基于有限元分析的配网带电作业机器人用J型线夹安装工具的研制
2020-12-28 15:39沈彦波刘晨狄美华赵伟高天宝李文华董岩赵崇
中国电气工程学报 2020年19期
关键词:有限元分析
沈彦波 刘晨 狄美华 赵伟 高天宝 李文华 董岩 赵崇


摘要 带电作业作为一种检修手段在提升供电可靠性方面的作用日益凸显,而传统人工带电作业劳动强度大、安全风险高、工作环境恶劣,属于高空、高危、高强度作业。于是,配网带电作业机器人应运而生,目的是为了保障作业人员人身安全、降低作业人员劳动强度。配网带电作业机器人在北京地区试点应用过程中,出现了末端工具与现场作业环境不匹配的情况,因而研制出一种适配于北京地区的末端工具直接关系到机器人现场实际应用的落地。基于有限元方法,本文主要描述目前配网带电作业机器人带电接引项目涉及的J型线夹安装工具的研制以及实际应用。
关键词:带电作业机器人,有限元分析,J型线夹,末端工具
1 引言
当前,带电作业已成为电力设备检修、检测、业扩、改造的重要手段,在减少停电损失、降低线损、提高可靠性指标、开展在线监测和状态检修方面都发挥了积极作用,并将发展成为状态检修和主动检修的主要手段。以往传统的人工带电作业主要存在三种安全风险:高空坠落风险、高压触电风险以及误操作风险。为将作业人员从危险的作业环境中解放出来,降低带电作业危险系数、扩大带电作业
范围、提升智能化作业水平,配网带
综合国内外针对末端工具的研究现状以及现场应用情况,适用于配网带电作业机器人的系列化末端工具研究还不足,末端工具的地区适应性还不够。
本文针对目前带电作业任务量较多的接引项目,基于有限元法,研制出了满足北京地区施工质量标准的J型线夹安装工具,并成功应用到了现场,此末端工具的研制成功,在全国范围推广应用方面具有重要意义。
2 研制内容
电作业机器人逐步得以推广应用。而研制出与当地配网架空线路适配的末端工具是机器人能够现场应用的一个关键因素。
所谓J型线夹安装工具,就是应用于配网带单作业机器人的,采用机械传动、传感器定位、自动化控制等技术的一种接线工具。工具采用实时通讯控制方式与机器人配套使用,可完成10kV配网架空线路J型线夹自动安装作业,实现主导线与引线的可靠连接,安装的J型线夹如图1所示。
在J型线夹安装工具研制过程中,一项重要的内容即为该末端工具需满足作业扭矩的设定值,这直接影响J型线夹安装的是否牢固:过大的扭矩会损伤导线甚至将J型线夹损坏,而扭矩不够又会使线夹与导线间存在缝隙,导致“虚接”,运行时不断发热甚至烧毁。通过测试线夹导流、电阻等特性参数,确定J型线夹的扭矩值需达到32牛米,我们找到了满足这项参数的J型线夹,对末端工具进行了基于有限元分析的应力仿真,保证末端工具在满足扭矩的要求下夹紧导线,保证接续效果。
2.1 建立模型
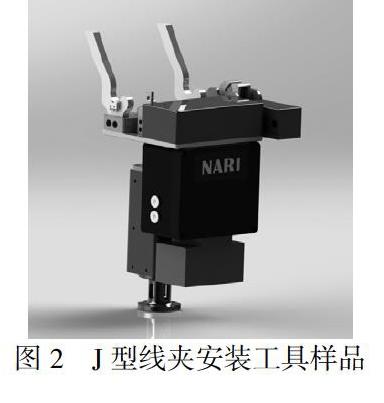
J型线夹安装工具的样品如图2所示。
应用Ansys Workbench模块,建立了末端工具、J型线夹、主导线以及待接引流线的等尺寸的三维有限元模型,模拟实际现场的接引情形。
2.2 有限元分析
通过对建立的三维有限元模型进行网格划分并施加相应的应力荷载,从而满足扭矩达到32牛米的效果,用来测试了末端工具的表现,如图4所示。仿真结果显示,荷载集中施加于J型线夹,使线夹夹紧。
為了更清楚地分析仿真效果,选取局部进行显示,如图5所示,由图可知,施加的应力全部集中于J型线夹,能够使拧紧后的J型线夹将夹紧力传递到导线上,接续效果良好。
3 实际应用
基于有限元分析的扭矩测试通过后,首先对J型线夹安装工具的样品进行了模拟应用,通过模拟测试的效果,进行末端工具的优化,最终进行了现场实际应用。
3.1 模拟应用
模拟应用场景为不带电的10kV配网架空线路,通过在模拟线路进行多次的应用,有针对性的对末端工具进行了调整与优化,使其更好地适配于北京地区的线路,确保成功应用到实际现场。
3.2 实际应用
有了前期模拟应用的经验,在2020年7月31日,北京地区完成了首次实际现场应用配网带电作业机器人开展的带电作业,这也是在全国范围内首次应用J型线夹安装工具这一新型末端工具,成功一次性完成三相接引工作。
4 小结
下一步,通过借鉴研制成功的J型线夹安装工具,以现场需要为导向,继续创新研发其他种类的末端工具,扩展作业项目,助力打造适用于北京地区的多场景、多项目的带电作业利器。进而提升公司配网管理水平,支撑智能化运检规划实施,保障作业人员人身安全、降低劳动强度,为首都电网的安全运行保驾护航。
参考文献
[1] 高压带电作业机器人的现状和发展[J].吴轲,张建伟,华栋,崔佩仪.电子技术与软件工程.2018(09).
[2] 10kV架空配电线路带电作业指导书[M].中国电力出版社,上海市电力公司,2007.
[3] 10kV配网线路非常规引流线带电接入新技术研究[J].孙承勇,段云波,王茂.云南电力技术.2015(02).
[4] 机器人末端工具快换装置的设计及优化[D].李娜.山东大学.2017.
[5] 基于ANSYS Workbench的汽车车架静力学分析[J].郭建华.长春师范大学学报.2017(06).
[6] 基于有限元模型的新能源车车身静力学分析[J].张星驰,冯国胜,张新路,马俊长.汽车工程师.2019(07).
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
企业技术开发·下旬刊(2016年11期)2016-12-27
现代商贸工业(2016年25期)2016-12-26
演艺科技(2016年11期)2016-12-24
山东工业技术(2016年23期)2016-12-23
山东工业技术(2016年23期)2016-12-23
文艺生活·中旬刊(2016年11期)2016-12-13
航空兵器(2016年4期)2016-11-28
科学与财富(2016年15期)2016-11-24
科技视界(2016年18期)2016-11-03