基于路径规划与跟踪的自动泊车系统研究
2021-01-14 03:34熊能,孙梅
农机使用与维修 2021年1期
熊 能,孙 梅
(常德职业技术学院,湖南 常德 415000)
0 引言
城市空间拥挤的停车位使泊车变得越来越困难,新手驾驶员对此往往不知所措。倘若不能一次快速准确地完成泊车入位,还会导致交通堵塞,增加汽车尾气的排放,加重空气污染和能源的浪费。为了使驾驶员摆脱复杂低效率的泊车操作,并且降低泊车事故率,达到节能减排的要求,现代化的汽车应具备智能化的自动泊车系统。国内外有许多学者进行了自动泊车系统的研究工作,提出了多种控制方法。
泊车类型通常可分为垂直泊车、平行泊车和斜式泊车,本文研究的是垂直和平行泊车系统。自动泊车控制算法一般为以下两种:(1)基于路径规划与跟踪的控制方法,此方法由环境感知、路径规划和路径跟踪三个部分组成,车辆检测到目标车位后,根据车位形状、车辆模型和避撞约束条件等,预先规划好到达泊车终止点的路径,然后通过控制算法跟踪期望路径[1,2];黄晓峰[3]提出了一种分段式泊车轨迹决策算法,得到了同时满足平顺性和安全性的最优泊车轨迹。(2)基于人工智能的控制方法,此方法利用模糊逻辑或神经网络算法等去模拟泊车熟练的驾驶员的操作行为,将正常的泊车过程转化为控制器的控制算法,直接通过控制汽车方向盘转角和油门的方式,控制汽车实现泊车,包括模糊控制、神经网络等;温宗国等[4]采用了基于模糊控制的自动泊车方法,由于控制器的输入量较多,导致控制较为复杂;刘志强等[5]使用BP神经网络构建驾驶员模型进行自动泊车研究,取得了较好的效果,但模型的构建较为复杂;卢俊涛[6]使用卷积神经网络构造了泊车视觉算法,既保证了视觉准确率,也提高了视觉实时性。在泊车过程中,由于驾驶员在进行转向操作时,需要依据车辆与四周物体的位置关系进行转向和控制车速,复杂的泊车环境与有限的环境信息共同增加了泊车系统控制器的建模难度,而基于神经网络或模糊控制的泊车控制器难以精确地模拟驾驶员泊车行为,影响了泊车控制器的鲁棒性。同时由于神经网络需要极大的计算量,模糊控制又没有自学习能力,因此通过人工智能算法来实现实车运用还有很长的一段路要走。
本文从几何约束的路径规划与跟踪理论方面对平行和垂直泊车过程中转向控制策略进行研究,提出一套实现自动平行和垂直泊车功能的软硬件方案。该方案包括自动泊车系统工作原理、硬件系统原理、雷达探头的布局等,可实现车辆平行泊入、垂直泊入、平行泊出、垂直泊出等功能,整个过程驾驶员无需操作方向盘。
1 车辆位置检测
实际生活中的泊车情况通常可以分为三类:垂直泊车、平行泊车和斜向泊车。由于超声波传感器只能针对物体进行测距,则泊车目标车位两侧均无障碍时便无法检测到车位。因此本文只对有障碍的垂直车位、平行车位进行讨论。本文所设计自动泊车系统的测量模块通过车身四周的12个雷达探头测量车辆周围的环境参数,雷达探头选用德国博世公司USS5.0近距离雷达和USS5.1远距离雷达。4个近距离雷达分别通过安装支架卡接在前后保险杠两侧,8个远距离雷达分别通过安装支架卡接在前后保险杠上,如图1所示。
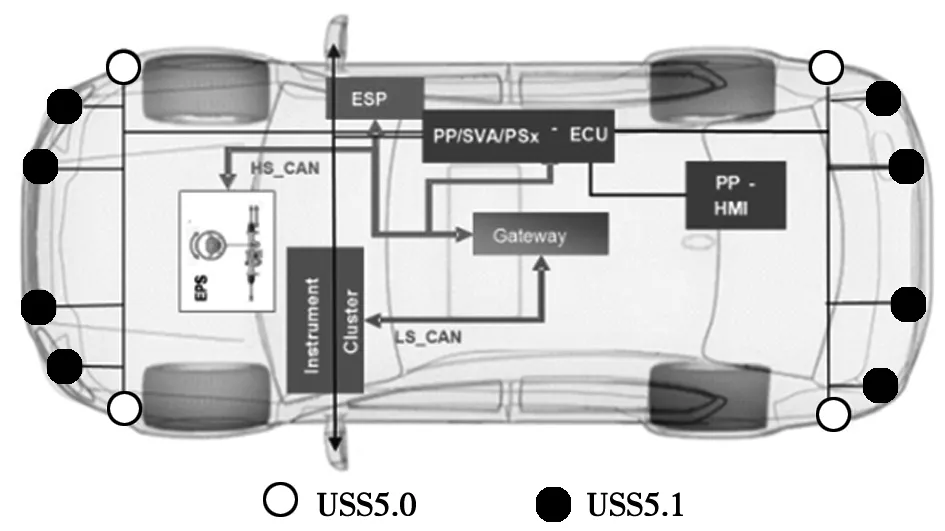
图1 自动泊车雷达布局图
2 路径规划与跟踪
由于路径规划方法具有设计简单、全局寻优的特点,因此采用该方法能更有效的设计自动泊车系统。自动泊车系统的路径规划是车辆在获取了周围环境信息后开始的,进行路径规划的前提是系统检测到合适车位,然后结合车辆和车位的相对位置、车辆自身运动学、车辆初始位置、道路边界等约束条件,以车辆参考点行驶轨迹为设计对象,生成起始点至泊车终止点的路径曲线,且路径曲线需满足连续、避障和易于跟踪等条件。基于路径规划与跟踪的泊车运动控制方法,首先通过雷达扫描可停车区域,然后基于可停车区域控制器规划可行的泊车轨迹,最后由控制器根据实时的车辆信息控制车辆方向盘及油门,制动系统使车辆按照预定轨迹行驶。相对于智能算法而言是比较符合目前汽车工业研究水平,并能运用于实际的控制方法。本文采用路径规划的方法对泊车路径进行规划,并通过模糊控制器进行路径跟踪,来设计自动泊车系统。该自动泊车系统的流程如图2所示。
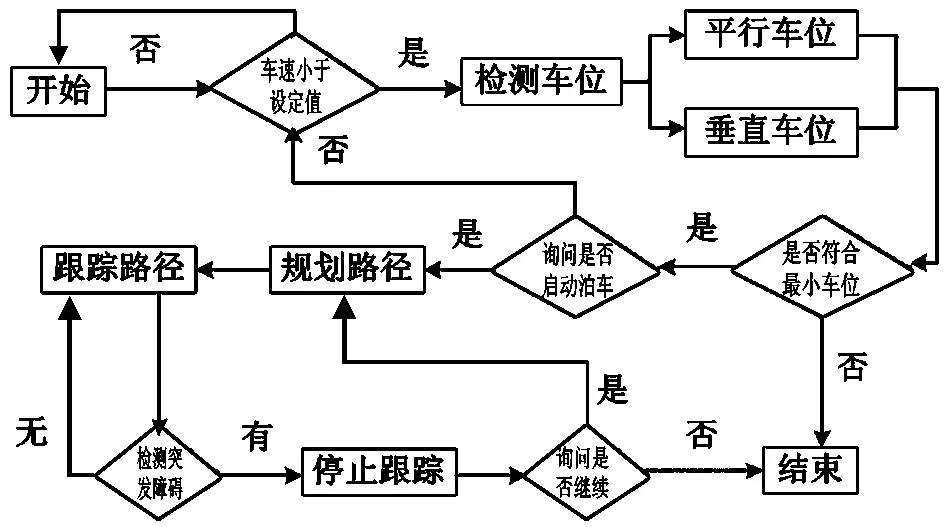
图2 自动泊车流程示意图
路径规划,首先需建立车辆的二自由度模型,计算出车辆倒车过程的最小转弯半径和起始点区域[7],然后确定规划路径的曲线类别和车辆姿态,最后确定避障约束,即完成所需路径规划设计。
路径跟踪,首先将车辆的实际运动模型与规划的路径相比较,计算出位置和方向误差;然后将位置和方向误差输入到模糊控制器,由模糊控制器计算出该时刻转向角的数值;最后,由计算出的转向角数值和速度信号共同控制车辆的运行。由此构成循环反馈。
以垂直车位的泊入为例。泊车系统开启后,泊车雷达探测左右侧车位,系统根据泊车雷达探测到的数据获取车位信息。图3为右侧有其他车辆情况下的垂直泊车示意图。自动泊车开始后,泊车车辆向前沿直线行驶,车辆周围泊车雷达开始工作,不停地探测车辆与四周物体的距离;当泊车车辆经过车辆A时,右前方传感器测距突然变小(检测到车辆A),随后增大(检测到车位);当泊车车辆驶离车辆A经过车辆B时(泊车指引①位置),右前方传感器测距突然变小(检测到车辆B),随后增大(越过车辆B),与此同时右后方传感器测距也变小(检测到车辆A);此过程检测出泊车车位,并通过右前方雷达测量出车位宽度信息,以便路径规划时使用;同时也测得泊车车辆与右侧车辆距离,确定是否能安全泊车。车辆泊入还需实时进行位置检测与路径跟踪(泊车指引②),并调整车辆姿态(泊车指引③)。最后完成泊入动作(泊车指引④)。在泊车过程中,所有雷达均一直处于开启状态,如果有物体离车太近,则自动泊车中止。
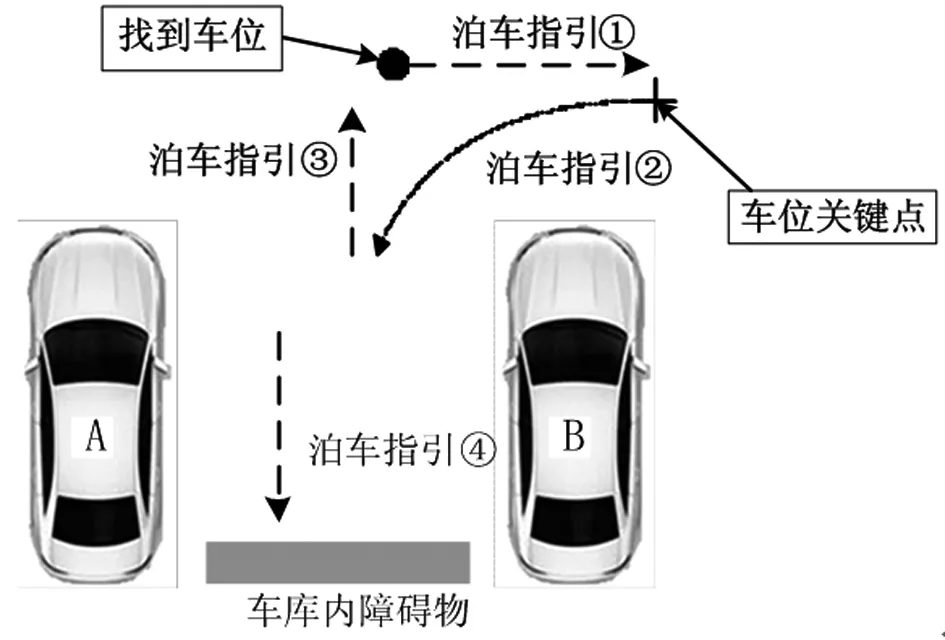
图3 垂直车位泊入流程示意图
3 自动泊车系统设计
本文所设计的自动泊车系统(以下简称PSC)状态机原理如图4所示,该状态机包含以下状态:(1)PSC_OFF:系统关闭,无任何模块工作;(2)PSC_Inactive:系统待机状态,电源管理及CAN收发模块工作,其他模块不工作;(3)PSC_Active:系统激活状态,各模块均正常工作,包括PSC_Search、POC、PSC_Guidance等状态;(4)PSC_Search:系统泊入搜索车位状态,正常搜索车位;(5)POC_Check_Environment:系统泊出检测状态,确认系统是否满足泊出状态的条件;(6)PSC_Guidance:系统泊车引导状态,车位搜索完成后,指引驾驶员泊车;(7)PSC_Self_Test:系统自检状态,检测所有雷达状态是否正确,所有节点信号是否在线;(8)PSC_Failure:系统故障状态,有雷达探头故障或关联节点不在线。
下面介绍自动泊车系统工作流程,以泊入平行车位为例:
(1)系统自检(PSC_Self_Test)。在整车上电后,PSC系统开始自检,自检完成后,若系统未被激活,不发送自检状态,若系统被激活,则发送自检状态。
(2)系统的启动(PSC_Actvie)。PSC自检正常时,PSC系统才可以开启系统,即切换状态至PSC_Active状态,在不同条件下,系统切换至对应的状态。当车速小于25 km·h-1时,按下系统开关,系统切换至泊入搜索车位(PSC_Search)状态。
(3)系统工作(PSC_active)。系统进入平行或垂直车位搜索状态之后,通过转向开关(TurnRightSwitch/ TurnLeftSwitch)选择搜索车位的方向;在搜索车位过程中,系统依据对应状态发送以下搜索车位状态信号,用于HMI显示。成功搜索到合适车位后后,系统会与EPS完成握手,并提示驾驶员控制汽车档位及刹车,直到泊车完成。
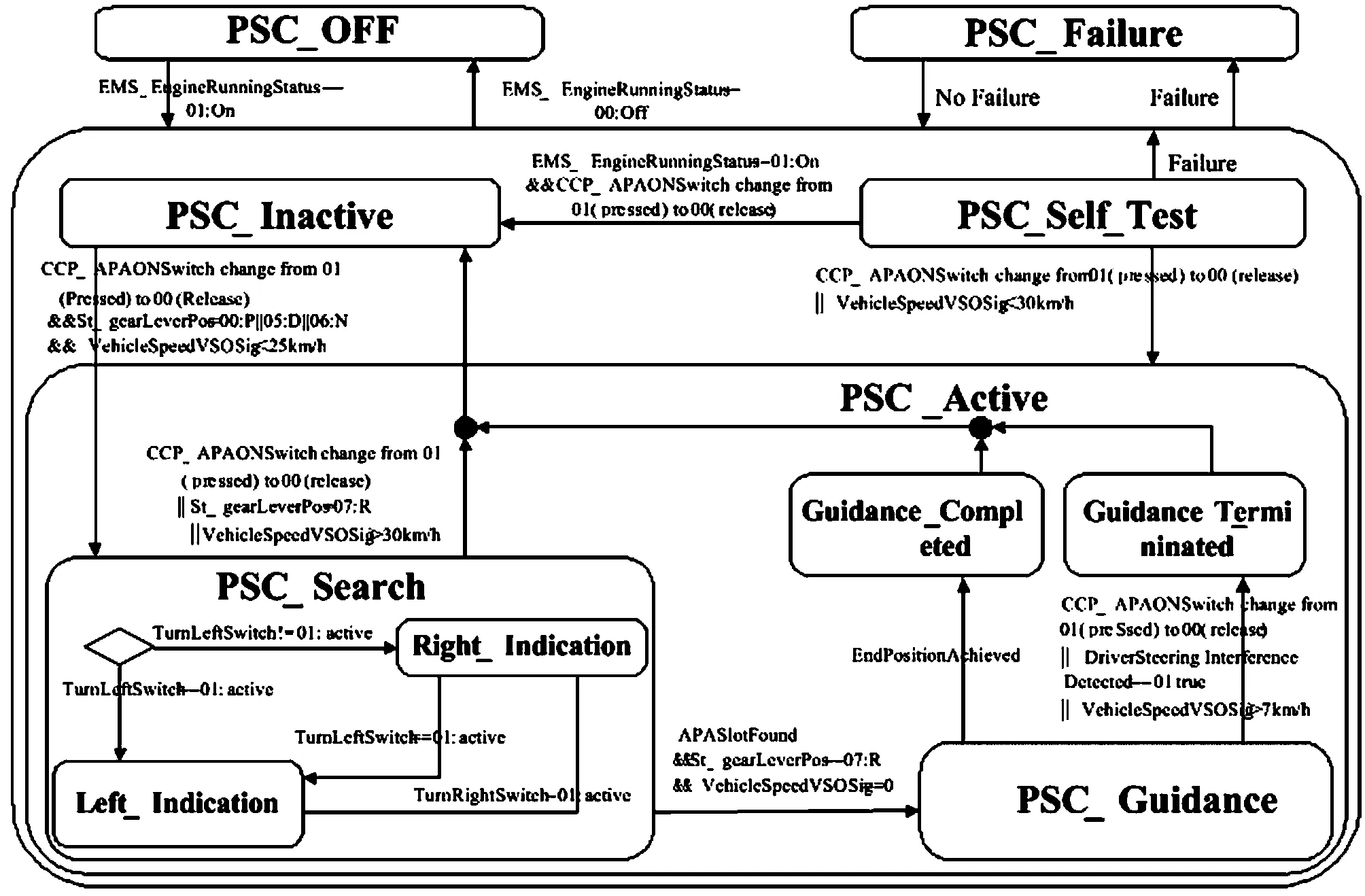
图4 自动泊车泊入状态机原理图
4 总结与展望
本文基于路径规划与跟踪算法,通过对自动泊车流程和控制进行研究,设计了一种能实现自动平行和垂直泊车功能的系统。该系统能自动搜索停车位,并辅助驾驶员完成平行、垂直车位的泊入、泊出功能,在降低建模难度和减少运算量的同时具有一定的鲁棒性。
猜你喜欢
大自然探索(2023年7期)2023-08-15
汽车实用技术(2023年10期)2023-06-14
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
军民两用技术与产品(2020年3期)2020-04-07
小学生学习指导(低年级)(2018年12期)2018-12-29
现代家长(2018年11期)2018-01-05
火控雷达技术(2016年3期)2016-02-06