轻型跨坐式单轨车辆动力学性能评价指标分析
2021-01-11 06:10赵增闯包佳健朱冬进
大连交通大学学报 2021年1期
赵增闯,包佳健,朱冬进
(中车浦镇庞巴迪运输系统有限公司,安徽 芜湖 241000)*
跨坐式单轨交通作为城市轨道交通的一种形式,以其自身的特殊适应性成为中小城市、海滨城市和山地城市轨道交通的首选形式,具有对复杂起伏的地形有较强的适应性,土地占用量小、运输量适中、噪声小、造价低、转弯半径小等优点,现在多个国家均有运营使用[1-2].
由于跨坐式单轨在国内运营线路较少,目前还没有制定相关跨坐式单轨车辆动力学性能评价标准.单轨车辆动力学性能指标主要包括运行稳定性、平稳性及曲线通过性能等三个方面.部分学者借鉴GB5599等评价思想,根据重庆跨坐式单轨车辆的特点提出了以修订倾覆系数、轮轨横向力、防止车辆脱轨稳定性指标、导向轮导向力、转向架导向力矩、车体浮心高度、走行轮轮重减载率、走行轮侧偏角以及走行轮胎最大垂向作用力等评价指标来对跨坐式单轨车辆的动力学性能进行评价[3-5].
庞巴迪轻型跨坐式单轨系统有别于传统跨坐式单轨系统,采用690 mm宽度的连续轨道梁、14t轴重的单轴转向架、地板面高度仅为450 mm的低地板等技术,是一种适用于中等运量的轻型跨坐式单轨系统[6].因此基于地铁及传统跨坐式单轨车辆的动力学性能评价指标是否完全适用值得进一步研究,有必要探讨适用于轻型跨坐式单轨车辆的评价指标.
本文参考有关文献[7-8]并结合庞巴迪单轨特点,采用动力学仿真UM软件建立了仿真模型,初步研究车辆稳定性能、平稳性能,以及采用稳定轮倾覆系数、走行轮倾覆系数、导向轮径向力、临界侧滚角等作为评价指标的适用性.
1 稳定性能分析
文献[9]采用了动力学模型特征根法计算单轨车辆蛇行临界速度,得出了蛇行临界速度与水平轮径向刚度和径向阻尼有关的结论,必须保证导向轮及稳定轮具有足够的径向刚度,以及其与轨道梁侧面具有足够的预压力.
导向轮起着引导单轨车辆沿轨道梁运行的作用,导向轮与轨道梁导向面具有一定初始预压力,设计初始预压力5 kN,为了保证车辆运行稳定性,导向轮应不得与轨道梁脱离接触,即导向轮径向力应大于0.通过分析无轨道激扰路面下导向轮径向力收敛情况以及有轨道激扰路面导向轮径向力是否大于0来判断车辆临界速度.
图1为无轨道激扰时导向轮径向力随速度变化关系图,当速度为235 km/h时导向轮径向力能够很快收敛到平衡位置并保持稳定,当速度为240 km/h时,导向轮径向力已无法收敛到平衡位置,并趋于发散,车辆处于失稳状态.因此认为该单轨车辆的直线临界速度为235 km/h.根据图2,在美国六级谱激扰下,车辆以速度235 km/h运行时,导向轮径向力变化幅度较大,已经出现个别点的径向力等于0的情况,车辆最大设计速度90km/h,远小于临界速度,导向轮径向力最小值在3 kN左右,车辆具有足够的安全余量.
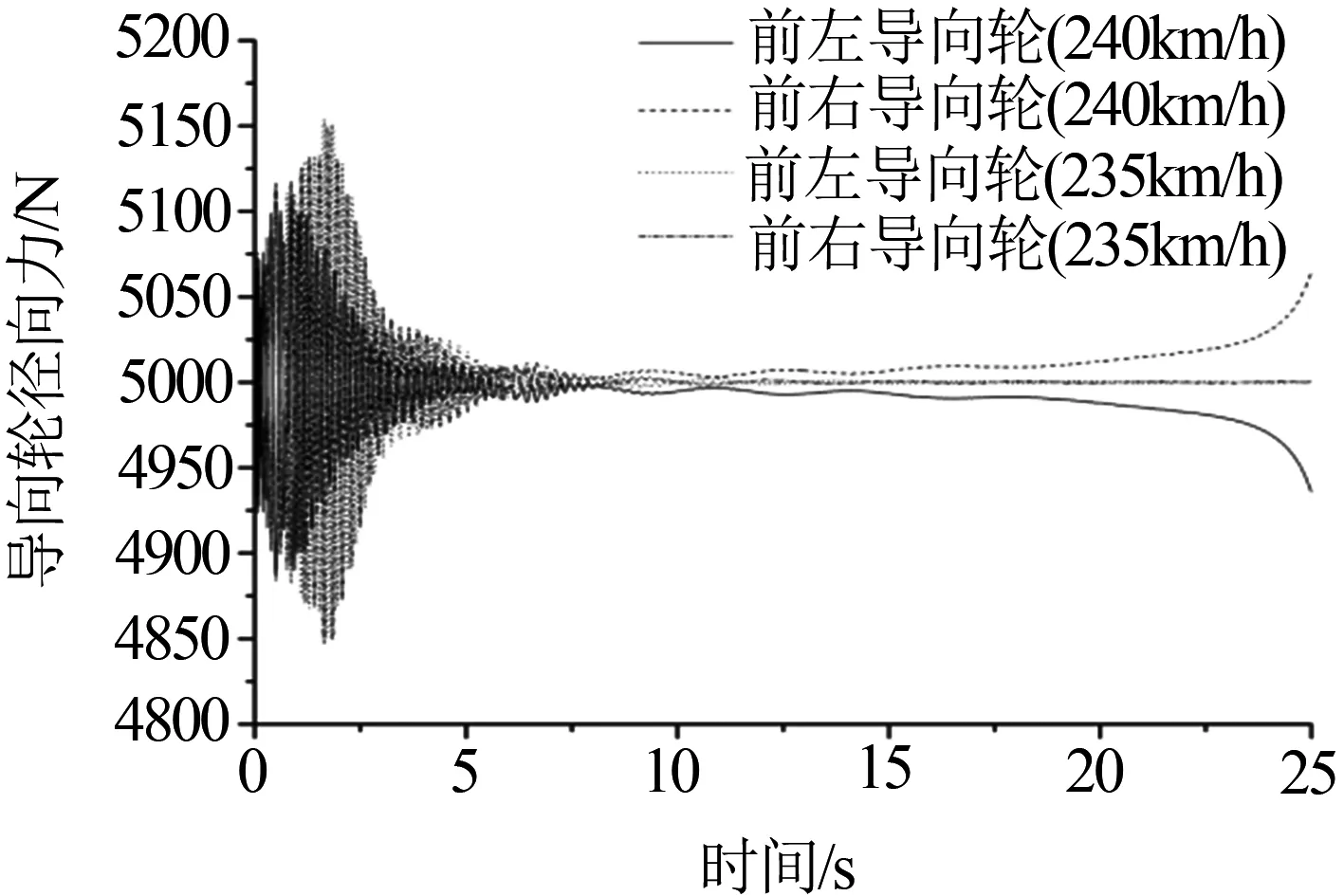
图1 无轨道谱时导向轮径向力变化

图2 美国六级谱激扰下导向轮径向力
2 平稳性能分析
目前评价车辆乘坐舒适性能的标准有GB5599、EN12299、ISO2631等.EN12299主要针对钢轮钢轨车辆进行舒适性评价,其要求采用持续5min舒适度测试数据进行评价,这不符合单轨较短站间距的实际情况.ISO2631并无限定性评价要求,且其评价受影响因素较多.GB50458《跨座式单轨交通设计规范》、CJ/T287《跨座式单轨交通车辆通用技术条件》规定车辆动力学性能指标应符合GB5599的规定,因此本文采用GB5599中对于客车的Sperling平稳性指标进行评价,该指标小于2.5为优秀等级.
目前并无实测的单轨轨道谱,计算中轨道激扰采用美国六级轨道谱[10],图3为单轨车辆Sperling平稳性指标计算值,垂向及横向平稳性指标均小于2.5,达到优级标准,横向平稳性指标要优于垂向平稳性指标.实际的平稳性指标最终由实际轨道谱决定.
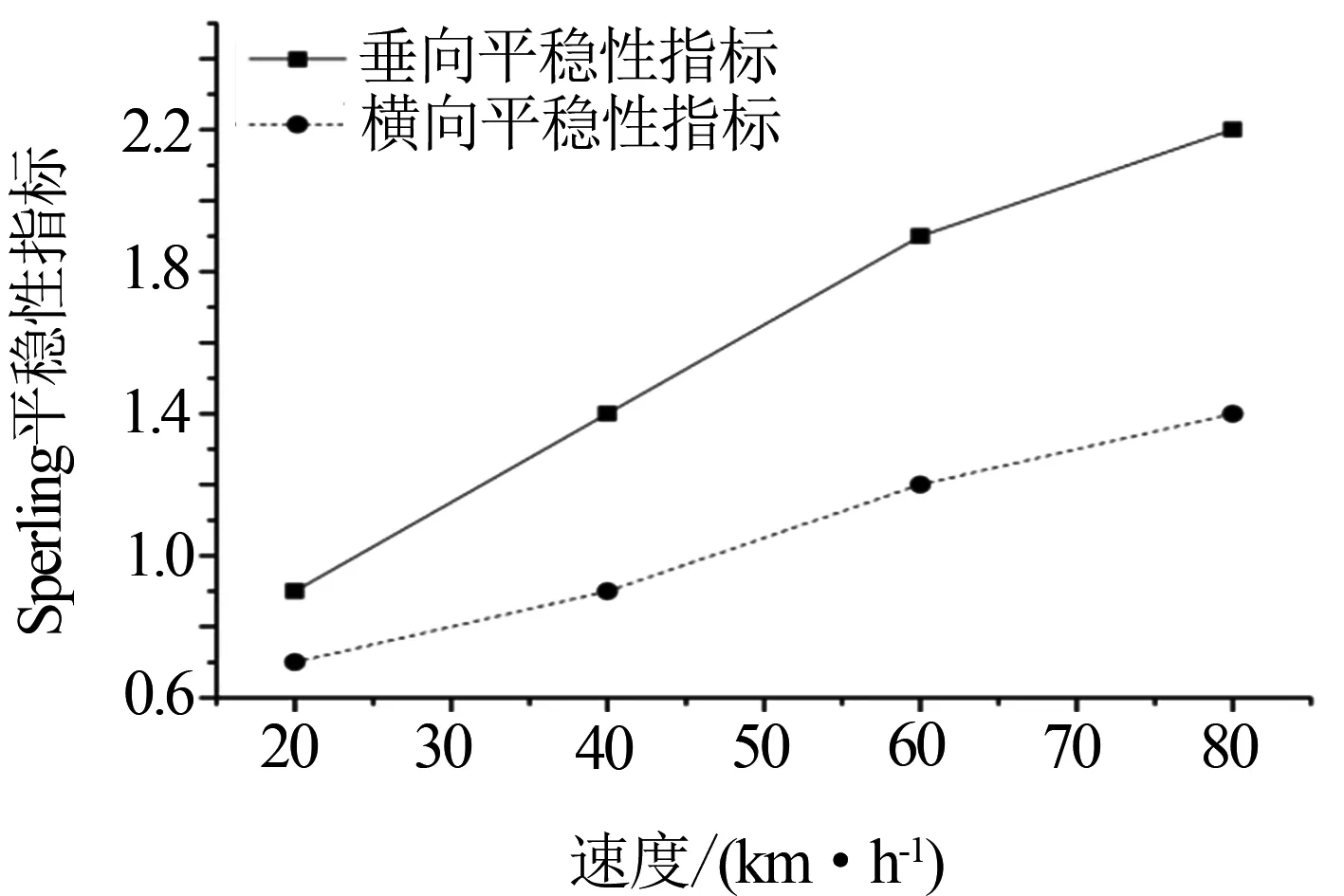
图3 单轨车辆Sperling平稳性指标
3 曲线通过性能评价指标分析
计算中曲线段考虑取允许最大曲线超高率12%,曲线半径100 m,缓和曲线长度45 m,考虑允许最大欠超高率5%,曲线通过速度45 km/h[11].
3.1 稳定轮倾覆系数
文献[12]通过公式推导和仿真研究指出当导向轮和稳定轮全部与轨道梁接触时,单轨车辆的抗倾覆能力处于最大状态,但是当一侧稳定轮离开轨道梁后,单轨车辆的抗倾覆能力降低到原来的一半左右,因单轨车辆稳定轮对车辆的抗倾覆性能有着极大影响,必须控制稳定轮的预压力,保证其与轨道梁可靠接触.
单轨车辆以45 km/h速度通过R100m曲线时,前转向架稳定轮径向力及倾覆系数仿真结果如图4、图5所示.
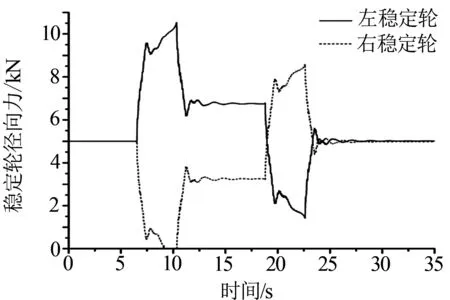
图4 稳定轮径向力
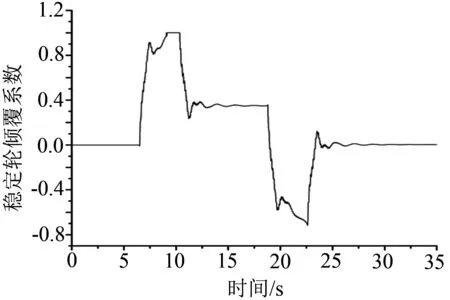
图5 稳定轮倾覆系数
根据仿真数据可知,除了非稳态阶段即入缓和曲线段处稳定轮倾覆系数有1.2 s内瞬时达到1之外,其余均小于1,非稳态状态下稳定轮径向力瞬时为0不足以说明车辆不安全,根据导向轮径向力、车辆侧滚角参考指标可判断车辆处于安全状态.在稳态阶段即圆曲线段处稳定轮倾覆系数为0.32,满足小于0.8的指标要求.
重庆单轨在43 km/h下通过半径100 m曲线时稳定轮倾覆系数为1;在36 km/h下圆曲线段该值为0.5,在缓和曲线段0.8 s内仍达到了1[7].采用稳定轮倾覆系数能够有效评价轻型跨坐式单轨车辆曲线通过安全性能.
3.2 走行轮倾覆系数
不考虑离心力、侧风等因素,设前转向架左走行轮径向力为F1,右走行轮径向力为F2,导向轮及稳定轮提供的抗倾覆力矩为M,走行轮间距为s,车体质量G,车辆向一侧侧滚时重心横移量为Y,则根据力矩平衡方程有:
F1+F2=G
F1×0.5s+M=F2×0.5s+GY
设:M=GΔY
计算得:
则走行轮倾覆系数为:
根据公式,走行轮倾覆系数与车辆侧滚横移量成正比,与走行轮间距成反比,重庆单轨地板面高度为1 130 mm,车辆重心较高,侧滚时车辆横向位移相对较大,而庞巴迪单轨为低地板,地板面高仅为450 mm,另外重庆单轨走行轮间距为400mm,庞巴迪单轨走行轮间距为350 mm,轮间距相差较小.重庆单轨以36 km/h通过半径100 m曲线时的走行轮倾覆系数达到了0.34[3],庞巴迪轻型单轨走行轮倾覆系数应较小.
前转向架走行轮径向力及倾覆系数仿真结果如图6、图7所示.走行轮倾覆系数最大值为0.015,远小于指标要求的0.8,过曲线时左、右走行轮增减载变化较小.采用走行轮倾覆系数无法有效评定轻型跨坐式单轨车辆的曲线通过安全性能,但可作为一个参考值.
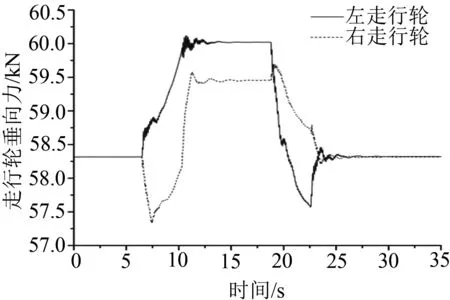
图6 走行轮垂向力

图7 走行轮倾覆系数
3.3 导向轮径向力
单轨车辆在直线上运行时,其导向轮径向力变化较小,具有良好的安全性能.因此主要考虑曲线条件下的导向轮径向力变化情况.
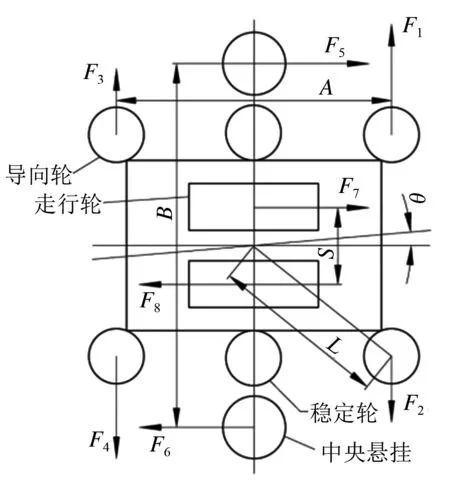
图8 曲线通过受力分析示意图
图8为单轴转向架过曲线时的受力分析示意图,设转向架相对轨道梁转角为θ,根据力矩平衡得:
F1A-F3A-F5B-F7s=0
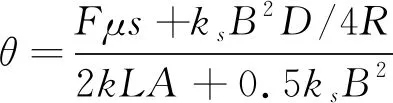
式中:F为走行轮垂向载荷,N;μ为走行轮摩擦系数;s为走行轮间距,mm;ks为中央悬挂水平刚度,N/mm;B为中央悬挂横向中心距,mm;k为导向轮径向刚度,N/mm;L为转向架回转中心到导向轮心距离,mm;A为导向轮纵向距离,mm.
即过曲线时转向架相对轨道梁并非处于径向位置,而是产生了一个冲角,冲角的存在一方面令转向架顺利通过曲线,另一方面也加重了导向轮受载不均衡,加速了导向轮的曲线磨耗.
此时转向架相对车体回转角度α1:
其中,D为车辆定距mm,R为曲线半径mm.
庞巴迪轻型跨坐式单轨车辆采用了专利技术的辅助导向装置,其为转向架曲线转向提供了一个附加的转向力矩M[13],转向架相对车体回转角度α2:
图9为转向架相对车体转角对比,有辅助导向作用时转向架基本处于径向位置,无辅助转向作用时转向架相对转角较小,且计算值和仿真值较接近.
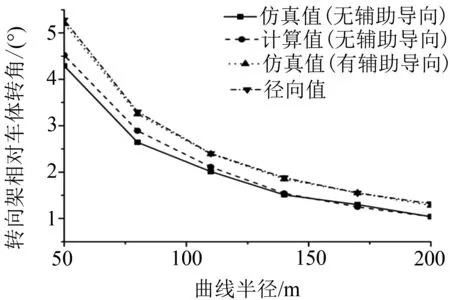
图9 转向架相对车体转角对比图
前转向架导向轮径向力仿真结果如图10所示.
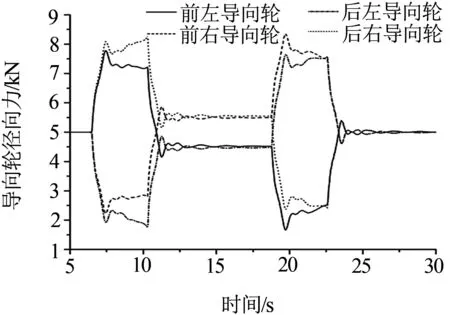
图10 导向轮径向力
导向轮径向力在缓和曲线段均大于1.6 kN,在圆曲线段均大于4.5 kN,远大于“转向架某一侧一个径向力为0,另一个的径向力小于预压力的0.1倍预压力即0.5 kN”的指标要求[3],主要原因为庞巴迪的轻型跨坐式单轨车辆采用了辅助导向技术,改善了导向轮曲线通过时的径向力分布不均问题,缓解了导向轮胎磨耗[13].导向轮径向力能够满足评价指标的要求,可以作为一个参考值.而重庆单轨在43 km/h通过半径R100m曲线时,一侧导向轮径向力几乎为0,处于临界失稳状态[8].
3.4 车辆侧滚角
当车辆质心超出轨道梁宽度区域时,车辆的抗倾覆稳定性能较差,应避免出现这样的情况,如图11所示.当单轨车辆质心处于轨道梁宽度L=690 mm区间时,其中h1取AW3超载工况车辆质心距轨面的高度最大值为1.035 m,设单轨车辆临界侧滚角φmax1为:
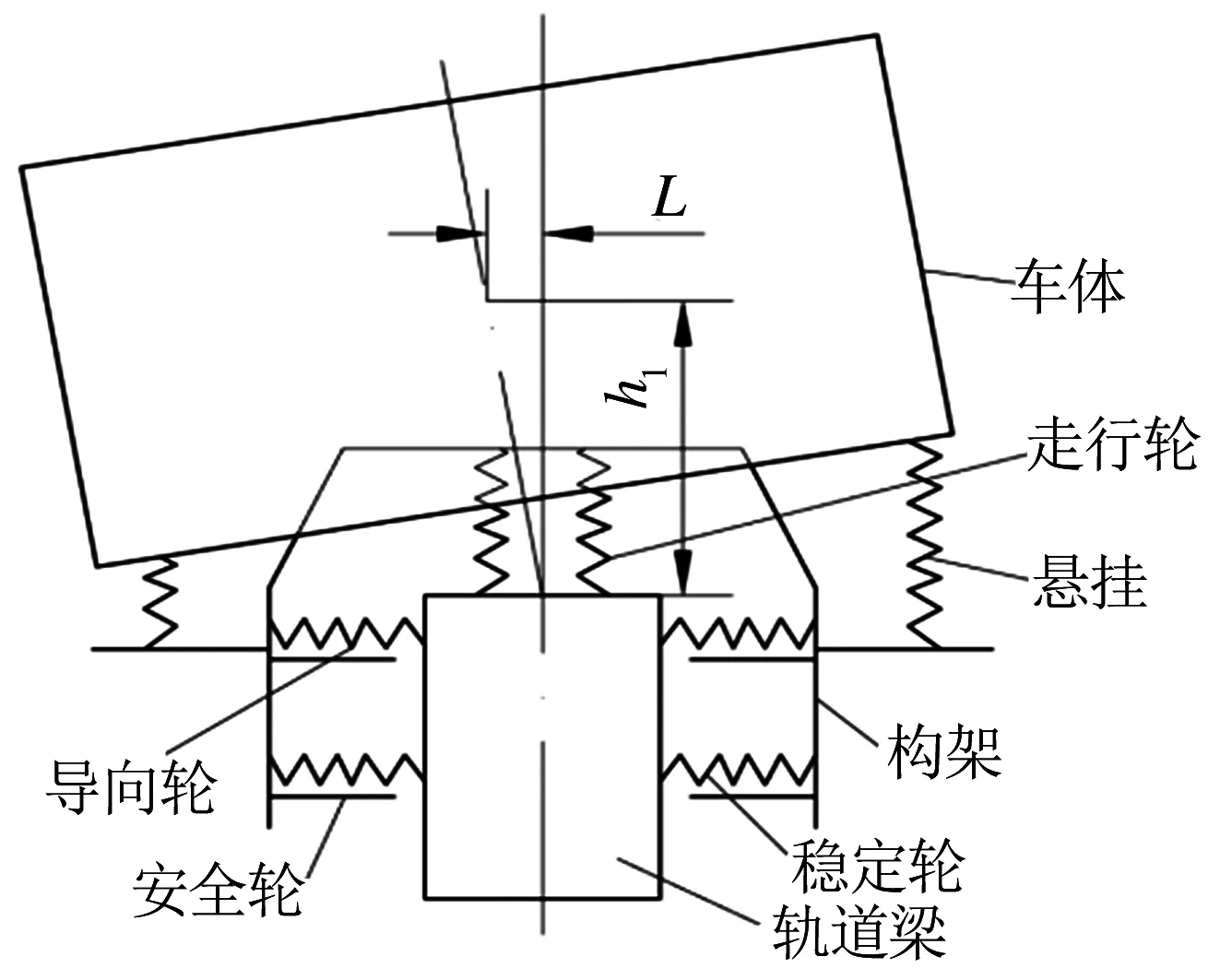
图11 临界侧滚角计算示意图
当车辆质心处于走心轮之间时,具有很高的抗倾覆稳定性[9].当单轨车辆质心处于走行轮距s=0.35 m区间时,设单轨车辆临界侧滚角φmax2为:
(1)正常工况侧滚角分析
单轨车辆以45 km/h速度通过R100m曲线时,车辆侧滚角仿真结果如图12所示.车辆侧滚角最大值为6.7°,小于临界侧滚角φmax2,车辆具有良好的抗倾覆稳定性.
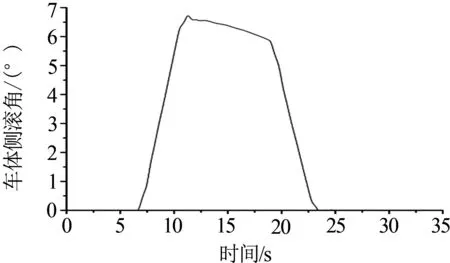
图12 车体侧滚角
(2)故障工况最大侧滚角分析
图13为车辆正位状态及最大侧滚状态示意图,最大侧滚状态考虑车辆一侧导向轮胎和斜对侧稳定轮胎失气,导向轮安全轮和稳定轮安全轮均与轨道梁接触;考虑车辆同一侧垂向止挡接触.计算导向轮和稳定轮同时失气工况下的车辆侧滚角以及转向架垂向止挡接触时的车辆侧滚角.
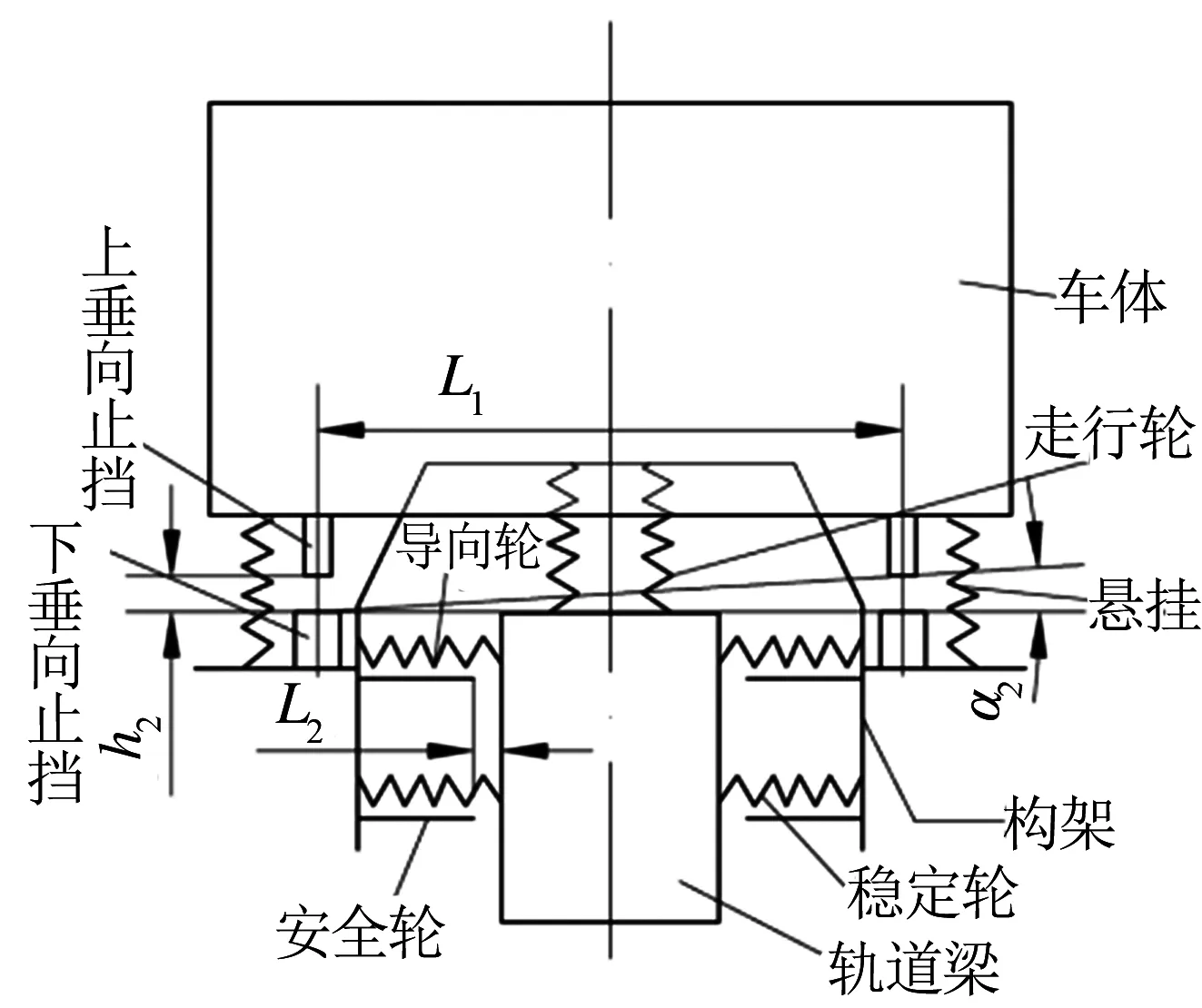
(a) 正位状态
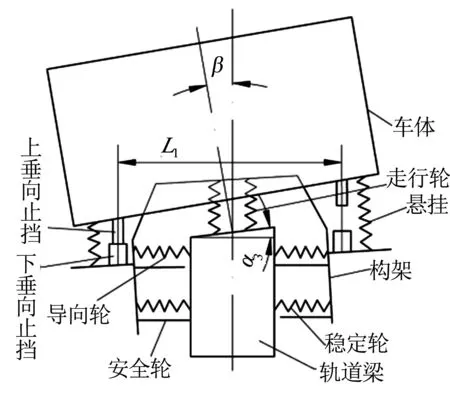
(b)最大侧滚状态
如图13(a),水平轮(含导向轮和稳定轮)安全轮距轨道梁距离为L2=22 mm,当安全轮与轨道梁接触时,车辆侧滚角α1为3.3°.转向架垂向止挡间隙h2=66 mm,左、右侧垂向止挡距离为L1=1540mm,则当转向架上、下垂向止挡接触时,车辆侧滚角α2为:
如图13(b),当车辆处于最大曲线超高率12%的线路上时,轨道梁超高角α3为6.8°.
车辆最大侧滚角度β为:
β=α1+α2+α3=3.3°+2.5°+6.8°=12.6
则:φmax2<β<φmax1
即车辆在最大侧滚角状态下,车辆质心仍处于轨道梁宽度区域内,但处于走行轮距之外,车辆具有较好的抗倾覆稳定性能.临界侧滚角能够有效评价轻型跨坐式单轨车辆曲线通过安全性能,可以作为一个评价指标.
4 结论
本文初步分析了轻型跨坐式单轨车辆动力学性能评价指标的适用性,根据计算结果可以得到以下结论:
(1)采用导向轮径向力变化指标判断单轨车辆直线运行稳定性能具有可行性;采用Sperling平稳性指标能够有效反映单轨车辆的平稳性能;
(2)采用稳定轮倾覆系数能够有效评价轻型跨坐式单轨车辆曲线通过性能,可作为核心评价指标.由于轻型跨坐式单轨车辆重心低等特点,走行轮倾覆系数较小,采用走行轮倾覆系数已不能有效评价车辆的曲线通过性能,仅可作为一个参考评价指标,即使一侧走行轮不受力,只要稳定轮倾覆系数满足指标就不会出现车辆倾覆;
(3)对于采用辅助转向技术的转向架,采用“转向架某一侧导向轮一个径向力为0,另一个的径向力小于预压力的0.1倍预压力”作为评价指标无法全面评价轻型跨坐式单轨车辆曲线通过性能,但可作为一个参考评价指标;
(4)车辆侧滚角可作为一个评价指标.在车辆设计阶段应尽量保证车辆在任何工况下的侧滚角均不超过临界侧滚角φmax1,即保证车辆质心不会超出轨道梁宽度范围.正常运营工况尽量令车辆质心位于走行轮间距内.
猜你喜欢
防爆电机(2022年4期)2022-08-17
成都信息工程大学学报(2022年3期)2022-07-21
航空发动机(2021年1期)2021-05-22
科学与财富(2021年34期)2021-05-10
科学家(2021年24期)2021-04-25
科技研究·理论版(2021年20期)2021-04-20
科技研究·理论版(2021年20期)2021-04-20
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
娃娃乐园·3-7岁综合智能(2017年9期)2018-02-01
娃娃乐园·3-7岁综合智能(2017年8期)2018-02-01