角度应小于编码器自身分辨角度。
异常机构光电编码器CAN 总线输出的原始值圈数为4 094~4 095,控制器软件最小可分辨0.125°,角度变化存在较大阶跃,在差分计算角速度速度时,导致速度突变,角度变化越缓慢,角速度突变现象越明显。
起竖动作为角速度闭环控制,起竖过程中实时计算当前角速度值,与设定的目标角速度值进行比较,软件根据其差值调整比例流量阀的控制量,并且在接近起竖目标角度时,为避免震荡,使机构缓慢减速,控制量只减小,不增加。正常情况下,计算得出的角速度与设定的目标角速度拟合较好,控制量缓慢调节直至机构进入精度范围;异常情况下,计算得出的角速度存在突变,其数值远大于设定的目标角速度。软件根据比较结果,快速减小控制量,一旦控制量减小至比例流量阀死区值,则机构动作极其缓慢或停止动作,产生起竖角速度过慢误报警。
综上所述,起竖速度过慢误报警问题的原因为编码器安装圈数过大,计算过程角度数据过大,影响控制软件数据处理的分辨率,起竖角度截断误差过大,进而导致计算角速度存在突变,起竖闭环控制异常。
3.2 处理对策
起竖机构量产过程中,起竖编码器安装后,其安装圈数是随机值,如果将所有编码器的安装圈数调小,必然带来巨大的工作量,因此人工调整编码器安装圈数不可行。在此情况下,为避免出现计算过程出现大角度数据影响数据处理分辨率的问题,可采用如下起竖角度处理方法:
1)在机构回平状态下,存储多圈编码器圈数和单圈内角度分量,作为起竖角度的基准值;
2)起竖过程中,按式(3)实时计算起竖角度:

软件完善后,通过对实际起竖机构的试验验证,角速度曲线平滑,已无突变现象。
4 结语
本文通过某起竖机构起竖速度过慢误报警问题的分析、处理和验证,说明了数据处理截断误差的影响和应对方法。截断误差是计算机数据处理过程中必然存在的一种特性,在计算数值较大,尤其在差分计算时,其影响将被放大,甚至影响系统正常运行,设计时应予以关注。数据处理设计过程中,应对处理方法进行优化,尽量避免较大数值的数据产生。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
科学与财富(2020年24期)2020-10-27
家庭医药·快乐养生(2018年9期)2018-09-27
家庭医药(2018年18期)2018-02-01
制造技术与机床(2017年7期)2018-01-19
恋爱婚姻家庭·养生版(2018年12期)2018-01-15
中学生数理化·高一版(2017年3期)2017-07-08
西安工程大学学报(2016年6期)2017-01-15
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15